@Fabric Foundation I stayed in the conference room after everyone left, the air conditioner ticking while a courier robot’s wheels hummed in the hallway. My browser had Fabric Protocol tabs from a call, and I kept circling the same worry: can an open robot network stay trustworthy when it hits the real world?
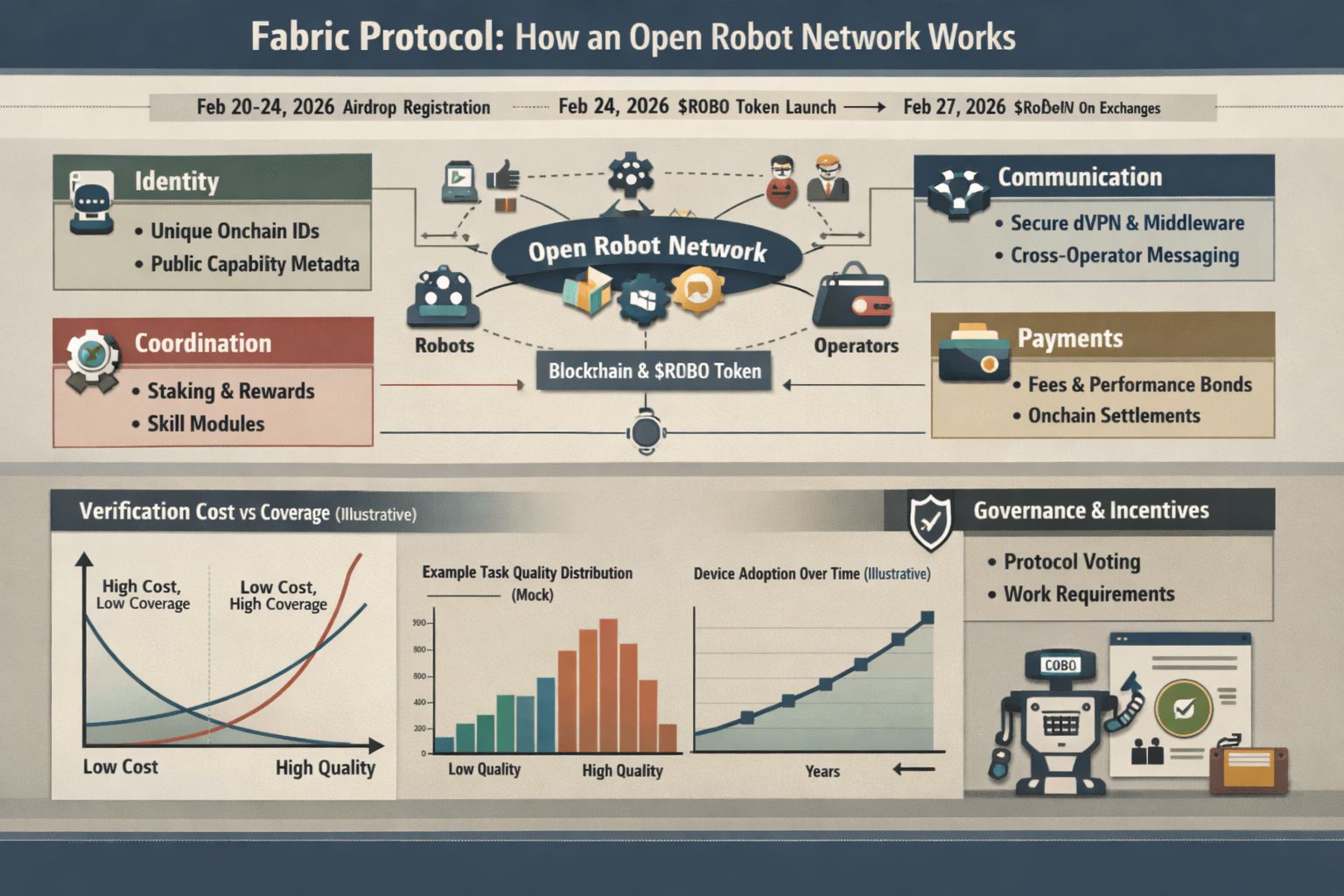
The timing explains why I’m thinking about it now. Fabric’s airdrop registration window ran February 20–24, 2026, and the Foundation published an “Introducing $ROBO” post on February 24, positioning the token as the fee and governance asset for identity, verification, and payments on a network that starts on Base and is meant to evolve toward its own chain. By February 27, $ROBO was live on spot markets, pulling the project out of niche circles.
When I hear “open robot network,” I don’t picture a sci-fi swarm. I picture infrastructure: naming, rules, and enough accountability that strangers can rely on each other’s machines. Fabric’s whitepaper frames the protocol as a global, open network that coordinates data, computation, and oversight through public ledgers so contributions and decisions are inspectable. That choice matters because robotics has historically lived inside closed fleets, private logs, and vendor contracts.
Identity is where this starts to feel concrete. The whitepaper describes each robot having a unique cryptographic identity and publicly exposing metadata about capabilities and the rule-sets that govern actions. The Foundation’s token post leans into a practical gap: robots can’t hold passports or bank accounts, so wallets and onchain identities become the handles for payment and responsibility. I like that it treats “who is this machine?” as a first-class problem instead of a footnote.
Communication is the next layer, and it’s easy to underestimate. OpenMind’s OM1 setup guide talks about real robot plumbing—cameras, microphones, LIDAR, and actuators—connected to a central computer via middleware like Zenoh and CycloneDDS. Fabric’s whitepaper mentions coordination software such as “dVPNs” for those transports, which suggests a goal of making cross-operator messaging routable and secure rather than trapped inside one lab network. I read this as the unglamorous work of getting machines to talk reliably before asking them to cooperate economically.
Coordination is where Fabric starts to look like a network instead of a stack. The $ROBO post describes staking to participate and rewards tied to verified work: task completion, data, compute, and validation. The whitepaper adds “crowdsourced robot genesis” and activation via participation units, plus an aspirational “skill chips” model where discrete capabilities can be installed and shared like apps. That last part is a fresh angle for me: it turns skills into something portable and auditable, not just a proprietary blob that ships with a specific robot.
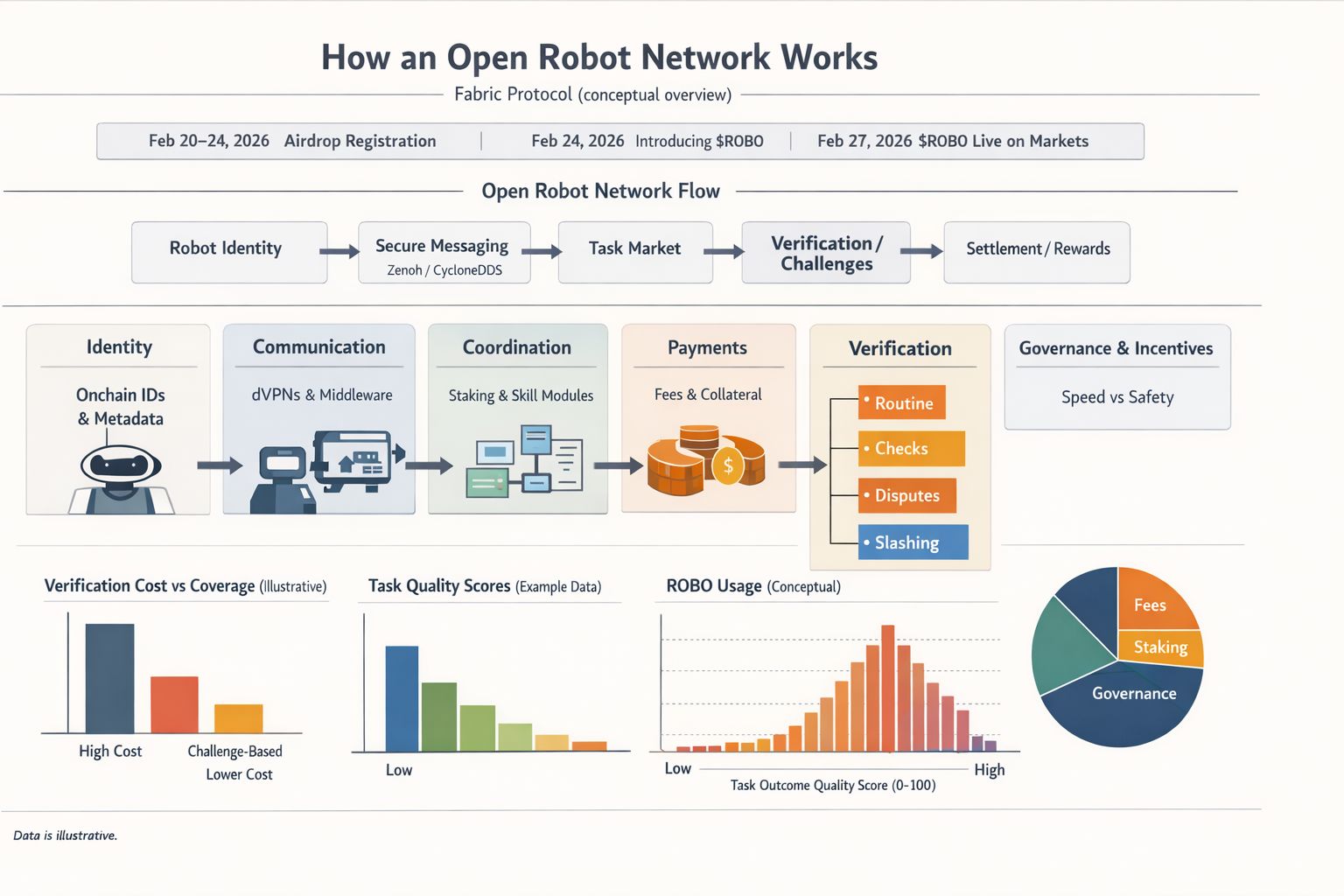
Money moves through the same rails. The whitepaper says ROBO is used for network-native fees like data exchange, compute tasks, and API calls, while allowing services to be quoted in stable terms and then converted onchain for settlement. It also describes refundable performance bonds posted by operators, with per-task stakes “earmarked” from that bond so frequent work doesn’t require a new staking step each time. The most interesting wrinkle is “device delegation,” where token holders can add collateral to specific devices or pools as a reputation signal and capacity boost.
Verification is the unavoidable hard part. Fabric’s whitepaper is blunt that universal verification would be too expensive, so it proposes a challenge-based system designed to make fraud unprofitable in expectation. Validators stake a bond, run routine availability and quality checks, and resolve disputes; proven fraud can trigger slashing of a task stake, and sustained quality degradation can suspend reward eligibility. I appreciate the realism here, because physical work invites corner-cutting and sensor games, and a network without teeth becomes a rumor mill.
My hesitation sits in governance and incentives, not in the math. The whitepaper describes governance touching things like verification and slashing rules and upgrades, while framing those rights as limited to protocol operations. That sounds tidy on paper, yet governance in any open system becomes a contest between speed, safety, and who has time to show up. Fabric also leans on “real work” requirements as a Sybil defense, which is sensible but operationally heavy; it implies tooling to measure work and to challenge it without turning every dispute into a saga.
The broader trend line helps explain the current attention. DePIN research describes networks that decentralize control and management of physical devices using blockchain, and industry reports argue that device-contributed networks are no longer a novelty, with millions of devices contributing daily and a growing AI × DePIN overlap. Fabric sits directly in that overlap, and the late-February 2026 token events made it easier for people to talk about—sometimes thoughtfully, sometimes not.
I’m left with cautious optimism and a checklist. Identity and messaging feel plausible because they build on known primitives. Verification and governance feel plausible only if deployments stay small enough to learn from, then scale with discipline. I want an open robot network that earns trust the slow way—through logs, honest penalties, and useful work that outsiders can actually watch in plain sight.