Jaringan robot dapat memproses tugas dengan cepat dan tetap gagal secara strategis jika pembaruan kebijakan tertinggal dari insiden dunia nyata.
Sebagian besar sistem menganggap tata kelola sebagai dokumentasi statis sementara operasi berubah setiap minggu. Celah itu menciptakan risiko diam. Mode kegagalan baru muncul, operator berimprovisasi, dan aturan menyimpang dari kenyataan hingga sengketa besar memaksa intervensi darurat. Kecepatan bukanlah hambatan dalam skenario itu. Responsivitas tata kelola adalah.
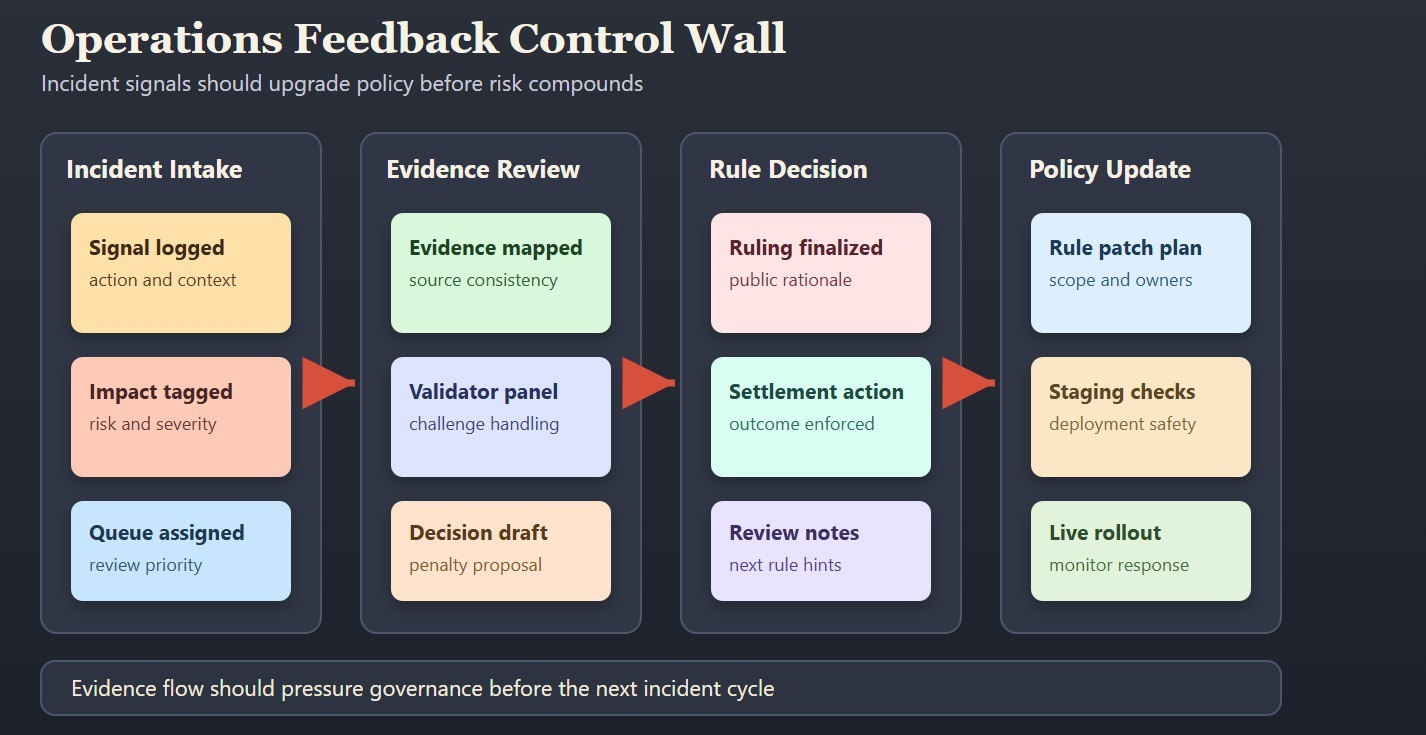
Penataan Fabric berguna karena mengaitkan umpan balik eksekusi dengan model koordinasi publik alih-alih loop komite tertutup. Mekanika tantangan, ekonomi validator, dan jalur aturan yang terlihat menciptakan struktur di mana bukti dari operasi dapat memberikan tekanan pada perubahan kebijakan sebelum kerusakan bertambah. Itu adalah tesis keandalan yang lebih kuat daripada "kami memiliki model yang baik dan niat yang baik."
Ini juga mengubah cara saya membaca `$ROBO`. Nilai utilitas dan pemerintahan harus berasal dari penggunaan permukaan kontrol yang nyata: partisipasi dalam pengawasan, penyelarasan insentif, dan kontinuitas evolusi aturan di bawah beban. Jika mekanisme tersebut aktif, jaringan dapat meningkat melalui tekanan. Jika tidak aktif, pemerintahan menjadi branding.
Bagi tim yang menerapkan layanan robotika jangka panjang, pertanyaan praktisnya bukan apakah insiden terjadi. Mereka pasti akan terjadi. Pertanyaan kuncinya adalah apakah setiap insiden membuat sistem lebih dapat dikelola atau lebih rapuh.
Ketika hasil robot yang diperebutkan berikutnya mencapai produksi, apakah lapisan kebijakan Anda akan beradaptasi melalui bukti publik, atau apakah itu akan bergantung pada pengecualian pribadi dan perbaikan kepercayaan yang tertunda?
@Fabric Foundation $ROBO #ROBO