Me encontré atascado en una pregunta engañosamente simple: ¿cómo puedes verificar realmente que un robot hizo lo que dice que hizo?
No en una demostración pulida. No en un laboratorio controlado. Sino en el mundo real donde los sensores se desvían, las señales caen y los entornos se niegan a comportarse como diagramas ordenados. Ahí es donde la idea detrás del Fabric Protocol comienza a volverse interesante. No intenta construir mejores robots primero. En cambio, cuestiona algo más fundamental: si el trabajo robótico va a escalar a través de sistemas, ¿cómo podemos confiar en ello?
De la Confianza Ciega al Trabajo Verificable
Hoy, la mayoría de los sistemas robóticos operan bajo una confianza implícita. Una máquina completa una tarea, y aceptamos los registros del sistema o la palabra del operador como verdad. Funciona, hasta que no lo hace.
Fabric invierte esa suposición.
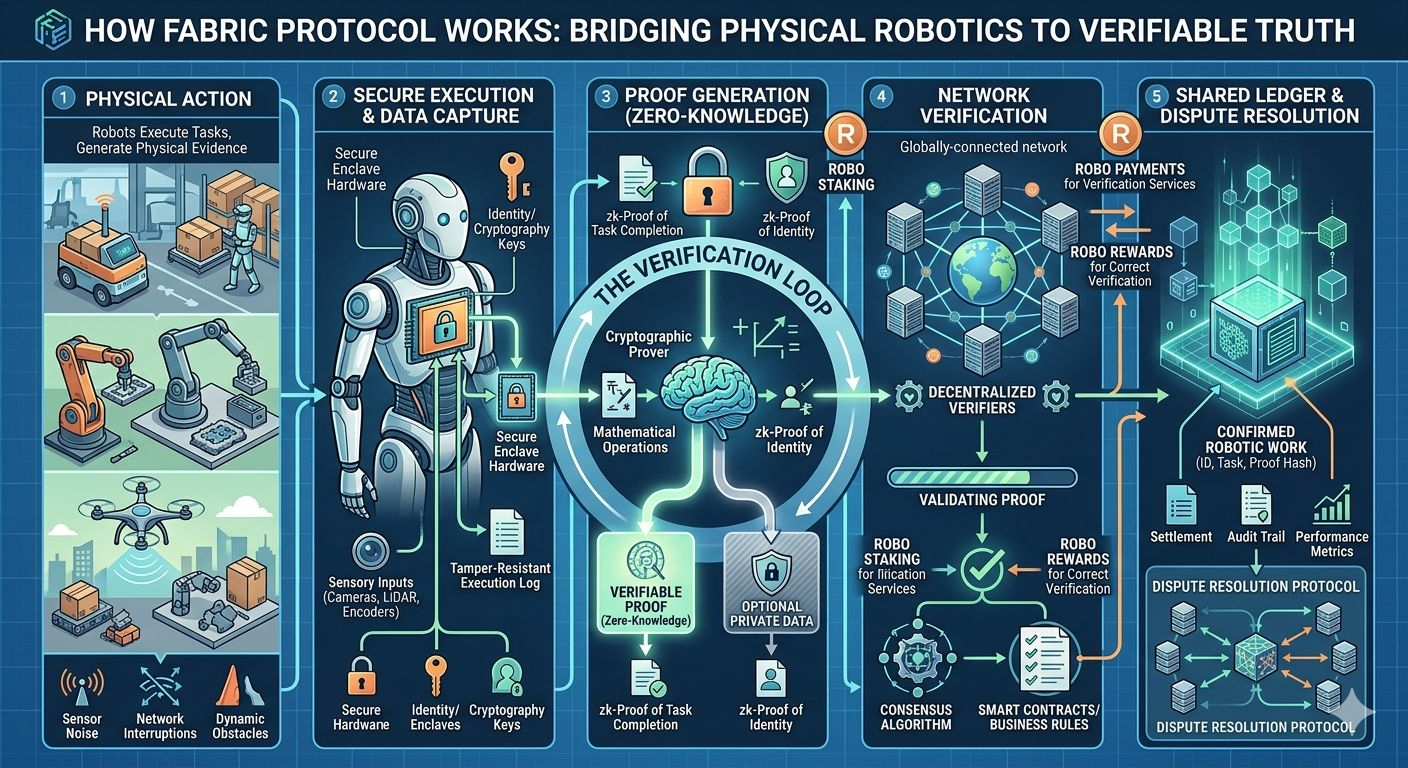
En lugar de depender de sistemas cerrados, introduce pruebas basadas en computación que se registran en un libro mayor compartido. El objetivo no es solo rastrear la actividad, sino hacer que esa actividad sea verificable de manera independiente. Los datos, la computación y los resultados se mueven a través de una infraestructura transparente donde cualquiera puede validar lo que realmente sucedió.
Suena elegante. Tal vez incluso demasiado elegante.
Una Industria Fragmentada Se Encuentra con una Capa Unificada
El problema que está abordando Fabric es muy real. La robótica hoy en día está fragmentada: diferentes proveedores, diferentes estándares, sistemas aislados que rara vez se comunican entre sí. La confianza no viaja bien a través de estas fronteras.
Fabric se posiciona como una capa de coordinación. Los robots no solo ejecutan tareas; se convierten en participantes en una red. Operan con identidad, siguen reglas compartidas y contribuyen a un sistema donde los resultados pueden ser verificados más allá del control de una sola organización.
Este cambio es sutil pero poderoso: de robots como herramientas a robots como actores en red.
Incentivos, No Solo Infraestructura
Ahí es donde entra en juego la idea de ROBO. No como una característica llamativa, sino como un mecanismo para alinear incentivos entre participantes que pueden no confiar entre sí.
En un entorno descentralizado, la verificación por sí sola no es suficiente. Necesitas motivación: razones para que diferentes actores se comporten de manera honesta, contribuyan con datos y validen resultados. ROBO intenta estructurar esa capa, convirtiendo la verificación en algo económicamente significativo.
La Parte Difícil: Uniendo la Verdad Física y Digital
Pero aquí está la tensión que no puedo ignorar.
Convertir acciones físicas en pruebas computacionales confiables es increíblemente difícil.
Un robot moviendo un objeto es directo. ¿Probar que movió el objeto correcto, al lugar correcto, bajo las condiciones correctas? Ese es un desafío completamente diferente. Los sensores pueden fallar. Los datos pueden ser ruidosos. El contexto puede ser ambiguo.
Hay una brecha entre la realidad y la representación, y no es obvio cuán limpiamente se puede cerrar esa brecha.
La Adopción Es la Verdadera Prueba
Incluso si la tecnología funciona, la adopción es otro obstáculo.
Las empresas de robótica ya tienen sistemas que funcionan lo suficientemente bien para sus necesidades. Integrarse en un protocolo compartido y abierto introduce nueva complejidad: técnica, operativa y organizacional. Y en entornos como fábricas o centros logísticos, el margen de error es estrecho.
Un pequeño fallo de verificación no es teórico. Puede significar retrasos, costos y consecuencias en el mundo real.
En Algún Lugar Entre la Visión y la Realidad
¿Entonces, dónde nos deja eso?
La arquitectura de Fabric tiene sentido. El problema que aborda es real. El enfoque es estructurado y reflexivo.
Pero la verdadera pregunta no es si funciona en teoría, sino si se sostiene bajo el peso desordenado e impredecible del mundo real.
Y en este momento, esa respuesta todavía se siente abierta.