Most people think the hardest part of robotics is autonomy. I do not think that is the real problem, and Fabric Foundation points to a more overlooked one.
The bigger issue starts after the robot is already capable. The real question becomes: who actually had the right to control it at that moment, under what rules, and with what transfer of authority? In multi-operator environments, that answer can get blurry very fast. That is where Fabric Foundation starts to feel important to me. Its opportunity is not just machine coordination in some broad abstract sense. It is the idea of turning proof of control into a portable and verifiable record.
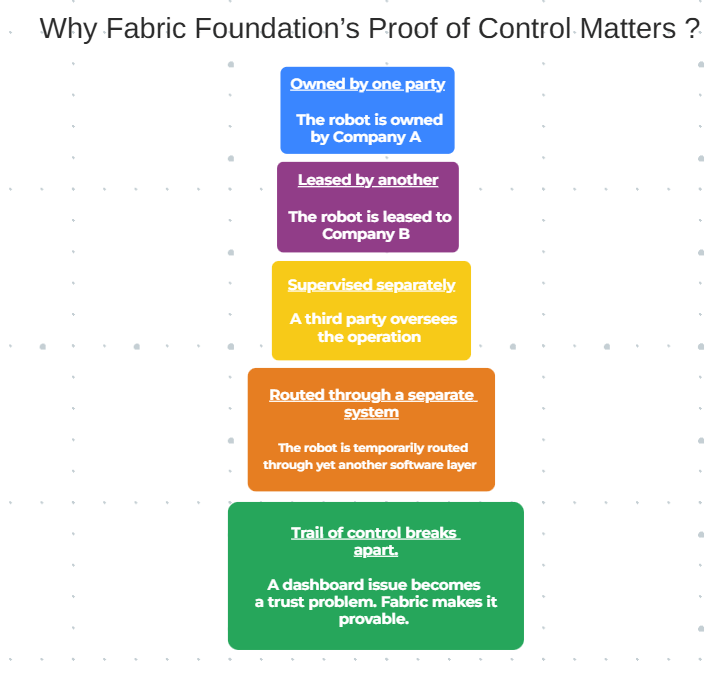
I think this is where a lot of people misunderstand robotics, and it is also where Fabric Foundation becomes easier to appreciate. People talk about command as if it is always obvious. But it is not obvious once robots start moving across operators, contractors, warehouses, software systems, and different policy environments. That is exactly the kind of fragmentation Fabric Foundation is trying to make legible. A machine can be owned by one party, leased by another, supervised by someone else, and temporarily routed through a separate system just to complete a task. The robot may still be moving, but the trail of control starts breaking apart. And once that happens, “who controlled what” stops being a simple dashboard detail. It becomes a trust issue, which is why @Fabric Foundation focus on proof of control matters.
That is the gap Fabric Foundation seems to be trying to solve.
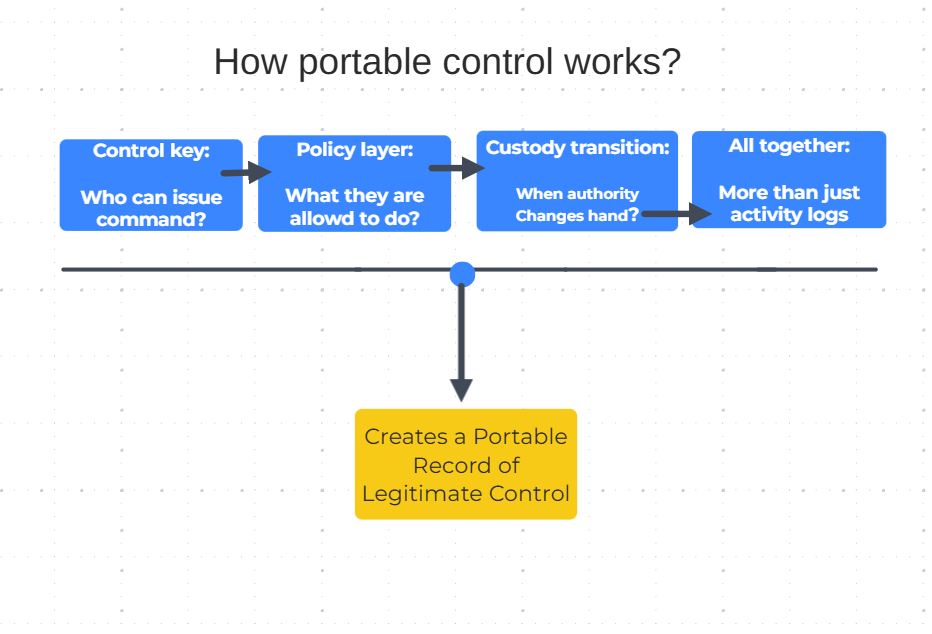
To me, the thesis is not just identity on its own. It is the combination of control keys, policy layers, and custody transitions in a way that lets authority move without becoming invisible. A control key shows who can issue commands. A policy layer defines what that controller is actually allowed to do. A custody transition records when that authority passes from one party or system to another. Put together, those parts become much more useful than a normal machine activity log. They create a portable record of legitimate control.
This gets easier to understand with a simple example:
Imagine a warehouse robot worth $18,000 carrying high-priority medical inventory between two facilities. Company A owns the machine. Company B leases it for a 6-hour shift. A third-party safety vendor has emergency override rights. At 10:00 AM, Company B gets temporary control for route execution, but the policy only allows movement in Zones 1 to 4 and limits the robot to a maximum speed of 1.2 m/s. Then at 1:15 PM, the robot enters a restricted loading bay in Zone 6 and pauses inventory transfer for 11 minutes, causing a downstream delay worth $3,400.
At that point, the main question is no longer just whether the robot entered the wrong zone. The deeper question is: which control key authorized that move, whether it broke the active policy layer, and whether custody had already shifted at that moment or not.
That is why proof of control matters. Without it, every failure turns into a blame game between the owner, the operator, the software provider, and the supervisor. With it, the system can show whether authority was valid, delegated, limited, expired, or abused. That is what makes this more interesting than a basic robotics narrative. Fabric Foundation is not only trying to help machines operate. It is trying to make robotic authority auditable across boundaries.
A machine can be autonomous and still be operationally ungovernable. Proof of control is what closes that gap.
I think that line matters because robotics is moving toward a world where machines will not remain inside one company’s clean internal stack. They will move across shared logistics networks, vendor-managed sites, outsourced maintenance systems, and mixed-permission workflows. In that kind of environment, performance alone is not enough. The more valuable primitive becomes proof that the command itself was legitimate. That changes the whole framing. The question is no longer only, “Can the robot do the job?” It becomes, “Can the system prove the job was done under valid control?”
That is where the broader implication for Fabric Foundation starts to stand out:
A lot of crypto infrastructure focuses on ownership, settlement, or identity. Those are important, of course. But very few systems are really centered on portable command legitimacy for machines operating in the physical world. If Fabric Foundation gets this right, proof of control could become one of those ideas that looks niche early, but later feels unavoidable once robotic workflows start crossing organizational boundaries at scale.
My own view is that this category becomes more important over time, not less. As multi-operator robotics grows, the winners may not be the projects with the flashiest autonomy demos. They may be the systems that make control, delegation, and accountability clear enough for real deployment. And if that is true, then Fabric Foundation may be doing something much more important than a simple “robotics + blockchain” story. It may be helping define the rules for who gets to command machines, when they can do it, and what proof stands behind that authority.
#ROBO
$ROBO
