
He encontrado que la señal más clara de la calidad de la red aparece cuando los incentivos se comprimen. La expansión oculta la fragilidad. La contracción expone la alineación. Cuando las recompensas se normalizan y la volatilidad aumenta, la participación o bien demuestra ser durable o se disuelve. En sistemas de coordinación, especialmente aquellos que interfieren con la robótica física, la disciplina bajo restricción es la única medida confiable de la integridad estructural.
El diseño de ROBO como un protocolo de coordinación robótica descentralizado debe, por lo tanto, evaluarse a través de incentivos, no de ambición. La coordinación robótica introduce latencia en el mundo real, variabilidad de hardware y riesgo de ejecución. Si los validadores y operadores permanecen activos a pesar de la reducción de recompensas marginales, sugiere que están respaldando la utilidad en lugar de extraer emisiones.
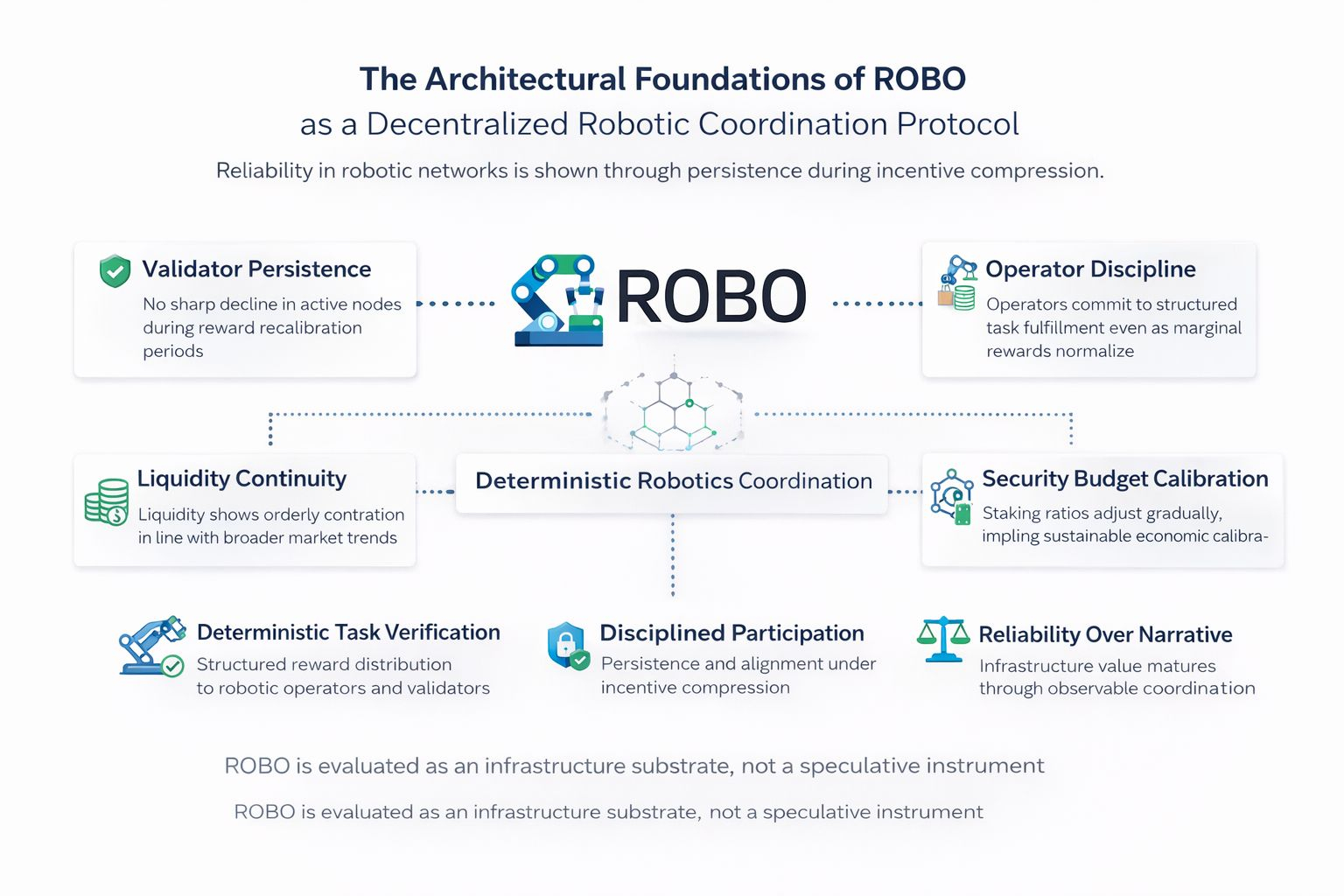
El comportamiento reciente en cadena proporciona señales medibles. La participación de los validadores se ha mantenido constante a través de las ventanas de recalibración de recompensas, sin un declive abrupto en los nodos de coordinación activos. Las proporciones de staking se han ajustado gradualmente en lugar de colapsar en respuesta a la reducción de la emisión. Ese patrón implica modelos de operadores heterogéneos en lugar de salidas sincronizadas. La profundidad de liquidez en los lugares principales se ha contraído en línea con las condiciones del mercado más amplias, pero sin un desequilibrio desordenado o picos persistentes de deslizamiento.
Desde una perspectiva de capital a largo plazo, estos comportamientos implican que el presupuesto de seguridad de ROBO puede calibrarse con relativa disciplina. En redes de coordinación robótica, la fiabilidad es innegociable. Si el tiempo de actividad de los validadores persiste cuando la emisión disminuye, el equilibrio de incentivos de la red puede ser sostenible sin una dilución excesiva. Si la liquidez permanece funcional durante la volatilidad, escalar el volumen futuro de tareas se vuelve operativamente factible. La pregunta clave es simple: ¿se contrae la participación lentamente cuando los incentivos se reducen? Hasta ahora, la evidencia sugiere que sí.
Arquitectónicamente, ROBO parece orientado hacia la verificación de tareas deterministas y la distribución estructurada de recompensas entre operadores robóticos y validadores. Esta alineación reduce la interpretación discrecional en la capa de coordinación. La infraestructura madura cuando se vuelve predecible. La previsibilidad reduce el costo de coordinación. Un costo de coordinación más bajo se acumula con el tiempo.
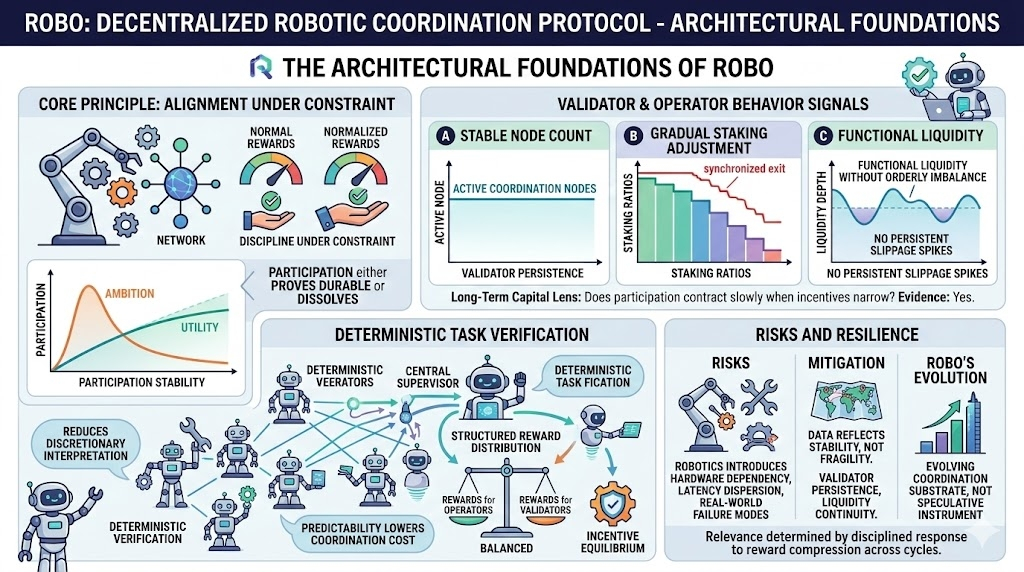
Existen riesgos. La robótica introduce dependencia de hardware, dispersión de latencia geográfica y modos de falla en el mundo real que los sistemas puramente digitales evitan. La mala valoración de incentivos en la capa de validación de tareas podría surgir bajo una expansión sostenida del rendimiento. Sin embargo, los datos de comportamiento actuales reflejan estabilidad en lugar de fragilidad.
Veo a ROBO menos como un instrumento especulativo y más como un sustrato de coordinación en evolución. Su relevancia no será determinada por la aceleración narrativa, sino por la persistencia de los validadores, la continuidad de la liquidez y la respuesta disciplinada a la compresión de recompensas a través de ciclos.
@Fabric Foundation #ROBO $ROBO
