Cuando escucho a la gente hablar sobre la gobernanza de la robótica descentralizada, mi primera reacción no es emoción. Es precaución. No porque la idea carezca de ambición, sino porque la robótica siempre ha tenido un problema de gobernanza mucho antes de convertirse en un problema técnico. Las máquinas que se mueven, sienten y actúan en el mundo real inevitablemente plantean preguntas sobre control, responsabilidad y coordinación. El desafío nunca ha sido solo construir robots capaces. El verdadero desafío ha sido decidir quién gobierna lo que esos robots pueden hacer.
La mayoría de los sistemas robóticos hoy en día operan dentro de entornos cerrados donde la gobernanza es centralizada por defecto. Una empresa que despliega las máquinas controla los datos que recopila, define las reglas que sigue y, en última instancia, decide cómo evolucionan esos sistemas. Esto funciona lo suficientemente bien para implementaciones aisladas, pero crea un modelo de confianza estrecho. Si la organización que controla los robots cambia sus prioridades, el marco de gobernanza cambia con ella. La rendición de cuentas se convierte en una política corporativa en lugar de un protocolo compartido.
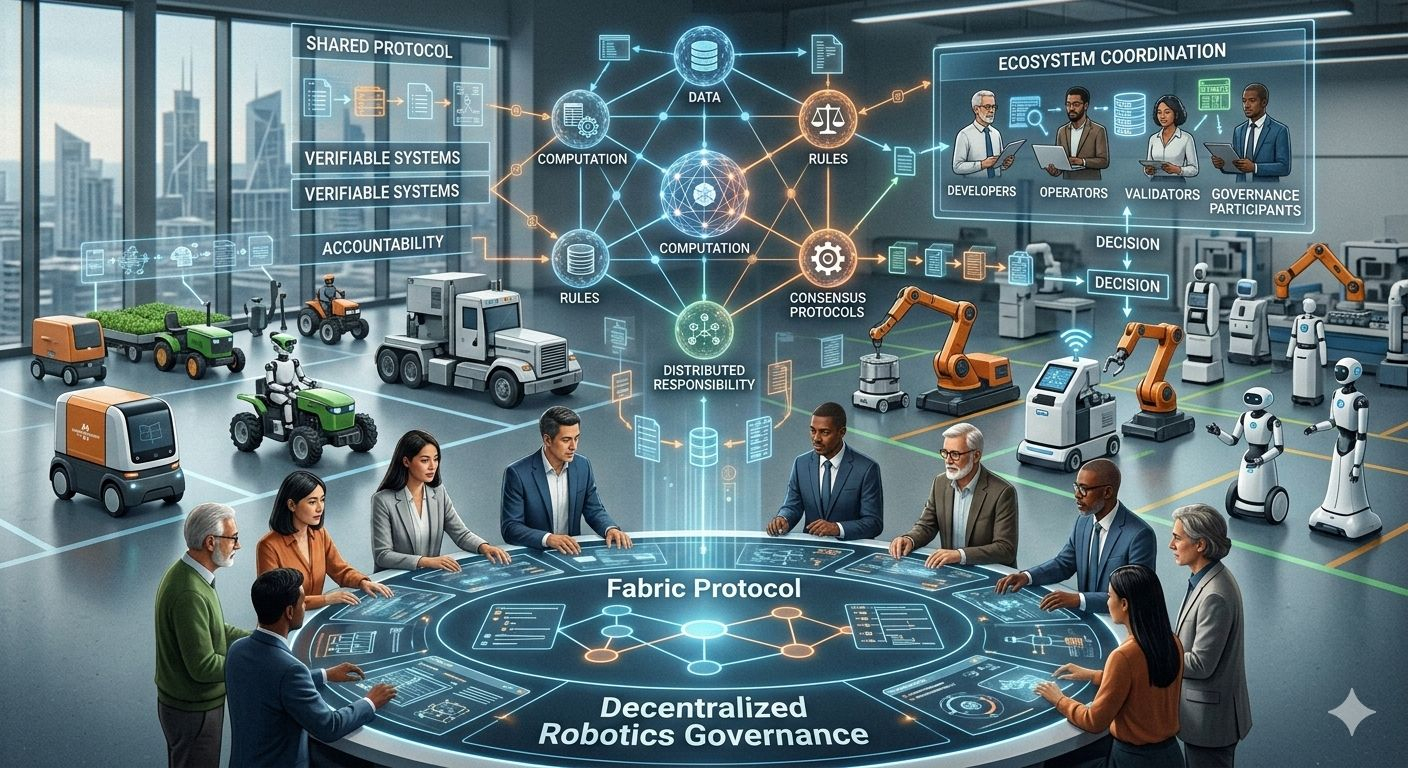
Ese es el contexto donde el Protocolo Fabric comienza a parecerse menos a un marco robótico y más a un cambio de infraestructura. En lugar de tratar la gobernanza como una capa de política interna, la trata como una función de red. Las decisiones sobre el comportamiento de las máquinas, el uso de datos y la verificación computacional pasan de operadores aislados a un entorno compartido coordinado a través de sistemas verificables. La gobernanza se convierte en algo que los participantes pueden observar, auditar e influir en lugar de simplemente aceptar.
Lo importante aquí es que la gobernanza no desaparece cuando se vuelve descentralizada. Simplemente se mueve a una estructura diferente. Si los robots se coordinan a través de una red donde los datos, la computación y las reglas se registran y verifican, entonces el protocolo en sí se convierte en el entorno donde se negocia la autoridad. Los participantes contribuyen con recursos, validan resultados y hacen cumplir políticas a través de una infraestructura compartida en lugar de una supervisión centralizada.
Ese cambio altera quién lleva la responsabilidad por la actividad de las máquinas. En las implementaciones robóticas tradicionales, la organización que opera el sistema posee efectivamente cada capa de control. Definen cómo operan los modelos, cómo se ejecutan las decisiones y cómo se maneja la rendición de cuentas cuando algo falla. En un marco descentralizado, la responsabilidad se distribuye entre un conjunto más amplio de actores. Los desarrolladores construyen los sistemas, los operadores despliegan máquinas, los validadores verifican la computación y los participantes en la gobernanza influyen en las reglas de política.
Una vez que distribuyes la responsabilidad de esa manera, la arquitectura de la confianza cambia. En lugar de confiar en una sola entidad para gestionar el comportamiento de las máquinas, los participantes dependen de la computación verificable y de los libros contables compartidos para confirmar que el trabajo robótico se realizó correctamente. El protocolo se convierte en una capa de coordinación donde las acciones de las máquinas se pueden registrar, evaluar y validar por la propia red.
Eso no significa que la complejidad desaparezca. De hecho, la gobernanza descentralizada a menudo introduce nuevas capas de diseño operativo. Las reglas deben codificarse de maneras que las máquinas y las redes puedan interpretar. Las disputas deben tener caminos de resolución. Los sistemas de verificación deben asegurarse de que el trabajo de las máquinas coincida con lo que el protocolo afirma que realmente sucedió. La gobernanza se convierte en menos sobre la autoridad y más sobre el diseño del sistema.
La parte interesante es cómo este diseño comienza a moldear incentivos. Si el trabajo robótico se vuelve verificable dentro de una red, entonces las contribuciones de las máquinas se pueden medir, coordinar y potencialmente recompensar de maneras que las plataformas robóticas tradicionales rara vez apoyan. Los datos se vuelven más portátiles. La computación se vuelve más transparente. La participación se convierte en algo que puede escalar más allá de los límites de una sola organización.
Eso crea la posibilidad de ecosistemas robóticos en lugar de implementaciones aisladas. Las máquinas construidas por diferentes desarrolladores podrían operar dentro de un entorno de gobernanza compartida donde las reglas se negocian colectivamente. El flujo de datos entre los participantes se da a través de protocolos transparentes en lugar de tuberías propietarias. La red comienza a funcionar menos como una plataforma y más como una capa operativa para la colaboración de máquinas.
Por supuesto, esto también introduce nuevos puntos de falla. Los sistemas de gobernanza pueden volverse lentos, fragmentados o excesivamente complejos si la participación se expande más rápido de lo que evolucionan los mecanismos de coordinación. Las decisiones que antes se tomaban internamente pueden requerir un acuerdo a nivel de red. Las políticas que antes cambiaban rápidamente pueden requerir un consenso deliberado. La misma descentralización que mejora la transparencia puede, a veces, ralentizar la capacidad de respuesta.
Esa tensión es inevitable. Cada sistema descentralizado enfrenta el mismo acto de equilibrio entre apertura y eficiencia. Demasiado control central y el sistema pierde credibilidad como infraestructura compartida. Demasiada fragmentación y la coordinación se vuelve difícil. La verdadera prueba de la gobernanza robótica descentralizada es si los protocolos pueden mantener tanto la confianza como la fiabilidad operativa a medida que la red crece.
Lo que sugiere el Protocolo Fabric es que la robótica puede estar entrando en una fase donde la infraestructura de gobernanza se vuelve tan importante como la capacidad mecánica. Los robots ya poseen una autonomía creciente. Recogen datos, toman decisiones y realizan tareas que influyen en los entornos físicos. A medida que esas capacidades se expanden, los sistemas que rigen su comportamiento se convierten en piezas críticas de la pila tecnológica.
En ese sentido, la gobernanza robótica descentralizada es menos sobre eliminar la autoridad y más sobre reestructurarla. La autoridad se mueve de instituciones a protocolos, de políticas internas a sistemas verificables, de operadores aislados a participantes de la red. El objetivo no es simplemente distribuir el poder, sino hacer que el comportamiento de las máquinas sea observable y responsable dentro de ecosistemas más amplios.
La verdadera pregunta es cómo se comportan estos sistemas de gobernanza una vez que los robots comienzan a operar a gran escala. En redes pequeñas, la coordinación parece manejable. En ecosistemas grandes con miles de máquinas y participantes, la gobernanza se convierte en una negociación continua entre transparencia, eficiencia y seguridad. El valor a largo plazo de protocolos como Fabric dependerá de qué tan bien mantengan ese equilibrio cuando la red deje de ser teórica y comience a gestionar la actividad real de las máquinas.
Así que cuando pienso en la gobernanza robótica descentralizada, no me enfoco inmediatamente en la promesa de la colaboración abierta. Me enfoco en la infraestructura que tiene que apoyarlo. Porque el éxito de este modelo no se determinará por qué tan bien suena la idea en teoría. Se determinará por si los sistemas que coordinan máquinas, datos y decisiones siguen siendo fiables cuando la red se vuelve grande, compleja e impredecible.
@Fabric Foundation $ROBO #ROBO

