
@Fabric Foundation Vor ein paar Monaten sah ich einen kleinen Reinigungsroboter in einem Einkaufszentrum vor einer temporären Barriere langsamer werden. Jemand hatte an diesem Morgen einen Ausstellungsstand verschoben, und die übliche Route des Roboters funktionierte nicht mehr. Er hielt länger an als erwartet. Lange genug, dass ich mich für einen Augenblick fragte, ob das System stehen geblieben war.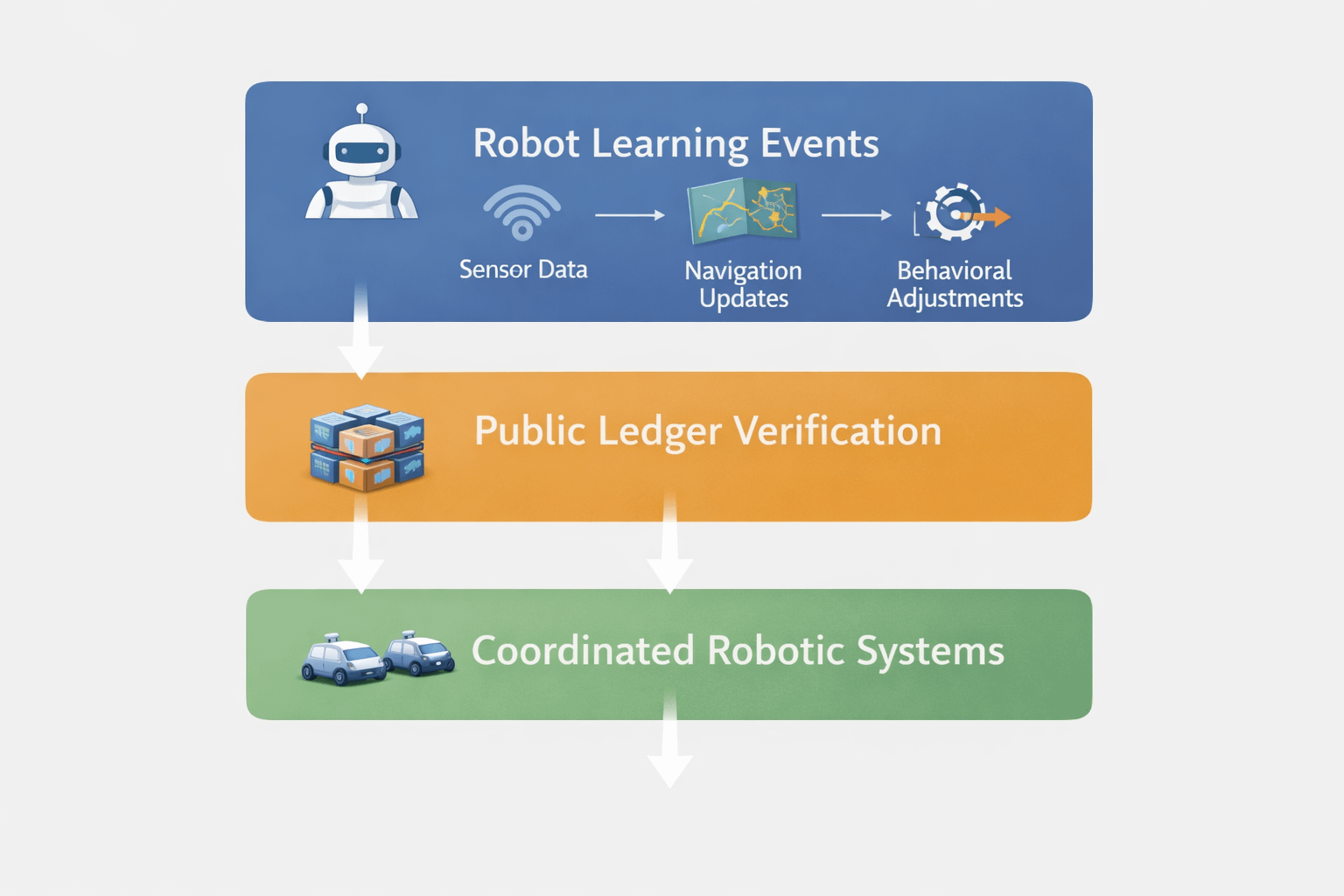
Dann bewegte er sich leicht, scannte erneut und umging das Hindernis.
Die meisten Menschen, die vorbeigingen, bemerkten wahrscheinlich nicht den Moment. Es war ruhig, fast unauffällig. Aber das Beobachten, wie die Maschine ihr Verhalten so anpasst, wirft ein seltsames Detail über robotische Systeme auf. Jede kleine Korrektur, jede Zögerung, jeder neue Weg ist eine Form des Lernens.
Was nicht offensichtlich ist, ist, wohin dieses Lernen tatsächlich geht.
In der Praxis arbeiten die meisten Roboter innerhalb ziemlich kontrollierter Feedback-Schleifen. Eine Maschine sammelt Sensordaten, während sie Aufgaben ausführt, protokolliert die Ergebnisse und sendet diese Informationen zurück an die Infrastruktur, die dem Entwickler oder Hersteller gehört. Ingenieure studieren die Daten später, trainieren Modelle neu und geben schließlich Software-Updates frei, die zurück zu den Maschinen fließen.
Es funktioniert. Meistens.
Aber das Lernen selbst bleibt in privaten Systemen. Ein Roboter könnte einen besseren Weg entdecken, um überfüllte Räume zu navigieren oder bestimmte Hindernisse zu vermeiden, doch diese Verbesserung verlässt selten die Organisation, die die Maschine gebaut hat.
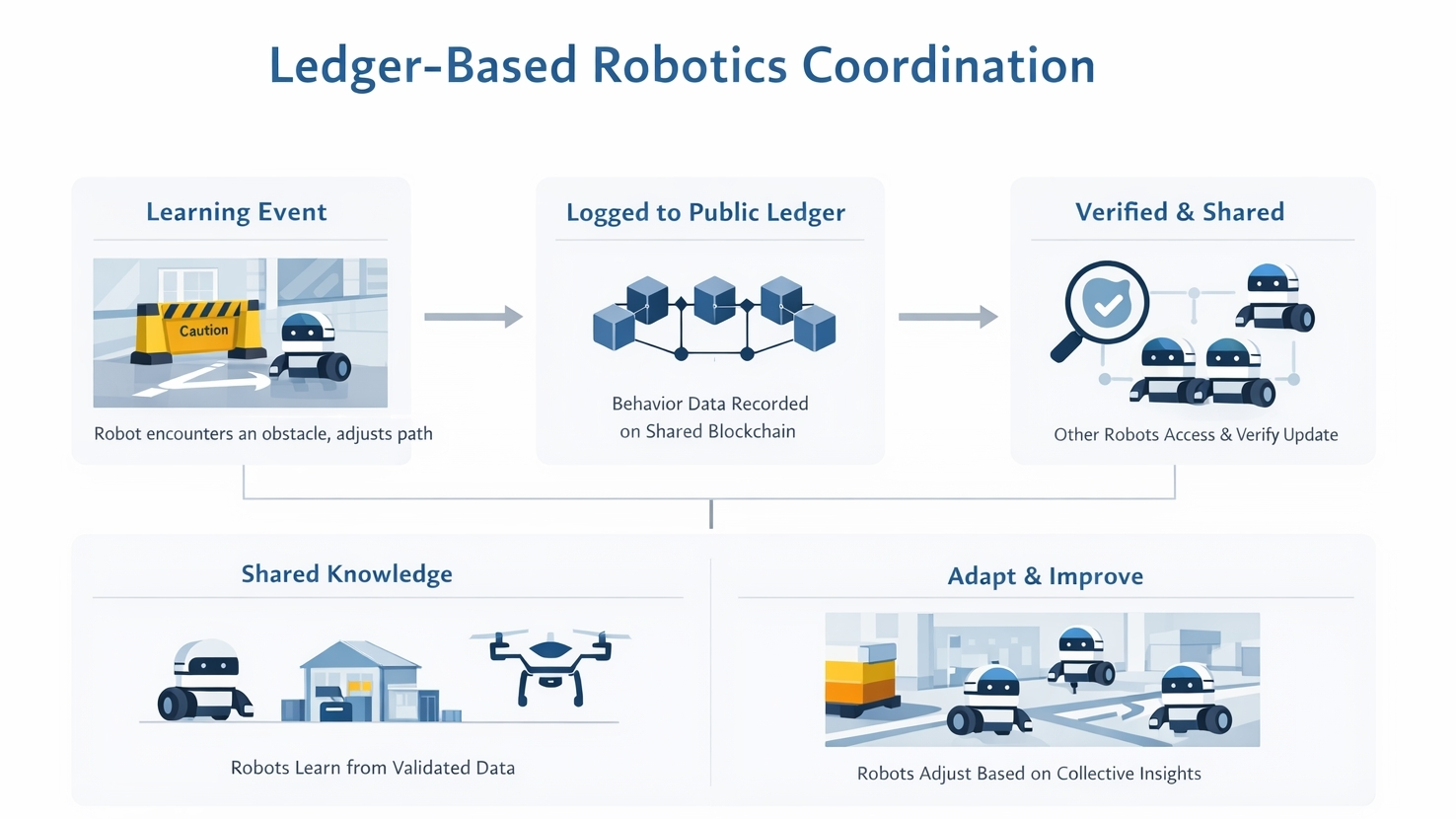
Die Fabric Foundation scheint mit einem etwas anderen Koordinationsmodell durch ihre Robotik-Infrastruktur und das ROBO-Ökosystem zu experimentieren. Anstatt operationale Kenntnisse in zentralen Datenbanken zu halten, besteht die Idee darin, bestimmte Maschinenverhalten über ein öffentliches Ledger aufzuzeichnen.
Operationell verhält sich dieses Ledger ein wenig wie ein gemeinsames Aktivitätsprotokoll. Es ist ein Protokoll, das mehrere Teilnehmer lesen und verifizieren können. Jeder Eintrag enthält einen Zeitstempel - einfach ein Marker, der zeigt, wann etwas passiert ist - und kryptografische Signaturen, die es schwierig machen, den Eintrag danach zu ändern.
Dieses Detail ist wichtig.
Denn sobald robotische Aktivitäten beginnen, eine überprüfbare Spur zu hinterlassen, beginnt die Koordination, sich anders zu verhalten.
Stellen Sie sich eine Lagerumgebung vor, in der mehrere Roboter in überlappenden Systemen arbeiten. Eine Maschine erkennt, dass ein bestimmter Flur zu bestimmten Zeiten häufig überlastet ist, und passt entsprechend ihren Weg an. In einer traditionellen Einrichtung könnte diese Beobachtung innerhalb des Unternehmens, das den Roboter betreibt, bleiben.
Mit einem ledger-basierten System könnten bestimmte Lernereignisse oder Verhaltensupdates in einer gemeinsamen Infrastruktur protokolliert werden, in der andere Maschinen überprüfen können, dass die Beobachtung existiert.
Nicht automatisch vertrauen.
Überprüfen Sie es einfach.
Das Fabric-Protokoll kombiniert diesen Protokollierungsansatz mit etwas, das verifiable computing genannt wird. Das Konzept klingt technisch, aber die grundliegende Idee ist einfach. Ein System kann einen Beweis dafür erbringen, dass eine Berechnung oder ein Trainingsprozess korrekt ausgeführt wurde, ohne dass jeder andere Teilnehmer die Arbeit selbst wiederholen muss.
Für Roboternetzwerke bedeutet das, dass Maschinen überprüfen könnten, ob ein Verhaltensupdate oder Datensatz bereits validiert wurde, bevor sie entscheiden, ob sie es integrieren.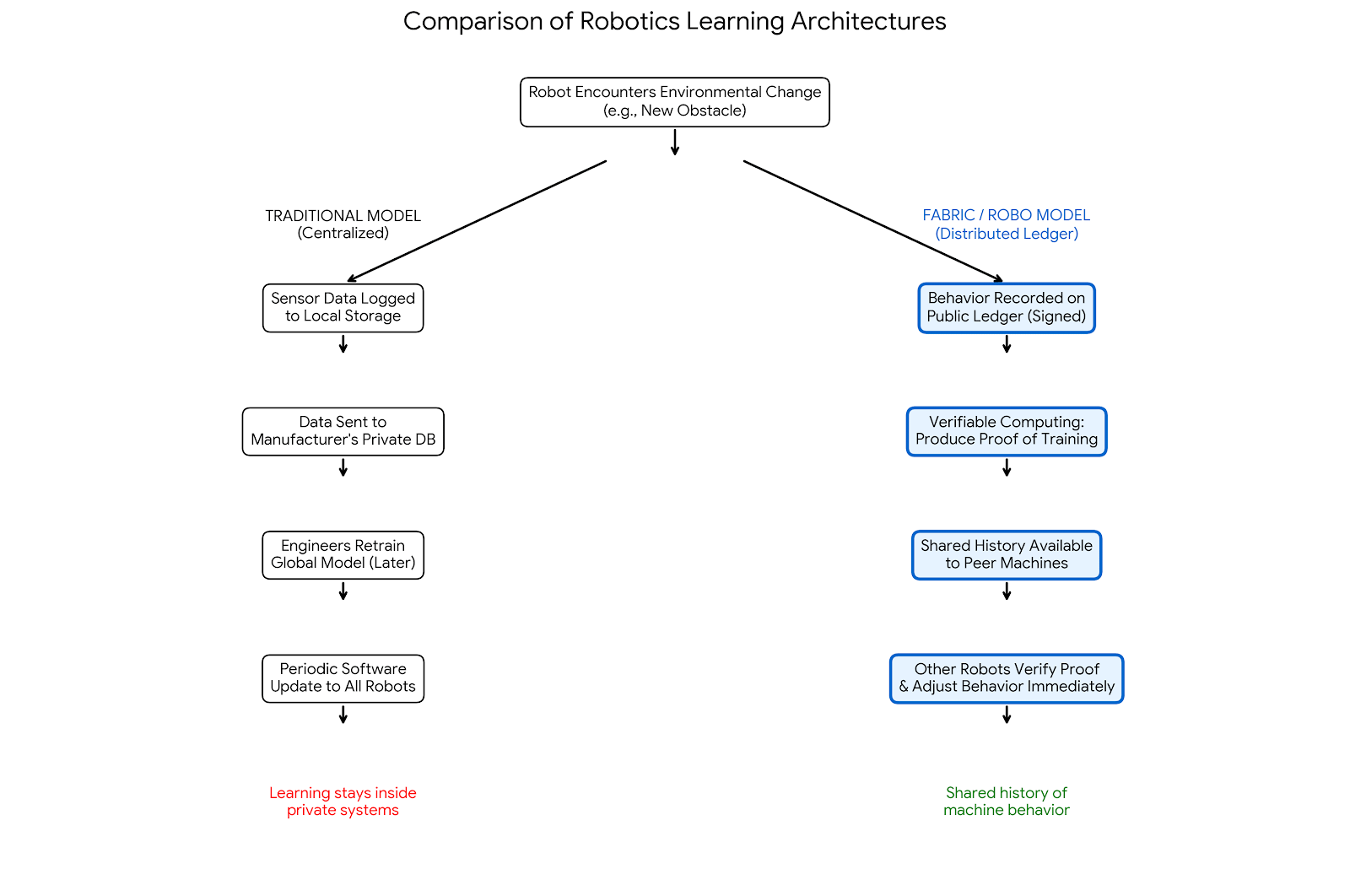
Die Struktur führt zu Kompromissen. Verteilte Ledger bewegen sich langsamer als zentrale Datenbanken, und Robotersysteme arbeiten oft in Umgebungen, in denen das Timing wichtig ist. Ingenieure müssten sorgfältig entscheiden, welche Arten von Maschinenaktivitäten zur gemeinsamen Infrastruktur gehören und welche lokal zum Roboter selbst bleiben.
Verifizierung löst auch nicht alles.
Roboter haben es weiterhin mit chaotischen physischen Realitäten zu tun: fehlerhafte Sensoren, sich ändernde Umgebungen, mechanischer Verschleiß. Selbst perfekt aufgezeichnete Daten können zu unvollkommenen Entscheidungen führen, wenn die Maschine die Welt in Echtzeit falsch interpretiert.
Und die Governance sitzt eine Ebene über all dem. Wenn Roboter beginnen, operationale Signale über gemeinsame Infrastruktur auszutauschen, muss jemand immer noch definieren, wie diese Signale das Verhalten beeinflussen. Transparenz hilft Beobachtern zu verstehen, was sich geändert hat und wann. Es beantwortet nicht unbedingt, wer die Regeln festlegt.
Deshalb denke ich immer wieder an diese kleine Pause im Einkaufszentrum.
Der Roboter funktionierte nicht fehlerhaft. Er passte sich an eine geringfügige Änderung seiner Umgebung an. Ein kleines Lernereignis, das wahrscheinlich später in einem internen Protokollierungssystem verschwand.
Wenn Systeme wie Fabrics ledgerbasierte Koordination an Bedeutung gewinnen, könnten solche Momente nicht isoliert bleiben. Sie könnten Teil einer gemeinsamen Geschichte des Maschinenverhaltens werden, bei der kleine Anpassungen sich über Tausende von Geräten ansammeln.
Ob diese Infrastruktur jedoch skalierbar ist, ist immer noch etwas, das die Robotikwelt leise herausfindet.#ROBO $ROBO
