

@Fabric Foundation Jika Anda pernah melihat robot gudang bekerja larut malam, itu hampir terasa rutin. Mesin itu meluncur di sepanjang lorong, mengangkat sebuah kontainer, menjatuhkannya di tempat lain, dan sistem dengan tenang mencatat bahwa pekerjaan telah selesai. Sebuah baris muncul di database. Inventaris disesuaikan. Tidak ada yang banyak berpikir tentang itu.
Di dalam sebuah perusahaan tunggal, catatan itu biasanya cukup.
Organisasi yang sama memiliki robot, perangkat lunak yang menjalankannya, dan database yang mencatat apa yang terjadi. Jika kesalahan muncul kemudian, insinyur menarik riwayat sistem. Mereka menggulir melalui cap waktu, penanda sederhana yang menunjukkan kapan setiap tindakan terjadi dan mencoba merekonstruksi urutannya. Asumsi ini cukup sederhana: catatan tersebut dapat dipercaya karena perusahaan mengontrol sistem yang membuatnya.
Segalanya mulai goyah sedikit setelah robot meninggalkan lingkungan tertutup tersebut.
Bayangkan sebuah mesin pengiriman mengambil pengiriman di satu gudang, memindahkannya ke rantai logistik yang dijalankan oleh perusahaan yang berbeda, dan akhirnya berinteraksi dengan infrastruktur kota di sepanjang rute. Robot ini memproduksi informasi sepanjang waktu. Jejak lokasi. Konfirmasi tugas. Data sensor yang menggambarkan rintangan atau perubahan rute.
Tetapi sebagian besar catatan tersebut berada di basis data pribadi yang dimiliki oleh siapa pun yang mengoperasikan mesin pada saat itu. Setiap peserta menyimpan versi peristiwa mereka sendiri.
Pada awalnya itu terdengar dapat dikelola. Perusahaan saling bertukar laporan sepanjang waktu. Namun, gesekan muncul saat tanggung jawab melewati batas. Satu sistem mengklaim robot telah menyelesaikan langkah. Sistem lain bergantung pada klaim itu sebelum melepaskan pembayaran atau memicu tindakan berikutnya.
Tiba-tiba pertanyaannya menjadi sedikit canggung.
Bagaimana seseorang dapat memverifikasi apa yang sebenarnya dilakukan mesin?
Ini kira-kira di sini pemikiran di balik Fabric Protocol memasuki percakapan. Bukan sebagai pembangun robot, tetapi lebih seperti infrastruktur di sekitar robot setelah mereka mulai beroperasi di lingkungan bersama.
Fabric mengusulkan menggunakan buku besar publik untuk mengoordinasikan tindakan robotik. Buku besar, dalam istilah sederhana, adalah catatan bersama tentang peristiwa. Dalam sistem berbasis blockchain, catatan itu didistribusikan di berbagai komputer dan terhubung melalui cap waktu dan bukti kriptografis, yang membuat entri masa lalu sulit diubah tanpa semua orang menyadarinya.
Untuk robotika, implikasinya cukup praktis. Ketika sebuah mesin menyelesaikan tugas, peristiwa tersebut dapat dicatat dalam catatan yang dapat diperiksa oleh banyak pihak. Alih-alih mempercayai basis data seorang operator tunggal, peserta dapat merujuk pada sejarah bersama tentang apa yang terjadi.
Fabric sering menggambarkan ini melalui gagasan komputasi yang dapat diverifikasi. Frasa ini terdengar teknis, meskipun maknanya cukup mendasar. Ini mengacu pada sistem yang dapat menunjukkan bahwa sebuah komputasi atau tindakan benar-benar terjadi tidak hanya melaporkan bahwa itu terjadi.
Itu penting ketika mesin berinteraksi dengan orang atau institusi yang tidak berbagi sistem internal yang sama.
Skala masalahnya tidak lagi terlalu kecil. Federasi Internasional Robotika memperkirakan bahwa sekitar 3.9 juta robot industri saat ini aktif di seluruh dunia, sebagian besar di bidang manufaktur tetapi semakin banyak di lingkungan logistik dan layanan. Ketika mesin-mesin ini mulai melintasi batas organisasi, lapisan koordinasi di sekitarnya menjadi semakin sulit untuk diabaikan.
Arsitektur Fabric berusaha menangani lapisan itu secara langsung. Data dari mesin masuk ke jaringan. Komputasi membantu memvalidasi apa yang terjadi. Mekanisme tata kelola memungkinkan berbagai pemangku kepentingan pengembang, operator, kadang-kadang regulator untuk berinteraksi dengan catatan aktivitas mesin yang sama.
Buku besar, dalam arti itu, mulai menyerupai memori bersama daripada infrastruktur keuangan.
Bayangkan sebuah robot inspeksi memindai bagian-bagian infrastruktur publik. Laporan-laporannya mungkin memengaruhi jadwal pemeliharaan atau keputusan keselamatan. Jika laporan-laporan tersebut terikat pada komputasi yang dapat diverifikasi yang dicatat di buku besar, percakapan sedikit berubah. Alih-alih sepenuhnya bergantung pada siapa pun yang mengerahkan robot, orang lain dapat meninjau bagaimana hasil tersebut dihasilkan dan kapan.
Semua ini tidak menghilangkan kompleksitas. Verifikasi terdistribusi memperlambat proses dibandingkan dengan sistem pribadi. Koordinasi antara banyak aktor memperkenalkan mode kegagalan sendiri. Bahkan transparansi menciptakan ketegangan desain tentang informasi apa yang harus tetap terlihat dan apa yang tidak.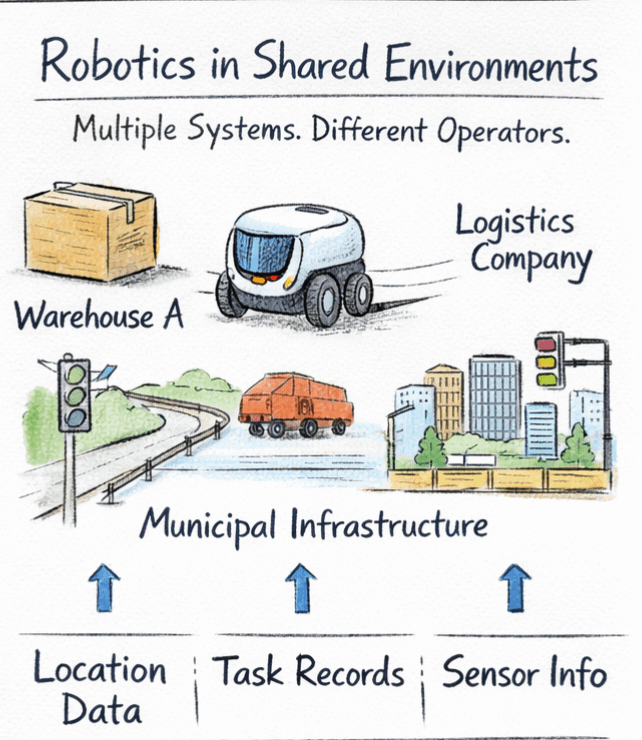
Namun, pergeseran mendasar terasa nyata.
Robot secara bertahap bergerak ke lingkungan di mana banyak organisasi dan banyak orang bergantung pada mesin yang sama. Ketika itu terjadi, kecerdasan saja tidak lagi memikul seluruh beban. Infrastruktur di sekitar untuk merekam, memeriksa, dan memahami tindakan mesin mulai menjadi sama pentingnya.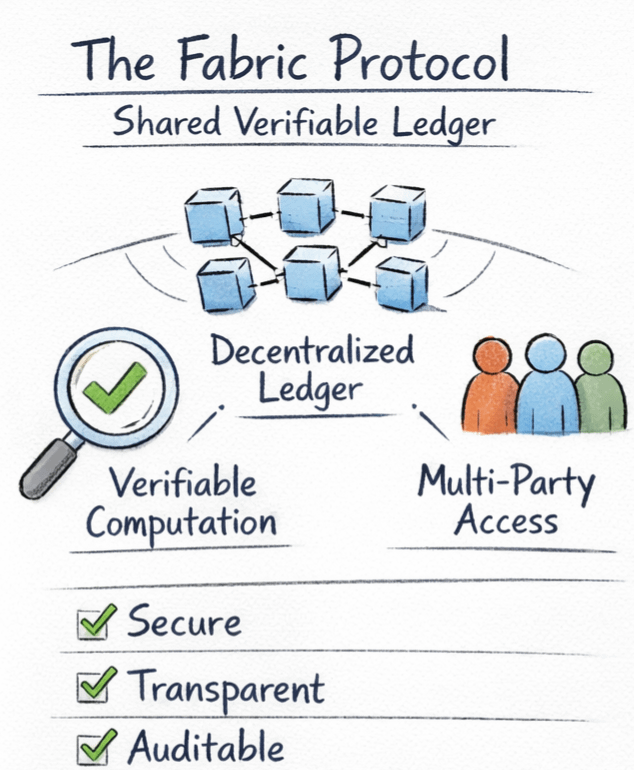 #ROBO $ROBO
#ROBO $ROBO
