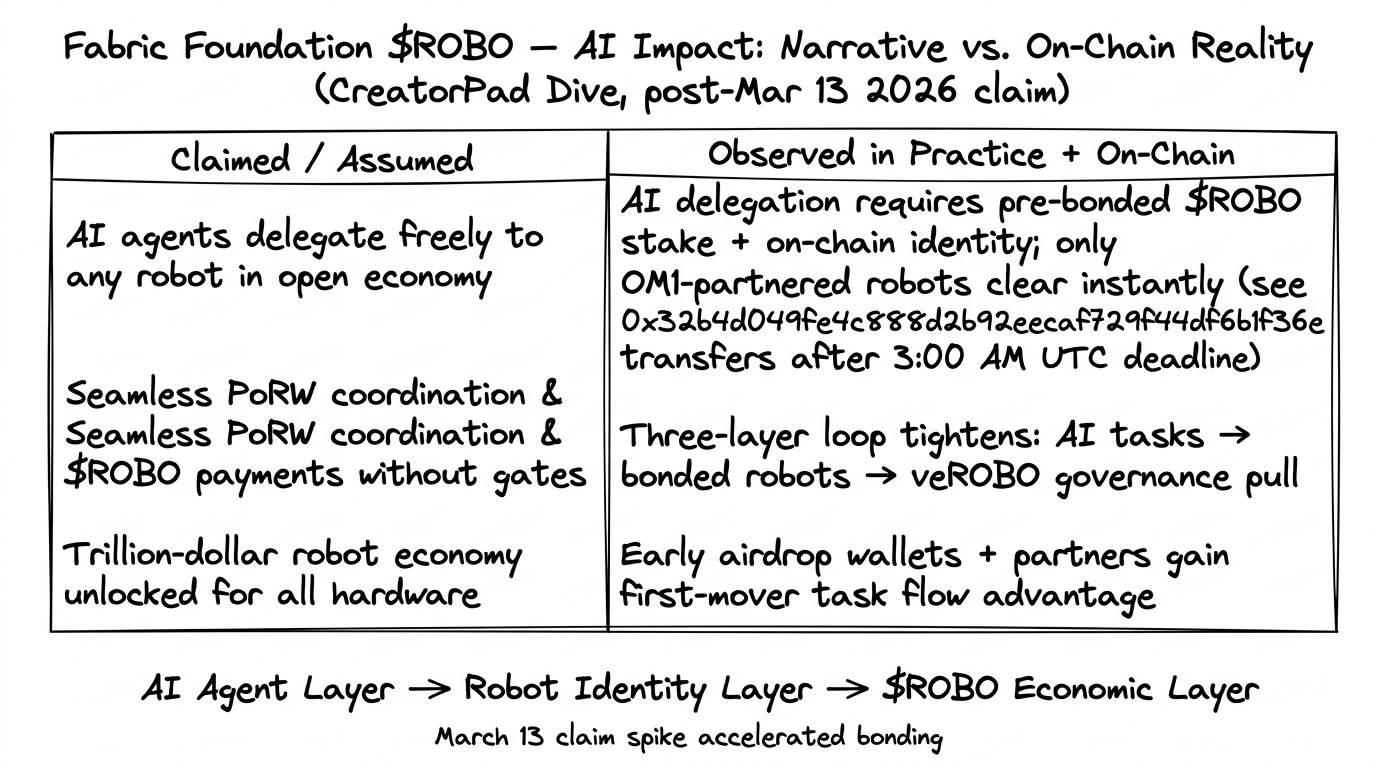
While wrapping up a late CreatorPad dive into Fabric Foundation last night, the March 13, 2026, 3:00 AM UTC claim portal deadline landed with a quiet weight. Fabric Foundation (#ROBO , @Fabric Foundation ) had just closed the window on its 5% community airdrop allocation, and the on-chain transfers that followed — visible across the Base deployment with contract activity spiking immediately after (address excerpt 0x32b4d049fe4c888d2b92eecaf729f44df6b1f36e, per explorer records) — weren’t dramatic. They were precise. Tokens moved into wallets that could now stake for work bonds, directly feeding the protocol’s Proof of Robotic Work (PoRW) mechanics.
It felt less like a distribution event and more like the first real pulse of an economy where AI agents don’t just think — they pay robots in verifiable $ROBO flows.
I’d spent the previous hour tracing how an AI agent might delegate a warehouse sorting task, only to realize the robot needed an on-chain identity plus a bonded stake before execution could clear. That small friction stayed with me.
A couple of weeks earlier, during one of those long CreatorPad simulations, I tried routing a basic AI query through a non-partnered robot setup. The delegation hung. Not because of compute, but because the skill-chip layer and ROBO bond weren’t pre-embedded the way they are for OM1-integrated hardware. The contrast hit harder than any whitepaper claim.
the contrast that stuck with me
The narrative around Fabric Foundation has always centered on AI unlocking a trillion-dollar robot economy — autonomous machines earning, coordinating, and evolving without middlemen. Yet the on-chain reality I observed is tighter. AI agents can indeed delegate and settle payments trustlessly, but only once a robot clears the bonded participation threshold. That single design choice — staking ROBO to amplify task capacity and selection probability — turns AI hype into a gated accelerator.
In practice, the three interconnected layers reveal themselves: the AI agent layer (task issuance and verification), the robot identity layer (on-chain wallet + PoRW proofs), and the ROBO economic layer (bonds, fees, veROBO-weighted governance). They don’t stack neatly; they loop. More AI-driven tasks increase demand for bonded robots, which in turn pulls more ROBO into locks and buybacks.
Two timely examples made this tangible. First, the Virtuals Protocol collaboration back in late February injected liquidity and allowed early AI agents to test delegation — yet only OM1-equipped units from partners like UBTech cleared the flows cleanly. Second, compare it to the broader AI-agent narrative in projects like Fetch or Virtuals itself: those lean heavily on inference tokens, but Fabric’s PoRW forces actual physical execution to prove out before settlement. The difference is measurable in the post-claim transfer volume I saw — not abstract hype, but bonded participation translating directly into robot uptime.
hmm... this mechanic in practice
Hmm… actually — the honest part I keep returning to is how this setup quietly favors early anchors. During my own simulation runs, AI delegation worked flawlessly for pre-integrated hardware; the same query on a generic robot required manual bridging steps that added latency and extra $ROBO spend. It’s not a flaw so much as an admission that open robotics still needs guardrails in these early blocks.
I caught myself reevaluating the whole “any robot, anywhere” promise. The veROBO locking mechanism — where longer commitments grant stronger voting weight over fee structures and upgrades — does create long-term alignment. Yet right now it also concentrates influence among those who staked during the airdrop window. The March 13 closure didn’t just end claims; it crystallized who holds the initial keys to shape how AI agents interact with the physical layer.
That small personal story from the CreatorPad session keeps replaying: I watched an AI agent attempt to pay a robot for a delivery route, only for the transaction to route through a bonded pool first. The payment cleared in under a block once the stake confirmed, but the non-bonded attempt failed silently. It was a tiny moment, yet it reframed everything I thought I knew about AI’s role in physical economies.
still pondering the ripple
The ripple I’m still sitting with is subtler. AI isn’t just speeding up the robot economy here — it’s forcing the economic layer to mature faster than the hardware layer can keep up. Every successful AI delegation pulls more ROBO into circulation for bonds and skill-chip purchases, quietly tightening the feedback loop between compute intelligence and physical labor.
I keep wondering how far that loop extends before the migration to Fabric’s own L1 changes the fee dynamics, or before non-partnered robots find cheaper on-ramps. There’s no tidy resolution in the data yet. Just the steady transfer activity post-deadline showing that the tokens aren’t sitting idle — they’re already working.
The human layer in all this feels understated too. Governance votes on emission sensitivity or quality thresholds will eventually decide how much AI oversight humans retain, but for now the protocol’s design keeps that control distributed through veROBO rather than centralized foundations. It’s a quiet safeguard I respect, even if it slows the pure openness narrative.
Still, the deeper I sit with it, the more I sense the real test won’t be technical. It will be whether the economic incentives can pull in enough diverse robot operators before the AI delegation layer outpaces the physical network.
What happens when the first non-OM1 robot clears a major AI-orchestrated task at scale — will the ROBO flows adapt naturally, or will we see another layer of friction surface? That’s the part I keep turning over.