Mientras estudiaba robótica submarina recientemente, una cosa quedó clara de inmediato: el océano es uno de los lugares más difíciles para que las máquinas operen, y ese desafío moldea cada elección de diseño.
Los buzos humanos solo pueden permanecer bajo el agua por un corto tiempo, las condiciones en alta mar son arriesgadas y las áreas que necesitan exploración son masivas. Por eso, los científicos están utilizando cada vez más Vehículos Autónomos Submarinos (AUV) y Vehículos Operados Remotamente (ROV). Estos robots van donde los humanos no pueden: realizando investigaciones, inspeccionando infraestructuras submarinas y monitoreando el medio ambiente.
Durante mi investigación, se hizo evidente que estas máquinas generan una enorme cantidad de datos valiosos. Manejarlo de manera eficiente requiere algo más que sistemas tradicionales (una capa de coordinación descentralizada como el ecosistema ROBO)
1) Desafíos de Navegación Submarina/-
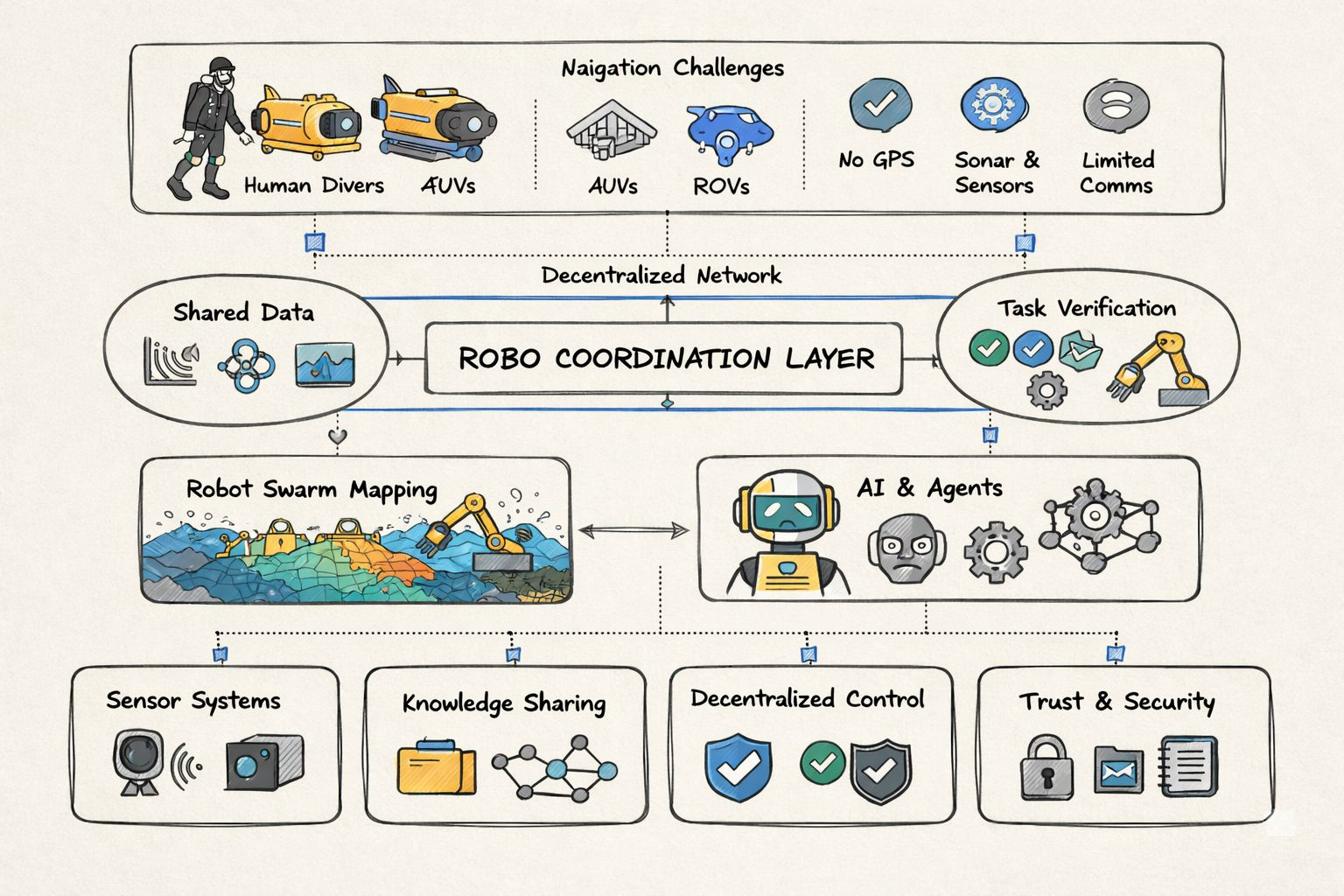
Trabajar debajo del agua introduce otro desafío: la navegación. El GPS no funciona bajo la superficie, la visibilidad a menudo es escasa y el ancho de banda de comunicación es limitado. Los robots dependen de sonar, sensores y algoritmos de navegación para conocer su posición y moverse de forma segura. Por lo que observé, la navegación no se trata solo de precisión técnica; se trata de combinar diferentes señales imperfectas y compartirlas entre máquinas.
Aquí es donde una red descentralizada dentro del ecosistema ROBO se vuelve crucial, permitiendo a los robots compartir datos de sensores de manera segura y entender su entorno colectivamente, incluso sin GPS.
En el ecosistema ROBO, los robots, agentes y sistemas de IA pueden coordinarse a través de una verificación descentralizada, asegurando que las tareas, datos y acciones sean confiables incluso cuando las máquinas operan de forma autónoma.
2) Colaboración Entre Humanos y Robots/-
Trabajar con robots no se trata solo de enviar máquinas al agua y dejarlas moverse por su cuenta.
Lo que más me fascinó durante mi investigación fue ver cómo los humanos y los robots pueden realmente trabajar juntos como un equipo. Los buzos aportan intuición, experiencia y toma de decisiones en fracciones de segundo, mientras que los robots pueden llegar más profundo, sentir más y recolectar datos que los humanos no pueden.
Muchos sistemas ya combinan la guía humana con la percepción robótica, produciendo resultados muy por encima de lo que cualquiera de los dos podría lograr solo.
Pero luego comencé a imaginar lo que sucede cuando docenas de robots operan juntos en la misma área: mapeando regiones oceánicas, inspeccionando tuberías o recolectando datos ambientales al mismo tiempo. Ahí es cuando quedó claro: el desafío ya no se trata solo de navegación o colaboración humano-robot.
En ese momento, me di cuenta de que la verdadera prueba es cómo todas estas máquinas se coordinan entre sí.
3) Ecosistema ROBO en Acción/-
Imagina un grupo de robots submarinos mapeando un arrecife de coral. Un robot detecta una estructura inusual a través del sonar y comparte esa señal con la red. Otros robots cercanos verifican automáticamente la observación desde diferentes ángulos, mientras que otra unidad actualiza el mapa compartido en tiempo real. A través de la verificación descentralizada en el ecosistema ROBO, el sistema puede confirmar descubrimientos sin depender de un solo controlador.
Y esta es exactamente la razón por la que encuentro el ecosistema ROBO tan asombroso. En lugar de depender de un solo controlador, su red descentralizada permite a los robots compartir información, verificar las acciones de cada uno y dividir tareas de manera natural.
De cierta manera, la red en sí misma se convierte en parte del equipo. Cada robot sabe lo que los otros están haciendo, las decisiones se verifican automáticamente, y todo el grupo puede lograr mucho más de lo que cualquier máquina individual podría. Esto ya no es solo robótica; es una economía de máquinas autos organizadas y colaborativas, donde la coordinación y la confiabilidad están integradas en el sistema.
4) Perspectivas de Investigación y el Futuro/-
Desde una perspectiva de investigación, aquí es donde radica el mayor conocimiento. Mi propio estudio sobre sistemas autónomos y robótica submarina destacó una cosa: construir robots capaces es solo la mitad del trabajo. La verdadera innovación proviene de construir redes que permiten a los robots compartir conocimientos, verificar tareas y operar juntos de manera confiable.
Y el ecosistema ROBO está explorando activamente este espacio, mostrando un camino claro hacia operaciones robóticas escalables, descentralizadas y confiables.
Después de profundizar en la robótica submarina, una cosa me quedó clara: construir robots más inteligentes es importante, pero construir sistemas que les permitan confiar, verificar y coordinarse entre sí puede ser aún más relevante.
Esa es exactamente el tipo de futuro que el ecosistema ROBO está comenzando a explorar.
Si las máquinas van a explorar entornos donde los humanos no pueden ir, entonces los sistemas que permiten que esas máquinas coordinen y confíen entre sí pueden convertirse en una de las infraestructuras más importantes del futuro.
@Fabric Foundation #ROBO $ROBO
