Anoche, cuando pedí comida a domicilio, estuve mirando mi teléfono por un buen rato, no porque estuviera eligiendo qué comer, sino porque estaba observando el pequeño mapa del repartidor. La plataforma muestra mucha información, como la calificación del repartidor, la cantidad de pedidos completados y la eficiencia de entrega.
Ay, hablando de esto, ¿cómo se obtienen exactamente estas calificaciones? ¿Es porque un repartidor tiene una alta calificación porque realmente ha completado muchos pedidos, o es porque a menudo acepta algunos pedidos fáciles, o es que todos los pedidos que entrega son buenos? De repente, mi mente saltó al HGV en el @Fabric Foundation libro blanco.
Al principio, cuando vi esto del HGV, en realidad no le presté mucha atención, es solo un puntaje calculado por el sistema en la red Fabric en función de la actividad de tareas y la situación de ingresos, pero este puntaje puede afectar el peso del robot en la $ROBO red, parece un sistema de desempeño de robots.
Pero luego investigué detenidamente y descubrí que HGV es esencialmente una puntuación de Graph, lo que indica que el sistema no solo considera la cantidad de tareas, sino también la estructura de relaciones entre los robots. Y esto, de hecho, se encuentra justo en el núcleo del problema de la red de tareas #ROBO .

En el diseño de Fabric, la lógica de los robots es en realidad muy simple.
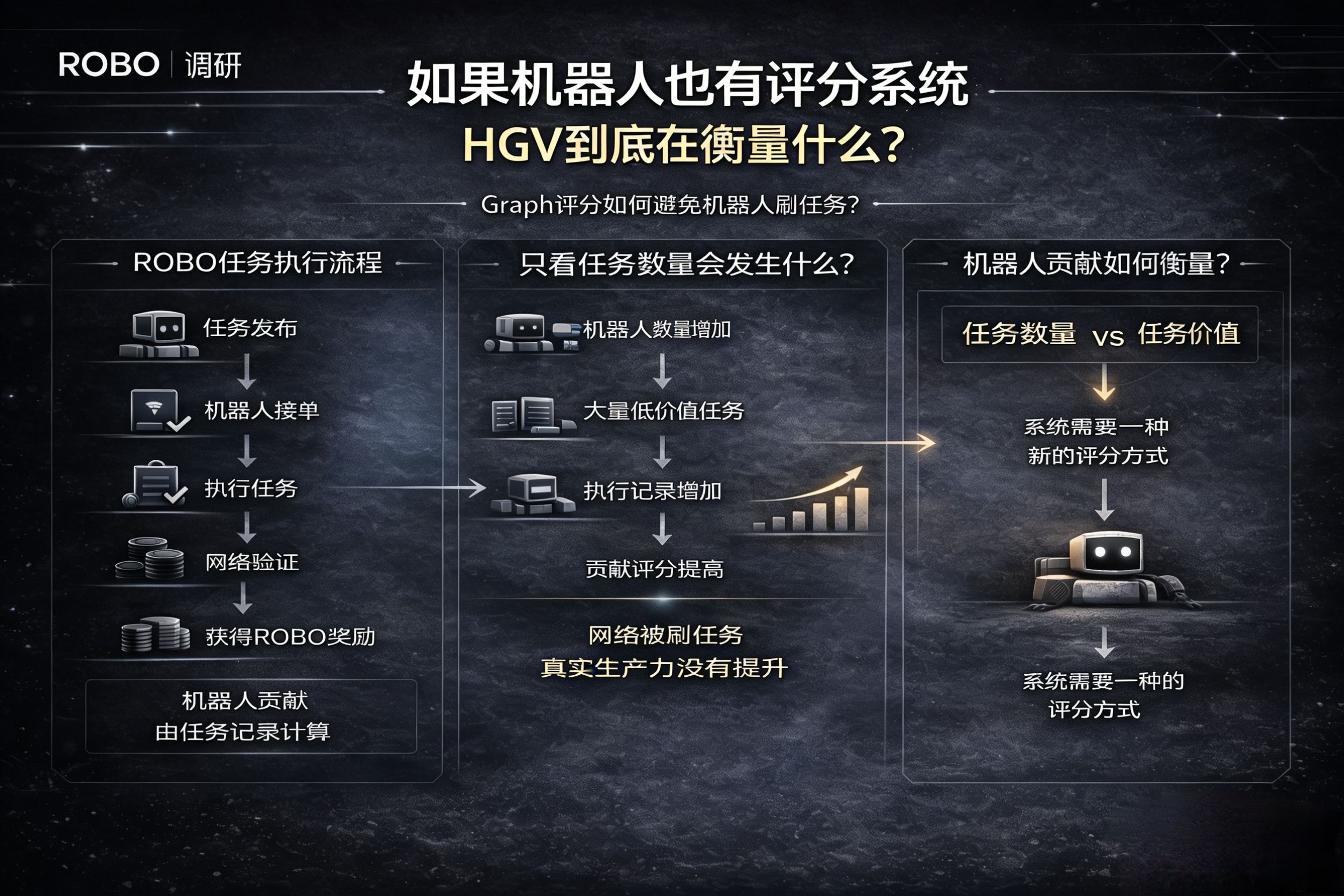
Recibir pedidos → Ejecutar pedidos → Presentar la finalización y cerrar el pedido → Verificación de la plataforma → Liquidación de ROBO
Toda la red es como un sistema automático de asignación de tareas, donde los robots son responsables de realizar las tareas, la red se encarga de confirmar los resultados y luego se liquidan los ROBO según la contribución.
Pero aquí hay un problema: si el sistema solo observa la cantidad de tareas, toda la red puede ser muy fácilmente manipulada. Otros pueden controlar un grupo de robots para que realicen constantemente algunas tareas de bajo valor, de modo que los registros de ejecución en la cadena también se verán muy bien, pero la productividad real y el valor de la contribución pueden no cambiar en absoluto.
Por lo tanto, al diseñar la economía de tareas $ROBO en Fabric, es necesario prestar atención a este problema: ¿qué se considera la verdadera contribución de un robot? Si solo se observa la cantidad de tareas, el sistema es muy fácil de manipular, y si solo se observa el rendimiento, puede ser objeto de manipulación de precios.
Al observar detenidamente, parece que HGV podría resolver este problema, porque una vez que la puntuación se convierte en una estructura de gráfico, no solo observa cuántas tareas se han realizado, sino también la posición dentro de la red de tareas. Así que, si un robot tiene un alto HGV, o realmente es muy diligente recibiendo muchos pedidos y realizando muchas tareas para ganar más ROBO, o aparece con frecuencia en etapas clave de la cadena de tareas, lo que implica que el valor de la tarea es muy alto.
En la red de tareas de ROBO, una tarea compleja generalmente se descompone en múltiples pasos, y si un robot participa con frecuencia en pasos clave, su peso en la red aumentará cada vez más.

El papel de HGV es, en realidad, identificar estos nodos de alto valor que realizan tareas y utilizar el token ROBO como la capa de liquidación económica de este sistema. Si pensamos en toda la red Fabric como una plataforma de ayuda para recibir pedidos de entrega, HGV es un poco como un peso de reputación. Después de que los robots reciben pedidos, realizan tareas y envían registros de ejecución, el sistema no solo debe confirmar si la tarea se ha completado, sino también evaluar el grado de fiabilidad de este nodo en la red. Porque en el diseño de ROBO, los robots no son simplemente herramientas para ejecutar tareas; son más bien estaciones de red que necesitan ser apostadas, recibir pedidos, liquidar y participar en la siguiente ronda de colaboración.
En este momento, la puntuación de HGV en realidad afectará directamente las oportunidades de un robot en esta red. Un HGV más alto significa que el sistema está más dispuesto a asignarle tareas importantes, y también significa que puede obtener más ROBO durante la liquidación de tareas. Con el tiempo, toda la red naturalmente formará que algunos robots solo realicen tareas ocasionalmente, mientras que otros se conviertan lentamente en nodos centrales en la cadena de tareas. Y ROBO aquí no solo es una unidad de liquidación, sino que también actúa como una medida económica para evaluar la contribución y la confianza dentro de esta red de colaboración.
En realidad, aún no he comprendido completamente cuál es la tendencia de diseño de HGV, si el valor del robot se determina por su producción o por su posición en la red. Pero si $ROBO realmente va a convertirse en el activo central de liquidación en la red de tareas de robots, entonces HGV probablemente se convertirá en uno de los parámetros más críticos de todo el sistema.