Cuando escucho a la gente hablar sobre la innovación robótica abierta, mi primera reacción no es la emoción por las nuevas máquinas o demostraciones de automatización realizando tareas complejas, sino la curiosidad sobre la infraestructura que hace posible esas máquinas en primer lugar, porque la robótica no se vuelve realmente abierta simplemente publicando diseños o permitiendo que los desarrolladores construyan aplicaciones, se vuelve abierta solo cuando la coordinación subyacente de datos, computación, propiedad y gobernanza está estructurada de manera que múltiples participantes puedan contribuir y beneficiarse sin depender de una sola autoridad central para definir las reglas.

Durante años, la industria de la robótica ha operado dentro de un modelo donde la innovación es técnicamente impresionante pero estructuralmente cerrada, lo que significa que las empresas construyen sistemas robóticos potentes, pero los datos que generan, los algoritmos que los guían y el valor económico que producen permanecen bloqueados dentro de ecosistemas propietarios que limitan la colaboración y previenen que las comunidades de investigación y desarrollo más amplias participen en la evolución de la tecnología. Este arreglo ha producido máquinas notables, pero también ha creado un entorno donde el progreso depende en gran medida de los recursos y prioridades de unas pocas organizaciones en lugar de la inteligencia colectiva de una red global.
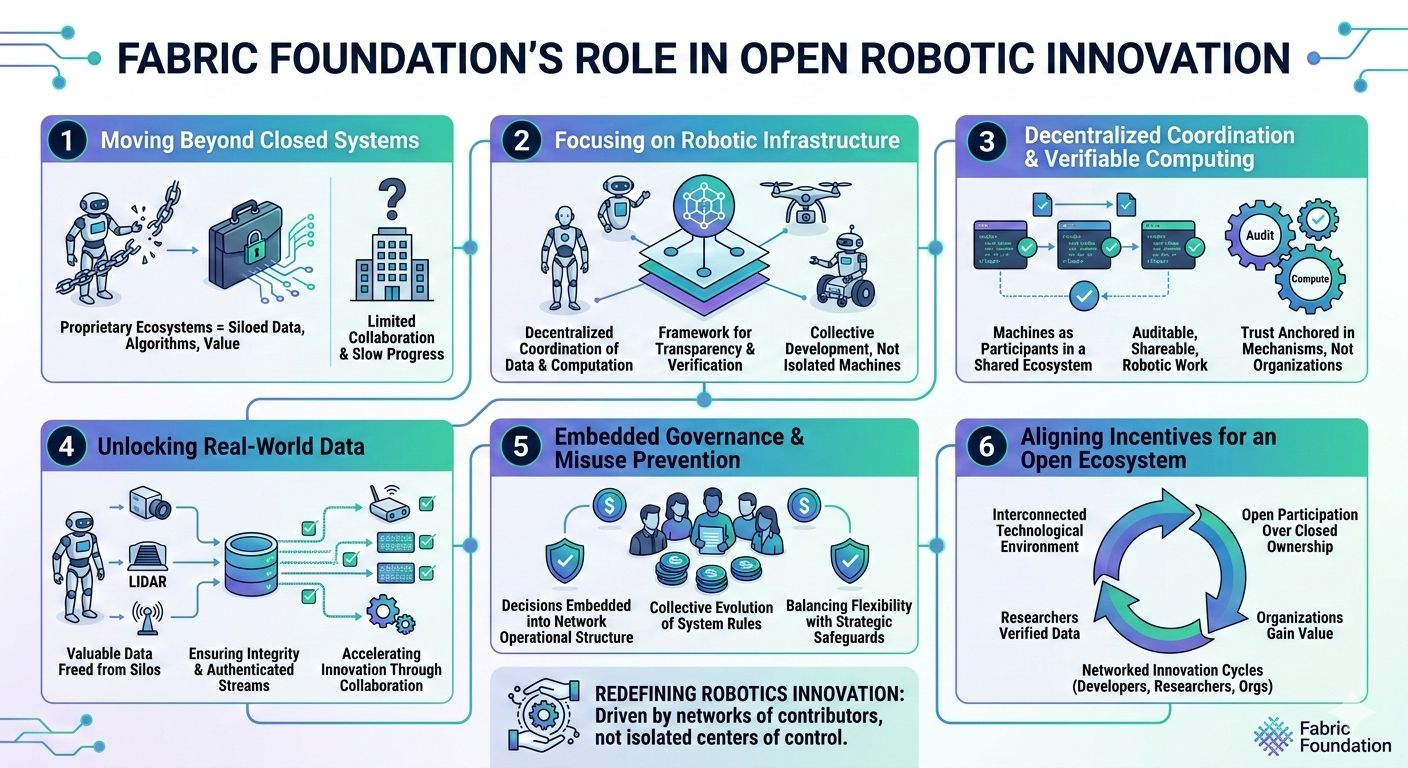
La conversación sobre la innovación robótica abierta, por lo tanto, se vuelve mucho más significativa cuando el enfoque cambia de robots individuales a los sistemas que permiten que esos robots coordinen el trabajo, compartan datos verificables y evolucionen a través de la colaboración en lugar de la aislamiento. Aquí es donde el enfoque de infraestructura introducido por la Fundación Fabric comienza a cambiar el panorama, no construyendo un tipo único de robot o promoviendo un diseño de hardware específico, sino creando un marco de red donde los sistemas robóticos pueden operar como participantes en un ecosistema tecnológico compartido que valora la transparencia, la verificación y el desarrollo colectivo.
En arquitecturas de robótica tradicionales, cada máquina funciona en gran medida como una unidad autónoma controlada por la organización que la posee, y aunque estos sistemas pueden intercambiar información a través de APIs o servicios en la nube, la estructura fundamental sigue siendo centralizada, lo que significa que la confianza en el sistema depende en última instancia de confiar en la organización que opera la infraestructura. Este arreglo funciona para muchos casos de uso industrial, pero se vuelve limitante cuando la robótica comienza a expandirse a aplicaciones sociales más amplias donde las máquinas interactúan con diversos interesados, contribuyen con datos a entornos compartidos y participan en flujos de trabajo colaborativos que se extienden más allá de los límites operativos de una sola empresa.
El modelo de infraestructura desarrollado por Fabric introduce una forma diferente de pensar sobre la coordinación robótica, una donde las máquinas no son meramente dispositivos que ejecutan instrucciones aisladas, sino participantes en una red distribuida donde sus acciones, cálculos y salidas de datos pueden ser verificadas a través de mecanismos transparentes en lugar de simplemente confiarse porque provienen de una organización específica. Al combinar la coordinación descentralizada con principios de computación verificable, el protocolo permite una estructura en la que el trabajo robótico se vuelve auditable, compartible e interoperable entre diferentes operadores, desarrolladores y grupos de investigación.
Una vez que la robótica comienza a operar dentro de ese tipo de entorno, las implicaciones se extienden mucho más allá del diseño técnico de máquinas individuales, porque la innovación abierta no se trata solo de quién puede construir robots, sino también de quién puede acceder al conocimiento generado por la actividad robótica y cómo ese conocimiento contribuye a la evolución del ecosistema. Los datos recopilados por máquinas que realizan tareas en el mundo real representan uno de los recursos más valiosos en el desarrollo de la robótica, sin embargo, en los modelos tradicionales, estos datos a menudo permanecen aislados, impidiendo que investigadores y desarrolladores se basen en ellos de maneras que podrían acelerar el progreso en todo el campo.
La introducción de la coordinación de datos verificables a través de una capa de infraestructura cambia esa dinámica al permitir que los sistemas robóticos contribuyan con información a redes compartidas mientras mantienen mecanismos de autenticación y responsabilidad, asegurando que los participantes puedan confiar en la integridad de la información sin necesidad de confiar en la entidad que la generó originalmente. En este entorno, la innovación se vuelve menos dependiente de avances aislados y más dependiente de la colaboración acumulativa, donde las mejoras realizadas por un participante pueden informar el trabajo de otros a través de la red.
Sin embargo, crear un marco para la innovación robótica abierta también introduce nuevas preguntas sobre gobernanza y responsabilidad, porque una vez que las máquinas comienzan a contribuir con datos y ejecutar tareas dentro de una infraestructura compartida, se vuelve necesario determinar cómo se toman las decisiones sobre las reglas del sistema, permisos de acceso y estándares operativos. Por lo tanto, la capa de gobernanza se vuelve tan importante como la infraestructura computacional misma, ya que el éxito a largo plazo de un ecosistema abierto depende de equilibrar la flexibilidad para los desarrolladores con salvaguardias que prevengan el uso indebido o la inestabilidad dentro de la red.
Esta es otra dimensión donde la arquitectura apoyada por Fabric se vuelve estratégicamente significativa, porque el protocolo no trata la gobernanza como un pensamiento posterior, sino que la integra directamente en la infraestructura que coordina la actividad de las máquinas. Al incrustar marcos de toma de decisiones en la estructura operativa de la red, el ecosistema puede evolucionar colectivamente en lugar de depender de una sola autoridad para dictar la dirección del desarrollo.
Desde una perspectiva más amplia, el aspecto más interesante de este enfoque no es simplemente que los robots pueden compartir datos o coordinar tareas a través de una red descentralizada, sino que los incentivos económicos y tecnológicos dentro del sistema comienzan a alinearse con la participación abierta en lugar de la propiedad cerrada. Los desarrolladores obtienen la capacidad de construir aplicaciones que interactúan con una red de máquinas en lugar de la plataforma de un único proveedor, los investigadores obtienen acceso a datos verificables que respaldan la experimentación y el descubrimiento, y las organizaciones que despliegan robots obtienen un marco donde sus contribuciones pueden generar valor más allá de la tarea inmediata que esos máquinas realizan.
Este cambio en los incentivos transforma gradualmente la robótica de una colección de sistemas aislados a un entorno tecnológico interconectado donde máquinas, desarrolladores y organizaciones contribuyen a un ciclo de innovación compartido. En lugar de que cada nueva generación de robots surja de laboratorios corporativos separados, las mejoras pueden propagarse a través del ecosistema de maneras que aceleran el progreso mientras mantienen la transparencia sobre cómo se implementan esas mejoras.
Por supuesto, la efectividad de esta visión depende en última instancia de cuán bien se desempeña la infraestructura cuando el ecosistema crece en escala y complejidad, porque los sistemas abiertos deben ser resilientes no solo en períodos de desarrollo rápido, sino también durante momentos en que intereses en competencia, desafíos técnicos o comportamientos inesperados ponen a prueba la estabilidad de la red. Los marcos de coordinación que parecen elegantes en teoría deben demostrar que pueden mantener la fiabilidad, la responsabilidad y la seguridad incluso a medida que la participación se expande y el volumen de datos generados por máquinas aumenta drásticamente.
Por eso, el papel de los proveedores de infraestructura en la innovación robótica abierta es mucho más significativo de lo que podría parecer inicialmente, ya que son responsables de garantizar que los mecanismos que permiten la colaboración no introduzcan vulnerabilidades que socaven la confianza en el sistema. Si la verificación falla, la gobernanza se vuelve ineficaz o la coordinación se descompone bajo presión, la promesa de la robótica abierta podría volver fácilmente al modelo familiar de plataformas propietarias aisladas.
Visto desde esta perspectiva, la verdadera importancia del enfoque de Fabric radica no en promover una categoría específica de robots o aplicaciones, sino en establecer las condiciones estructurales que permiten que la robótica evolucione como un dominio tecnológico verdaderamente colaborativo en lugar de una colección fragmentada de sistemas independientes. Al crear una infraestructura que conecta máquinas, desarrolladores y organizaciones a través de la computación verificable y la coordinación descentralizada, la fundación está intentando redefinir cómo ocurre la innovación dentro de uno de los campos tecnológicos más transformadores de la era moderna.
La importancia a largo plazo de ese esfuerzo se medirá en última instancia no por el número de robots conectados a la red en el corto plazo, sino por si el ecosistema tiene éxito en demostrar que la infraestructura abierta puede apoyar la colaboración confiable, segura y escalable entre máquinas que operan en el mundo real. Si se logra ese resultado, entonces el significado de la innovación robótica abierta cambiará de un ideal abstracto a una realidad práctica donde la evolución de la robótica es impulsada por redes de contribuyentes en lugar de centros de control aislados.
@Fabric Foundation #ROBO $ROBO



