Most robotics conversations I hear begin with capability. Faster sensors. More dexterous manipulation. Progress is usually framed in terms of what machines can do.
What receives far less attention is how those machines coordinate once they begin interacting with systems outside their own operators.
That question came back to me recently while reviewing several projects attempting to connect robotics infrastructure with crypto networks. Robotics engineering has made steady progress over the past decade. Autonomous warehouse systems move goods with precision. Manufacturing robots handle complex assembly tasks. Experimental delivery robots navigate urban environments.
In most industrial deployments today, robots operate within tightly controlled organizational boundaries. A warehouse operator manages its fleet internally. A logistics firm coordinates its own machines. The data, task assignments, and payment systems all sit inside centralized infrastructure controlled by a single entity.
The system works because authority is clear.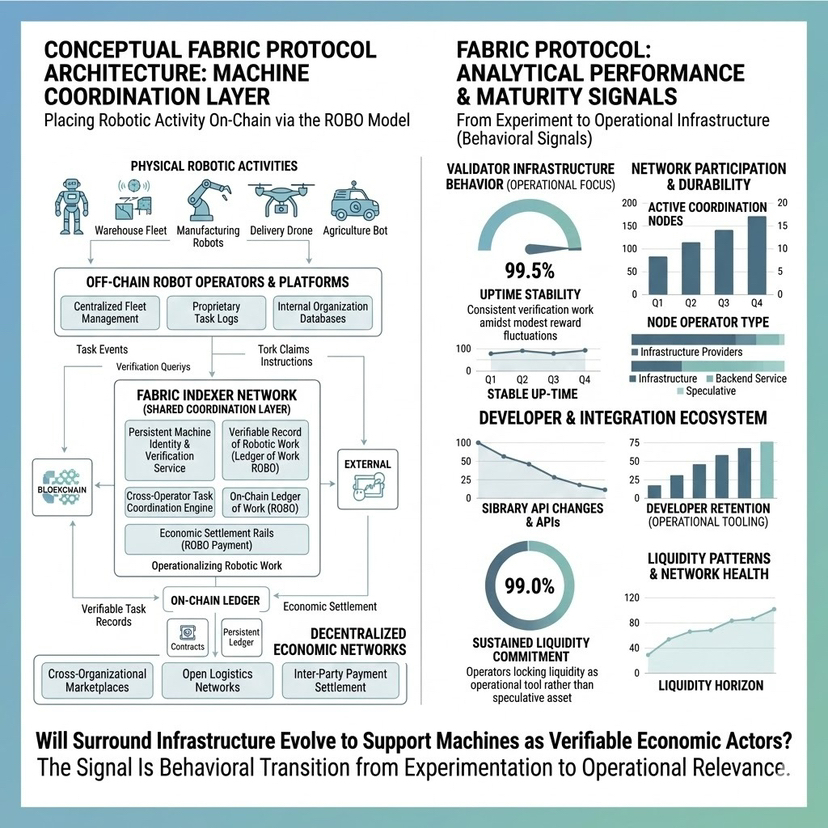
But the moment machines begin interacting across organizations, the coordination problem becomes much more complicated. Identity needs to be verifiable. Task execution needs to be recorded. Work needs to be validated before compensation is issued. Maintenance histories and operational data must remain trustworthy across multiple parties.
They are infrastructure challenges.
This is the layer that Fabric Protocol appears to be exploring.
Rather than attempting to improve robot intelligence itself, @Fabric Foundation focuses on the coordination environment surrounding machine work. The protocol introduces primitives for machine identity, verifiable records of robotic activity, coordination between autonomous systems, and economic settlement for completed tasks.
This architecture becomes particularly relevant once robotic systems from different operators begin to interact.
Imagine a warehouse robot performing work for a logistics platform operated by another company. The robot completes a task. But several questions follow immediately. How is that work verified? Which system records the task execution? Who authorizes the payment? And how can each party trust the integrity of that record?
Today these problems are typically handled through centralized platforms.
#ROBO appears to explore a different approach: a shared coordination layer where machine identities, work records, and settlement logic operate inside a verifiable network rather than a proprietary database.
What makes this direction interesting is how little attention the coordination layer currently receives from robotics markets.
Most investment narratives around robotics concentrate on hardware manufacturers or AI software improvements. Both are important. But the economic infrastructure that allows machines to coordinate work across organizations remains relatively underdeveloped.
That gap creates what might be described as a market blind spot.
If autonomous systems eventually perform economically meaningful tasks across distributed environments, the infrastructure responsible for verifying and coordinating that work becomes critical. Without reliable coordination mechanisms, even highly capable robots remain confined to closed systems.
Fabric appears to position itself within that missing layer.
From an analytical perspective, the durability of such a system will not be determined by its concept alone. Infrastructure networks reveal their strength through behavioral patterns rather than announcements.
Libraries stabilize. APIs mature. Developers begin treating identity verification and task validation as standard components rather than experimental features.
Another signal appears in network participation.
Validator infrastructure maintaining stable uptime despite modest reward fluctuations often suggests that operators view the network as operational infrastructure rather than short-term yield. Nodes responsible for validating machine activity must behave more like backend service providers than speculative participants.
Incentive structures play an important role in shaping that behavior.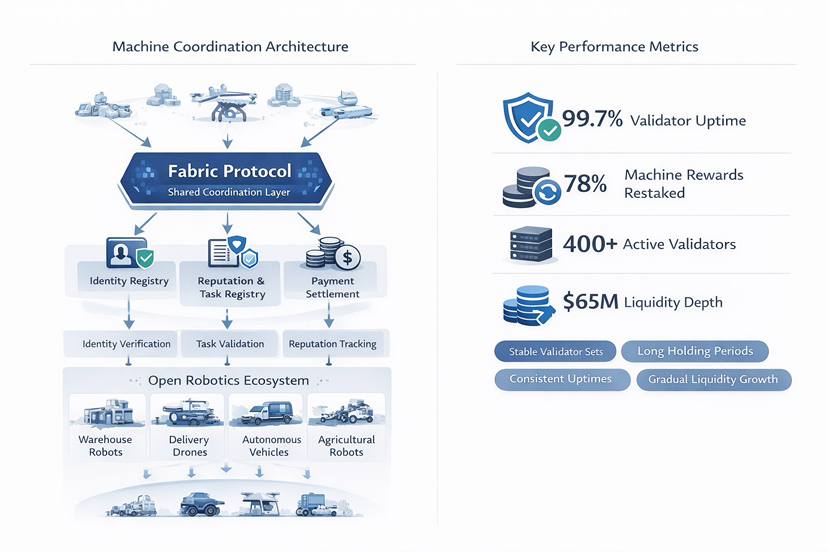
If rewards are designed around verifying machine outputs, recording task completion, or maintaining coordination infrastructure, participants reveal whether they see long-term value in the system. Opportunistic actors tend to move quickly when reward structures change. Infrastructure operators typically behave differently. They optimize for consistency because external workflows begin depending on their reliability.
Liquidity patterns can provide another window into network health.
None of these signals guarantee success. But they often reveal whether a network is transitioning from experimentation toward operational relevance.
Fabric’s focus on machine coordination introduces a broader question about how autonomous systems will participate in future economic systems.
Machines are becoming increasingly capable of performing tasks that carry economic value. Warehouse logistics, delivery systems, industrial maintenance, agricultural automation. Each of these environments involves work that can be measured, validated, and compensated.
But the infrastructure responsible for coordinating that work across independent actors remains fragmented.
If machines begin operating across open environments rather than within single organizations, coordination layers may become as important as the machines themselves. Identity verification, task validation, reputation tracking, and payment settlement all become necessary components of machine economies.
Fabric appears to treat these components as programmable infrastructure.
Whether the robotics industry ultimately adopts such coordination layers remains uncertain. Enterprises may continue relying on centralized orchestration systems. Robotics adoption may progress slower than anticipated. Regulatory frameworks may reshape how autonomous machines participate in economic networks.
Infrastructure projects often face long timelines before their necessity becomes obvious.
Robotics capability continues to advance. Autonomous systems are gradually entering real economic environments. Yet the mechanisms required to coordinate machine work across organizations remain fragmented and inconsistent.
If the robotics industry eventually reaches a stage where machines interact economically across open networks, coordination layers could become foundational.
The more interesting question may not be whether robots become more capable. That trajectory already appears underway.
The more difficult question is whether the surrounding infrastructure evolves to support machines participating in economic systems as verifiable actors rather than isolated tools.
Will robotics ecosystems eventually require neutral coordination layers the way the internet required neutral communication protocols?
It is difficult to answer today.
But markets often overlook infrastructure during early stages of technological shifts. Hardware captures attention. Applications capture headlines. Coordination systems develop quietly in the background.
And by the time those systems become indispensable, the market usually realizes their importance much later than the infrastructure builders themselves.
#TRUMP #Write2Earn #Binance #btc
