Ein Roboternetzwerk kann Aufgaben schnell verarbeiten und dennoch strategisch scheitern, wenn die Politikaktualisierungen hinter den realen Vorfällen zurückbleiben.
Die meisten Systeme betrachten Governance als statische Dokumentation, während sich die Operationen jede Woche ändern. Diese Lücke schafft stilles Risiko. Neue Fehlermodi erscheinen, Betreiber improvisieren, und Regeln driften von der Realität ab, bis ein größerer Streit einen Notfalleingriff erzwingt. Geschwindigkeit ist in diesem Szenario nicht der Engpass. Die Reaktionsfähigkeit der Governance ist es.
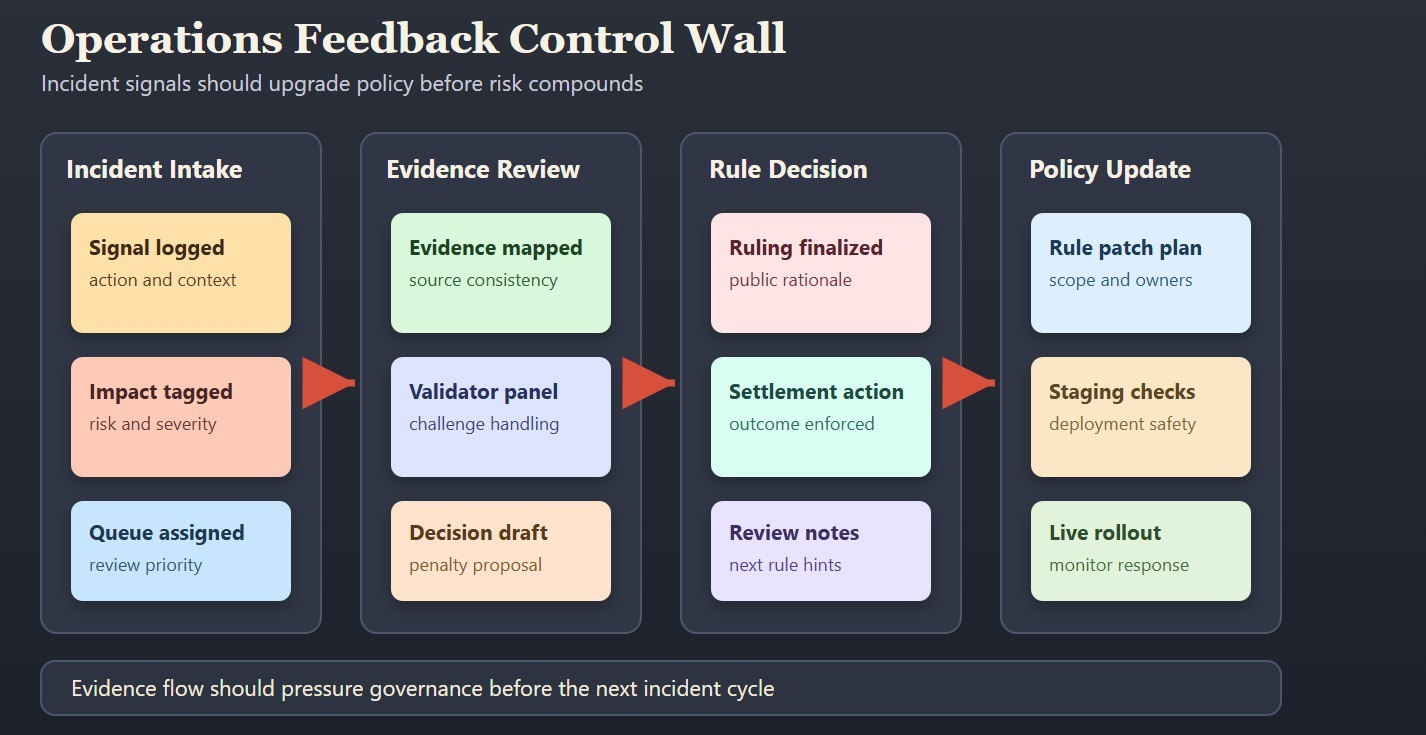
Die Rahmenbedingungen von Fabric sind nützlich, da sie die Ausführungsrückmeldungen an ein öffentliches Koordinationsmodell anstatt an einen geschlossenen Ausschusskreis binden. Herausforderungsmechaniken, Validatorenökonomie und sichtbare Regelwege schaffen eine Struktur, in der Beweise aus den Operationen politischen Druck auf Veränderungen ausüben können, bevor der Schaden sich verstärkt. Das ist eine stärkere Zuverlässigkeitsthese als "wir haben gute Modelle und gute Absichten."
Das reframed auch, wie ich `$ROBO` lese. Nutzen und Wert der Governance sollten aus der tatsächlichen Nutzung der Kontrollfläche stammen: Teilnahme an der Aufsicht, Ausrichtung der Anreize und Kontinuität der Regelentwicklung unter Last. Wenn diese Mechanismen aktiv sind, kann das Netzwerk durch Druck verbessert werden. Wenn sie inaktiv sind, wird die Governance zur Marke.
Für Teams, die langfristige Robotikdienste bereitstellen, ist die praktische Frage nicht, ob Vorfälle eintreten. Das werden sie. Die entscheidende Frage ist, ob jeder Vorfall das System verwaltbarer oder fragiler macht.
Wenn das nächste umstrittene Roboterergebnis in die Produktion geht, wird sich Ihre Politikebene durch öffentliche Beweise anpassen, oder wird es von privaten Ausnahmen und verzögertem Vertrauensaufbau abhängen?
@Fabric Foundation $ROBO #ROBO