
@Fabric Foundation Los sistemas robóticos en entornos profesionales rara vez parecen dramáticos. En una pantalla de monitoreo, aparecen como máquinas en movimientos silenciosos reportando actualizaciones de ubicación, finalizaciones de tareas, niveles de batería. En un almacén, una flota de robots podría estar moviéndose toda la noche, transportando mercancías entre estaciones mientras los operadores echan un vistazo ocasional a los tableros que confirman que todo sigue funcionando. La parte interesante no siempre son las máquinas en sí. Es la capa debajo de ellas, los sistemas que registran silenciosamente lo que esas máquinas hicieron y si alguien puede confiar en el registro.
Una vez que empiezas a notar esa capa, la conversación en torno a la robótica comienza a cambiar ligeramente. Un robot moviendo una caja de un estante a otro no solo está realizando una tarea física. Está produciendo información sobre esa tarea: cuándo ocurrió, cómo ocurrió, si el resultado puede ser verificado. Ese dato importa porque en el momento en que las máquinas operan dentro de redes logísticas, sistemas de inspección o monitoreo de infraestructura, sus acciones comienzan a parecerse a algo más cercano a la actividad económica.
A primera vista, el problema parece simple. Construir robots capaces de realizar trabajo útil y conectarlos a software que coordine su comportamiento. Pero el problema más profundo suele estar en otro lugar. En el momento en que un robot realiza una tarea de la que dependen otras personas, alguien tiene que verificar que la tarea realmente ocurrió de la manera en que la máquina informa que lo hizo.
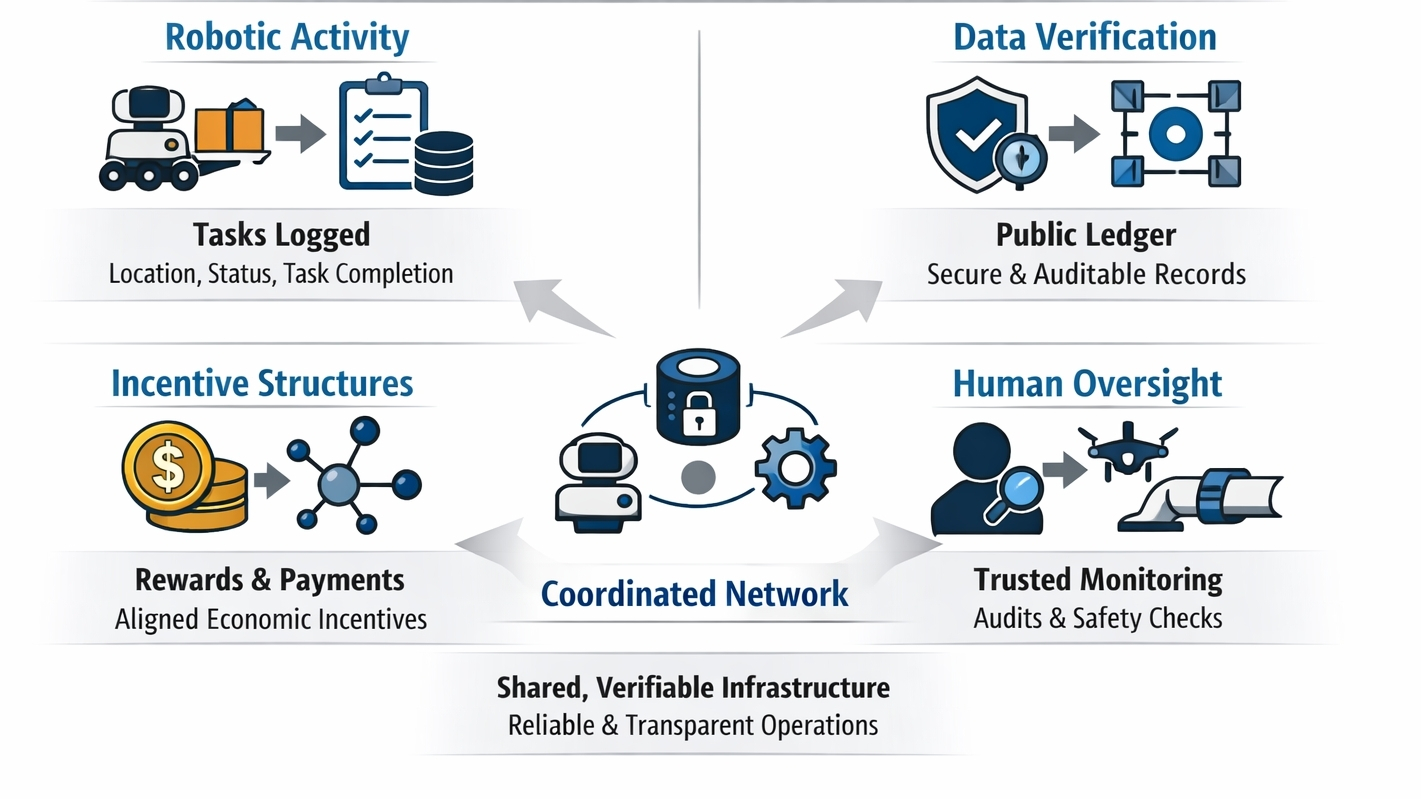
Aquí es donde algunos de los experimentos de infraestructura más silenciosos en torno a la robótica se vuelven interesantes. Fabric Protocol, apoyado por la organización sin fines de lucro Fabric Foundation, aborda la robótica menos como un problema de hardware y más como un problema de coordinación. El sistema utiliza un libro mayor público y una infraestructura de computación verificable para coordinar cómo las máquinas, los datos y la gobernanza interactúan. En otras palabras, intenta registrar no solo lo que los robots afirman hacer, sino cómo esas afirmaciones pueden ser verificadas a través de una red compartida.
Esa distinción puede sonar sutil, aunque se vuelve importante rápidamente. Imagina un robot inspeccionando una tubería o evaluando daños en la infraestructura después de una tormenta. La máquina física recopila datos, pero el valor de esos datos depende de si otros pueden confiar en el proceso que los produjo. El enfoque de Fabric trata esa capa de verificación casi como infraestructura pública, un entorno donde robots, servicios y operadores humanos pueden hacer referencia a un registro compartido de actividades.
Aun así, la idea plantea tantas preguntas como respuestas. El hardware de robótica es impredecible. Los sensores se desvían. Las piezas mecánicas se desgastan. Incluso algo tan simple como la conectividad puede interrumpir un sistema que, de otro modo, parece autónomo. Un robot podría realizar una tarea correctamente pero no informar de ella porque la conexión de red desapareció en el momento equivocado.
Luego están los incentivos. Una vez que las máquinas comienzan a interactuar con sistemas que se asemejan a redes económicas, los pagos, recompensas o coordinación tokenizada, diseñar una participación justa se complica. Si los robots están generando datos valiosos o realizando tareas dentro de sistemas compartidos, alguien inevitablemente intentará manipular las reglas. La infraestructura que registra la actividad robótica tiene que asumir esa posibilidad desde el principio.
También existe la dimensión humana. La mayoría de las personas aún se están ajustando a la presencia de máquinas autónomas en espacios ordinarios. Robots de entrega en las aceras, flotas de almacén operando sin supervisión directa, drones de inspección reportando datos de infraestructura. Multiplica esos sistemas a través de ciudades e industrias y el problema de coordinación crece rápidamente.
La propuesta de Fabric parece sugerir que la robótica dependerá menos de las máquinas en sí y más de las redes que las rodean. Motores y sensores permiten que los robots se muevan y observen el mundo. La infraestructura determina si esas observaciones se convierten en señales confiables dentro de sistemas más grandes.
Observando un panel de robótica tarde en la noche, las máquinas se mueven silenciosamente a través de sus tareas asignadas, se vuelve claro cuán sutil puede ser este cambio. Los robots pueden eventualmente participar en sistemas económicos no porque de repente se vuelvan inteligentes, sino porque la infraestructura a su alrededor aprende a registrar, verificar y coordinar su actividad.
La pregunta más difícil podría no ser si los robots pueden trabajar dentro de la economía. Podría ser si nuestras redes, instituciones y sistemas de verificación están preparados para tratar a las máquinas como participantes una vez que lo hagan.
