I keep coming back to the same idea with Fabric Protocol: robots don’t just need intelligence, they need infrastructure that allows their work to exist inside an open digital economy.
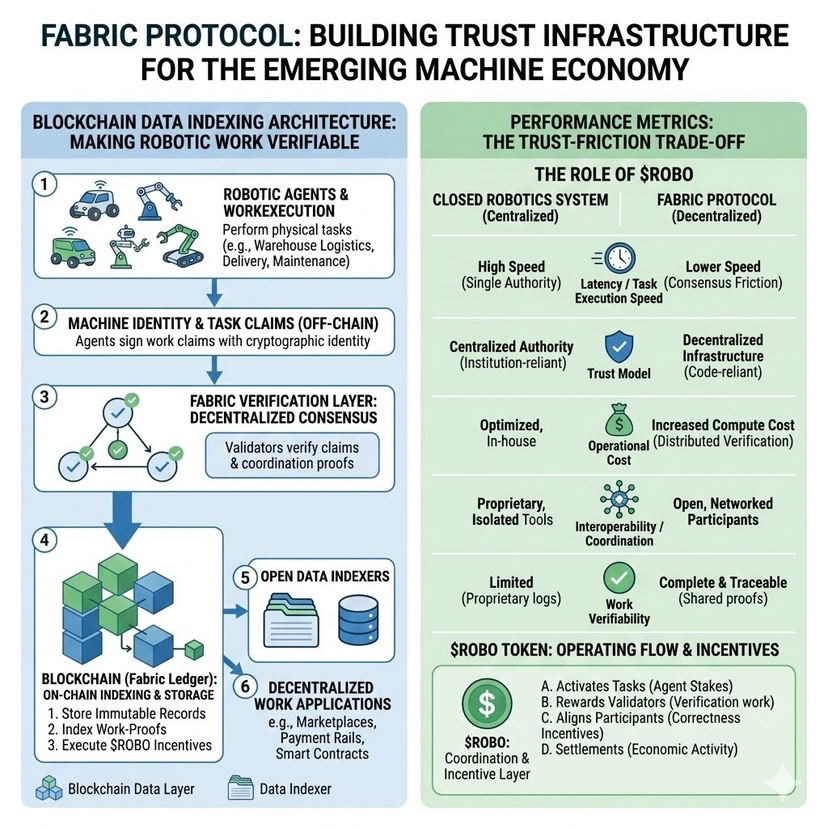
Fabric appears to be exploring that missing layer. The protocol focuses on machine identity, verifiable records of robotic work, coordination between autonomous agents, and payment rails for task execution. Without these components, even highly capable robots remain isolated tools rather than participants in larger systems.
Within that framework, $ROBO functions as the coordination and incentive layer, activating tasks, aligning participants, and rewarding useful machine activity. The token sits inside the operating flow of the network rather than around it.
If machine economies ever emerge, the critical infrastructure may not be the robots themselves, but the systems that make their work verifiable.
The moment that still sticks with me happened in a robotics lab a few years ago. A small autonomous vehicle was moving packages across a warehouse floor with remarkable precision. The machine was clearly intelligent enough to complete its task. But something about the system felt incomplete. The robot could perform work, yet that work only existed inside the software controlling it. Outside that environment, there was no independent way to verify what it had done.
That experience is what comes to mind when I think about Fabric Protocol .The project isn’t really about building smarter robots. It’s about a more structural question: what infrastructure is required for machines to participate in open economic systems? Intelligence alone does not solve that problem. For robots to interact with markets, their work must be identifiable, verifiable, coordinated, and settled.
Fabric appears to be exploring that missing infrastructure layer. Machine identity allows robots to exist as distinct actors within the network. Coordination systems allow multiple agents to interact across shared workflows.
What is easy to miss about this architecture is the shift it implies about trust. Traditional robotics systems rely heavily on centralized control. A company builds the machines, manages the software, and maintains the records of what those machines do. Participants trust the institution operating the system.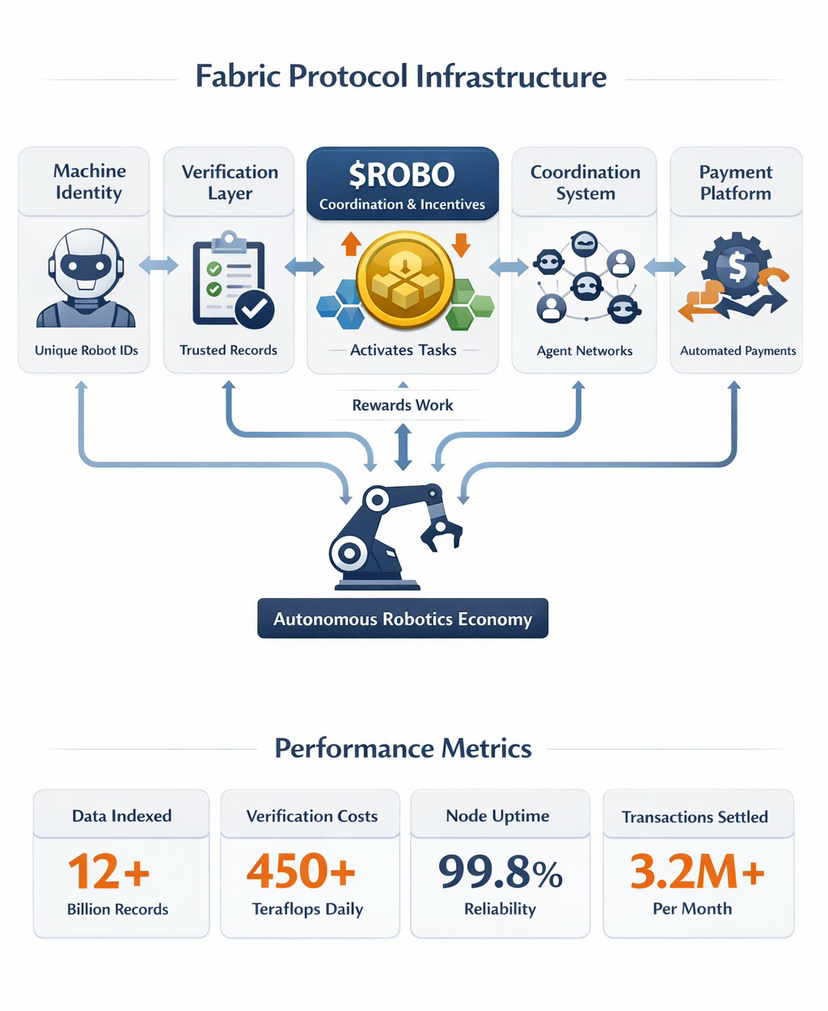
Fabric moves that trust into infrastructure instead. Verification layers and distributed records replace the need for a single authority to confirm machine activity.
Trust infrastructure is expensive.
Every layer of verification requires additional computation, coordination between participants, and mechanisms for maintaining shared records. Compared to closed robotics systems, decentralized verification introduces friction. Fabric’s architecture essentially treats trust as a cost center rather than a default assumption.
At first glance, that may seem inefficient. Closed systems are simpler and faster because one operator controls the entire environment. But the equation changes once robots begin interacting across organizational boundaries. Machines operating inside logistics networks, manufacturing ecosystems, or service marketplaces will inevitably encounter situations where participants cannot rely on a single authority to verify outcomes.
In those environments, the ability to independently confirm machine activity becomes valuable infrastructure.
This is where Fabric’s approach starts to connect with a larger trend sometimes described as the emergence of machine economies. As AI and robotics systems become more capable, machines will increasingly perform tasks that generate measurable economic value. Deliveries, maintenance operations, infrastructure monitoring, and digital services are all examples where autonomous systems can produce work that others depend on.
Once machines begin producing value in this way, the systems coordinating them start to resemble economic networks rather than isolated tools.
History suggests that open networks eventually require shared infrastructure. The internet itself evolved from disconnected private systems into a global network because common protocols allowed participants to interact without centralized coordination.
Fabric appears to be experimenting with whether a similar transformation could occur in robotics. Instead of assuming that robots will always operate inside proprietary platforms, the protocol explores the possibility that machines could eventually interact within shared digital markets.
In that environment, identity frameworks allow machines to exist as economic participants. Verification layers confirm that tasks were actually completed. Coordination mechanisms allow autonomous agents to collaborate across systems. Payment infrastructure ensures that useful machine work can be compensated.
None of these layers are particularly glamorous compared to the robots themselves. But infrastructure rarely is.
The internet’s success was not driven by individual applications alone. It was driven by the protocols that allowed those applications to interact. Fabric is essentially exploring whether robotics may eventually require similar protocols for machine coordination and trust.
Of course, building such infrastructure introduces significant challenges. Verification systems must scale as more machines join the network. Incentive structures must discourage manipulation while rewarding honest participation. Governance mechanisms must evolve as the ecosystem grows.
Adoption is the biggest unknown. Infrastructure projects rarely succeed simply because the architecture is elegant. They succeed when developers and organizations decide the system solves a problem they cannot solve alone.
That remains the real test for Fabric.
If robotics continues to expand inside closed industrial environments, centralized platforms may remain sufficient. But if machines begin operating across networks owned by different organizations, shared verification infrastructure becomes far more valuable.
Fabric’s architecture suggests one possible answer to that problem. It attempts to transform robotic activity into something that can be recorded, verified, and exchanged across open systems.
Whether that model ultimately succeeds is still uncertain.
But the question it raises is important.
As robotics and AI systems become more autonomous, the real challenge may not be building machines capable of performing work.
The challenge may be building systems capable of proving that work can be trusted.
And in systems like this, the infrastructure behind the machines often matters more than the machines themselves.