Me acerqué a Fabric Protocol con el tipo de escepticismo que se ha vuelto casi automático en los círculos tecnológicos centrados en la infraestructura. En los últimos años, he leído demasiadas afirmaciones ambiciosas sobre sistemas que prometían reinventar la coordinación, la confianza, la autonomía o la inteligencia de las máquinas, solo para descubrir que bajo el lenguaje había una delgada capa de novedad técnica envuelta en una antigua confusión. Muchos de estos proyectos parecían menos interesados en resolver problemas reales de coordinación que en encontrar nuevas superficies a las que se pudiera adjuntar un token, un mecanismo de gobernanza o una narrativa de descentralización. La robótica, en particular, ha sufrido de esta tendencia. Es un campo basado en la fricción, el costo, la seguridad, el mantenimiento y la regulación, sin embargo, a menudo se discute como si las abstracciones elegantes por sí solas pudieran disolver las obstinadas realidades del hardware y el riesgo humano.

Ese fue mi punto de partida con Fabric Protocol. En el primer encuentro, sonó como otro intento de reunir varios conceptos de moda—robots, sistemas verificables, libros de contabilidad públicos, infraestructura de agentes, gobernanza colaborativa—en una sola arquitectura y declarar que el futuro había llegado. He llegado a ser cauteloso con los proyectos que usan un lenguaje grandilocuente para describir la coordinación a escala planetaria antes de que puedan explicar cómo funciona la responsabilidad a nivel de una máquina, un operador, una acción fallida. La robótica de propósito general ya es un área propensa a expectativas infladas. Agregar infraestructura adyacente a cripto o gobernanza descentralizada a la mezcla, y el riesgo de sobreextensión conceptual crece rápidamente.
Lo que cambió mi opinión no fue la amplitud de la visión, sino la premisa subyacente de que el problema difícil no es simplemente hacer que los robots sean más capaces. Es hacerlos legibles, gobernables e interoperables dentro de sistemas compartidos de confianza. Esa distinción importa. Una gran cantidad de trabajo técnico en robótica se centra, comprensiblemente, en percepción, navegación, manipulación, autonomía y control. Pero una vez que las máquinas comienzan a operar entre organizaciones, jurisdicciones, pilas de software y entornos humanos, la capacidad es solo una capa del problema. El desafío más profundo es institucional: ¿cómo coordinan múltiples actores el comportamiento, permisos, actualizaciones, responsabilidades y rutas de decisión de máquinas que ya no son productos aislados sino participantes en una red operativa más amplia?
Fabric Protocol se vuelve más interesante cuando se ve desde ese ángulo. Su importancia, si demuestra ser duradera, radica menos en la idea de robots conectados a una red y más en el intento de crear una capa de coordinación verificable para la actividad de las máquinas. Esa es una ambición más seria de lo que parece a primera vista. En la mayoría de los sistemas robóticos hoy en día, la procedencia de los datos, la historia de acciones, las dependencias de software, los derechos de acceso y las decisiones de gobernanza están fragmentadas a través de pilas privadas. Un robot puede estar físicamente presente en un almacén, hospital o corredor de logística, pero la estructura de responsabilidad que lo rodea es a menudo opaca, distribuida entre proveedores, operadores, integradores, aseguradoras y administradores internos. Cuando algo sale mal, el sistema técnico puede ser sofisticado, sin embargo, el sistema de gobernanza permanece improvisado.
La idea arquitectónica central de Fabric parece ser que la coordinación de máquinas no puede escalar de manera segura sin mecanismos compartidos de verificación. No verificación en el sentido de marketing estrecho, sino en el sentido práctico de poder establecer quién autorizó qué, qué modelo o política gobernó una acción, qué fuente de datos informó una decisión, qué entidad es responsable del mantenimiento o intervención, y cómo se propagan las actualizaciones o permisos a través de la red. Allí es donde el proyecto comienza a separarse de experimentos más superficiales. No solo propone una red abierta para robots; sugiere que la colaboración robótica necesita un marco público e inspeccionable para la responsabilidad si alguna vez desea madurar más allá de implementaciones aisladas.
Aquí es donde la gobernanza también entra en la imagen de una manera más significativa. A menudo, la gobernanza en proyectos técnicos emergentes se trata como un apéndice ceremonial: los titulares de tokens votan, las propuestas circulan, se reclama legitimidad. Pero la gobernanza en torno a sistemas encarnados no puede ser simbólica. Una máquina que actúa en el mundo físico crea exposición—al daño, a daños a la propiedad, a violaciones de privacidad, a incumplimientos regulatorios. Cualquier infraestructura seria para robots de propósito general debe tratar la gobernanza no como teatro comunitario, sino como un sistema para la toma de decisiones restringida bajo una responsabilidad real. ¿Quién puede desplegar una actualización de comportamiento? ¿Quién puede revocar una credencial? ¿Bajo qué condiciones puede una máquina operar de forma autónoma en un entorno sensible? ¿Cómo se resuelven las disputas cuando múltiples partes interesadas comparten un flujo de trabajo robótico? Estas no son preguntas abstractas. Son las condiciones operativas de confianza.
La noción de infraestructura nativa de agentes es importante aquí porque implica que las máquinas, los agentes de software y los operadores humanos deben ser tratados como participantes en un entorno de coordinación común, en lugar de como puntos finales aislados. Eso requiere un marco de identidad más sólido de lo que la industria a menudo admite. La identidad en este contexto no es marca o perfiles de usuario. Es la representación persistente y verificable de entidades dentro de una red: máquinas, desarrolladores, operadores, validadores, proveedores de servicios y quizás incluso autoridades regulatorias. Sin una identidad duradera, no hay responsabilidad seria. Sin responsabilidad, no hay un camino creíble hacia la autonomía compartida.
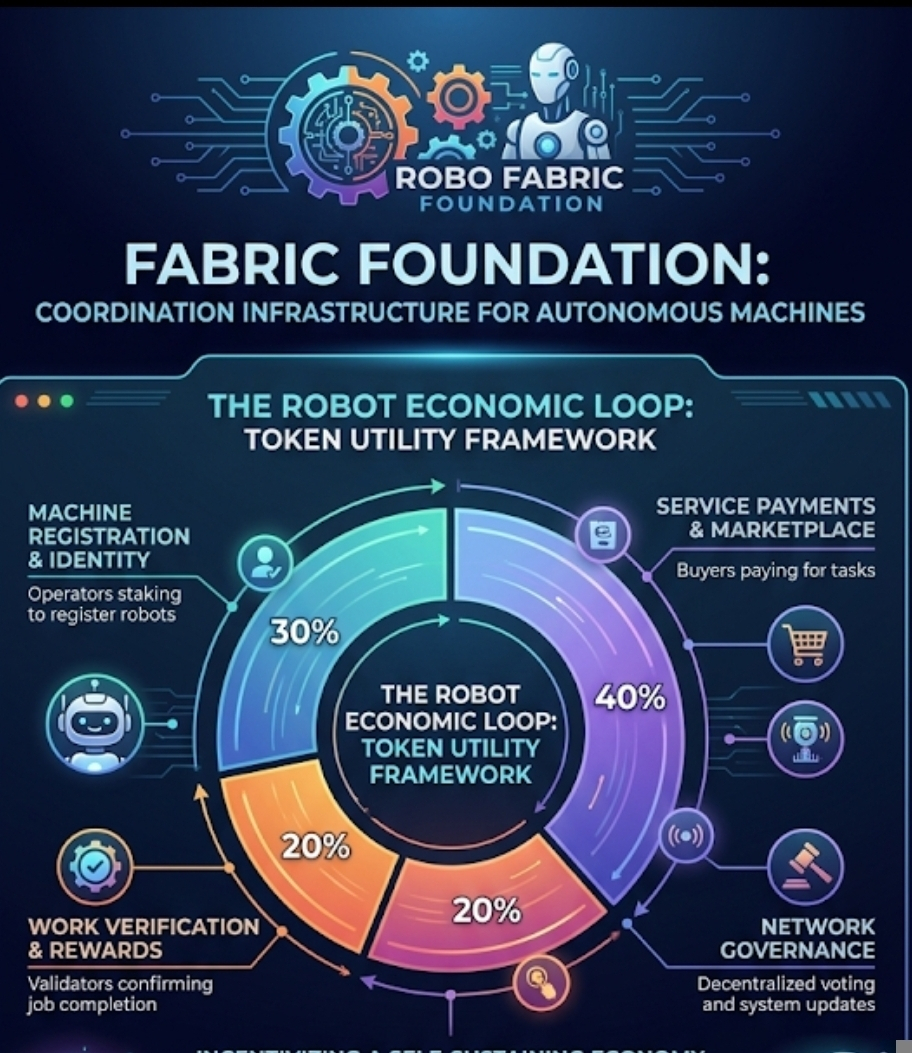
Si un token existe dentro de tal sistema, su función debe entenderse cuidadosamente. No encuentro persuasivos los tokens cuando simplemente recrean rieles de pago o inyectan especulación en áreas ya cargadas de complejidad operativa. Pero un token puede tener sentido cuando funciona como lógica de coordinación—cuando alinea incentivos entre los participantes que deben validar acciones, mantener infraestructura, asignar computación, gobernar actualizaciones y absorber la responsabilidad por la salud de la red. En ese modelo, el token no es el punto del sistema. Es un mecanismo para distribuir derechos de decisión y responsabilidad económica a través de una red que no puede depender de un único operador de confianza. Si Fabric tiene éxito dependerá en parte de si puede preservar esa disciplina. El momento en que la capa económica comienza a dominar la capa de coordinación, la arquitectura pierde seriedad.
Hay, por supuesto, restricciones reales aquí, y son sustanciales. La regulación no esperará pacientemente a que la infraestructura elegante madure. Los robots que operan en logística, atención médica, espacios públicos o entornos industriales están sujetos a regímenes legales fragmentados y en evolución. La certificación de seguridad, la gobernanza de datos, las implicaciones laborales y el cumplimiento transfronterizo moldearán la adopción al menos tanto como el mérito técnico. La interoperabilidad es otra idea atractiva que se vuelve difícil en la práctica. Los proveedores protegen sus pilas. Las empresas resisten la dependencia de capas de gobernanza externas. Los sistemas físicos envejecen, se desvían, fallan y requieren mantenimiento de maneras en que los sistemas de software no lo hacen. Y cada capa adicional de verificación o consenso introduce latencia, costo y carga de implementación.
También hay un riesgo filosófico que no debe ser ignorado. Los sistemas de responsabilidad pública pueden aclarar la responsabilidad, pero también pueden crear una falsa sensación de control si los modelos y comportamientos subyacentes siguen siendo poco comprendidos. Los registros verificables no garantizan buen juicio. La gobernanza transparente no elimina las asimetrías de poder. Una infraestructura modular aún puede producir comportamientos peligrosos si los incentivos premian la escala antes que la seguridad. Cualquier proyecto que conecte agentes autónomos o semi-autónomos en una red más amplia debe resistir la tentación de confundir la coordinación con la sabiduría.
Aún así, me fui pensando que Fabric Protocol está abordando una capa más profunda del problema que muchos proyectos en dominios adyacentes. No es especialmente difícil imaginar que los robots se vuelvan más capaces. Lo que es difícil es imaginar un mundo en el que máquinas heterogéneas, instituciones y partes interesadas humanas puedan coordinar esas capacidades bajo condiciones de confianza, auditabilidad y autoridad disputada. Ese es un problema de infraestructura antes de ser un problema de producto. Es un problema de gobernanza antes de ser una historia de crecimiento.
Por esa razón, ya no veo a Fabric como solo otro apilamiento ambicioso envuelto en un lenguaje futurista. Lo veo como un intento—todavía incierto, aún expuesto a todos los riesgos técnicos e institucionales habituales—de construir la capa administrativa y de verificación que falta para un mundo poblado por máquinas. Eso puede sonar menos emocionante que la disrupción, pero es mucho más importante. La mayoría de los sistemas fundamentales no parecen transformadores al principio. Lucen procedimentales, pesados, incluso excesivamente cautelosos. Solo más tarde nos damos cuenta de que el progreso duradero dependía menos de la capacidad espectacular que de la construcción silenciosa de reglas compartidas, identidades verificables y coordinación responsable.
Si Fabric Protocol importa a largo plazo, no será porque prometió un futuro robótico dramático. Será porque reconoció que una vez que las máquinas comienzan a participar en nuestros entornos comunes, la verdadera tarea es construir infraestructura que haga gobernable su presencia. Ese es un trabajo más lento. Es un trabajo menos glamoroso. Pero es el tipo de trabajo del que dependerán los sistemas futuros.
