@Fabric Foundation When I first looked at the idea of machines cooperating across borders using a digital token, my instinct was to treat it as another familiar crypto story. A token appears, a network forms around it, and suddenly the narrative becomes about scale. That explanation sounds neat on the surface. What struck me after thinking about ROBO Coin is that the real issue is not scale. It is coordination.
A common misconception sits right at the center of this discussion. Many people assume that global machine cooperation is simply a hardware challenge. Build more robots, connect them to the internet, and they will naturally work together. The deeper problem is economic and organizational. My view is that ROBO Coin is less about robotics payments and more about creating a shared incentive layer that allows independent machines to cooperate without centralized supervision.
On the surface, machine cooperation appears straightforward. A robot in one location performs a task, another machine processes data from that action, and a system records the result on a distributed ledger. It looks like automation moving smoothly across a network. Underneath, however, something much more complex is happening. The network must verify that each machine is real, that the data comes from legitimate hardware, and that the work was actually completed.
That verification process matters because machines operate in environments where trust is fragile. If one robot claims to deliver a package, the system must confirm the event without relying on a central authority. This is where ROBO Coin enters the structure. The token acts as a coordination signal that encourages machines and operators to follow shared rules.
Understanding that mechanism becomes easier when viewed through the lens of scale. The International Federation of Robotics estimates that more than 4 million industrial robots are currently operating worldwide. That number represents automated systems inside factories, warehouses, and logistics centers. Each of those machines produces streams of data about tasks completed, movements made, and resources consumed.
On the surface, that data looks like operational telemetry. Underneath, it represents potential economic signals. If machine actions can be verified and recorded reliably, those actions can be priced, traded, and coordinated across networks. ROBO Coin becomes a way to translate machine activity into an economic language shared by multiple participants.
That translation enables something subtle but important. Machines owned by different organizations can cooperate without needing to trust each other directly. Instead, they rely on a shared ledger that records actions and distributes incentives through the token system.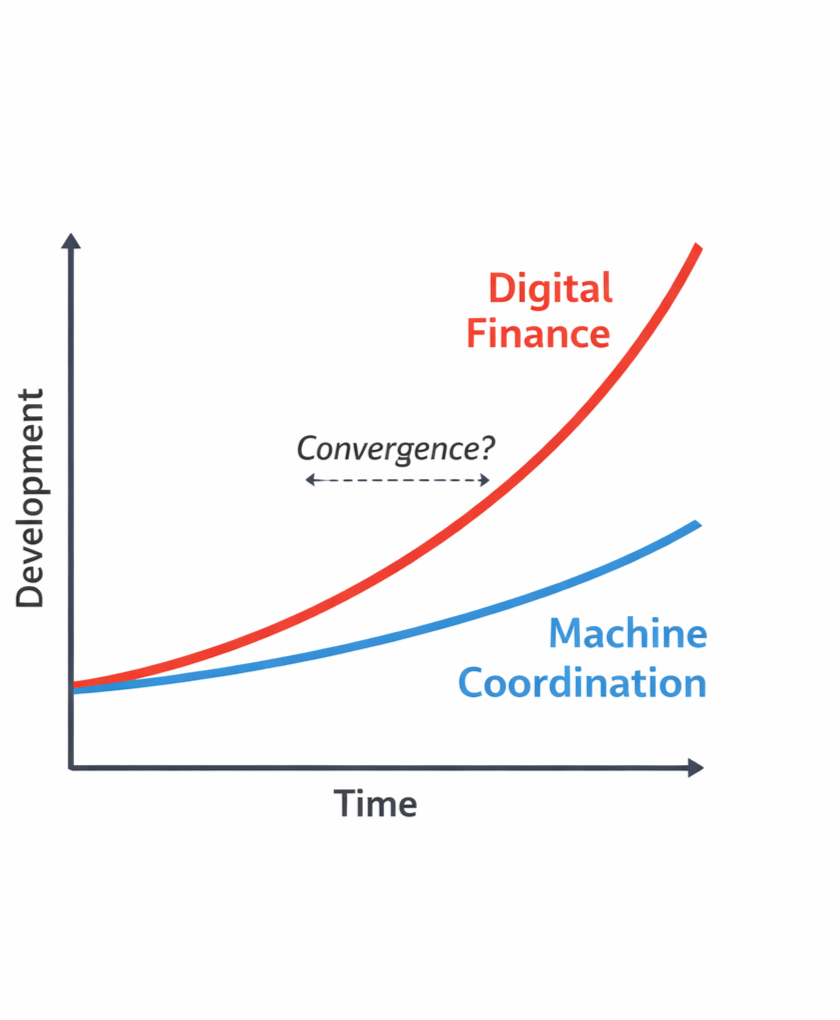
This coordination model begins to make more sense when placed in the broader crypto market environment. Global cryptocurrency trading volume frequently exceeds 60 billion dollars per day across exchanges. That figure reveals the size of the coordination network already operating within digital finance. Millions of participants interact with shared ledgers and token incentives every day.
That momentum creates another effect. As financial infrastructure becomes accustomed to token-based coordination, similar mechanisms can begin supporting physical systems. The transition from digital transactions to physical actions becomes less abstract.
Meanwhile institutional participation in crypto continues to evolve. In the United States alone, Bitcoin exchange traded funds attracted more than 10 billion dollars in inflows during their early months of trading. That number signals something important. Traditional capital is slowly becoming comfortable with blockchain infrastructure as a settlement layer.
When institutions begin trusting blockchain settlement for financial assets, the idea of verifying machine activity on similar infrastructure starts to appear less unusual. The same systems that coordinate billions in capital flows could potentially coordinate machine actions as well.
Of course this raises important tradeoffs. On the surface, token systems appear to solve coordination problems. Participants follow incentives, validators confirm actions, and the network maintains consistency. Underneath, however, the system must balance several pressures.
One pressure involves computational cost. Verifying machine actions across a network requires processing power. If verification becomes too expensive, participation drops. If it becomes too cheap, malicious actors may attempt to exploit the system.
Another pressure involves identity. Machines must possess cryptographic identities that prove they are legitimate participants in the network. That identity acts like a digital passport attached to hardware. It allows the network to distinguish real machine actions from simulated data.
This structure enables global cooperation between autonomous systems. A robot delivering goods in one country could coordinate with warehouse machines in another location without relying on a single platform operator. Instead, they interact through shared economic signals.
Yet this vision introduces risks that deserve attention. Machine networks operating across borders must navigate regulatory environments that are still evolving. Governments remain cautious about decentralized systems, particularly when they interact with real-world infrastructure.
There is also the question of reliability. Machines operate in unpredictable environments. Sensors fail. Networks disconnect. Data can be corrupted before it reaches the ledger. Designing systems that maintain trust under these conditions requires careful infrastructure design.
Early signs suggest that developers are aware of these constraints. Many robotics researchers now focus on verification systems that confirm machine behavior through multiple data sources. Cameras, sensors, and location signals can work together to prove that a physical event occurred.
If this approach holds, token systems like ROBO Coin could become part of a broader machine coordination architecture. Not the entire solution. But one layer within a larger system.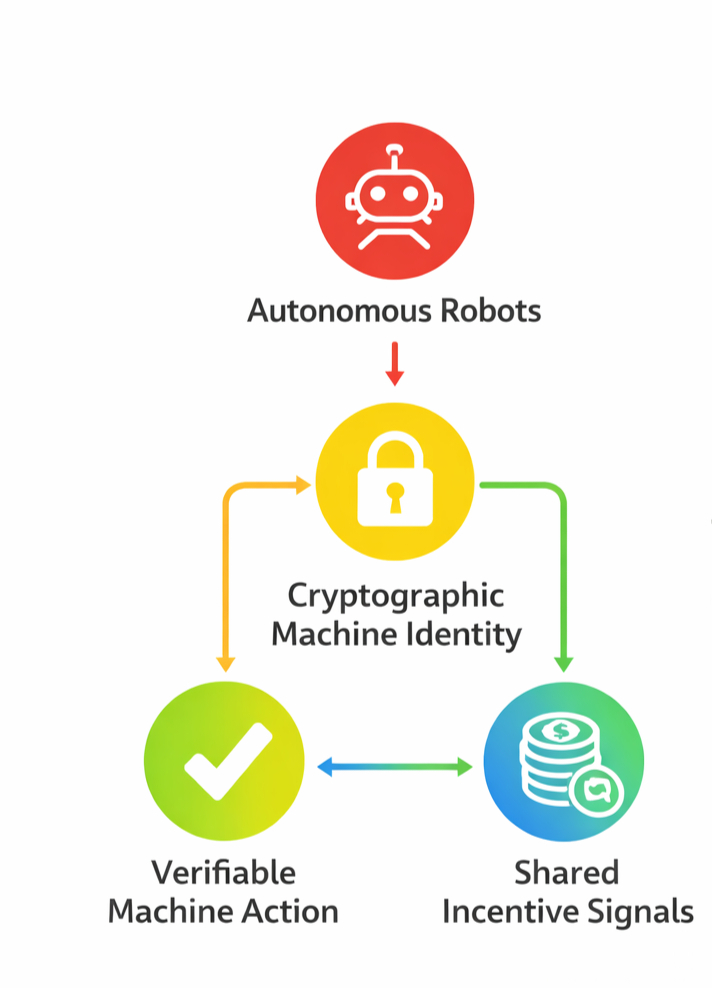
Meanwhile another trend is quietly emerging. Artificial intelligence is increasingly controlling physical machines. Autonomous drones, delivery robots, and warehouse automation systems already rely on software agents to make decisions. As those systems scale, the question of accountability becomes more urgent.
If a machine makes a decision, someone must verify the outcome. That verification may eventually rely on blockchain-style ledgers capable of recording events transparently.
Understanding that helps explain why discussions around ROBO Coin are appearing now rather than earlier. For the past decade blockchain development focused heavily on transaction speed and trading infrastructure. Networks competed to process more transactions per second and reduce costs.
That phase addressed financial coordination. The next phase may focus on physical coordination. Machines interacting with the real world create events that must be recorded, verified, and sometimes rewarded.
This transition is still early. Machine economies remain experimental, and global robotics infrastructure is far from standardized. Yet the direction is becoming clearer.
Digital networks have already proven capable of coordinating financial activity across continents. If the same principles begin coordinating machines, the boundaries between digital and physical systems start to blur.
That possibility is what makes the discussion around ROBO Coin interesting. The token itself may not be the most important piece of the puzzle. What matters more is the coordination model it represents.
A shared economic signal that allows independent machines to cooperate without centralized control.
If that model holds under real pressure, the implications extend far beyond robotics. The next generation of blockchain infrastructure may not just manage digital assets.
It may quietly coordinate the behavior of machines working together across the world.#robo #ROBO $ROBO