
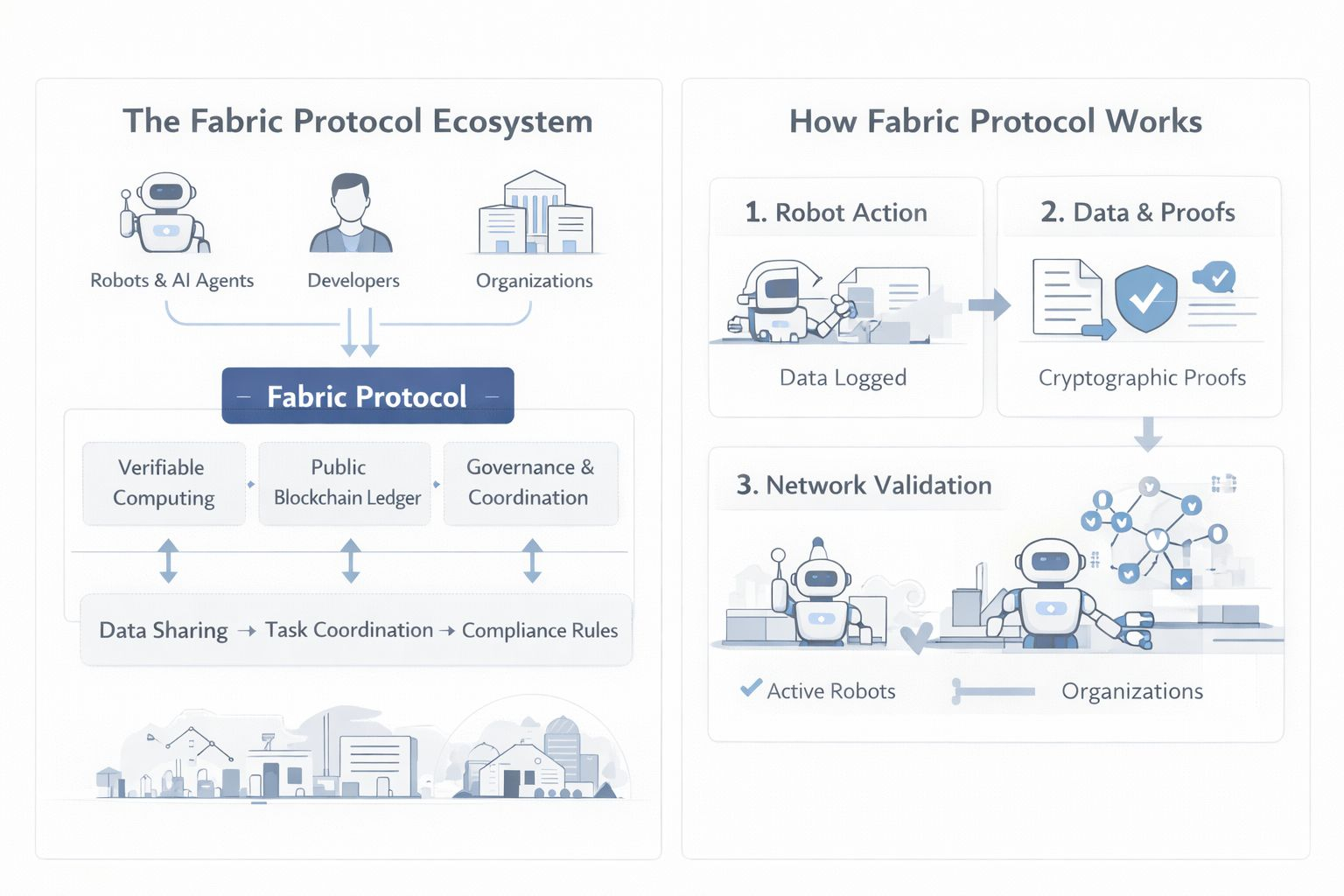
The first time I read about Fabric Protocol I didn’t immediately see it as a product or even as a typical crypto project. It felt more like a big bet on how machines might eventually organize themselves The idea is simple on the surface create an open network where robots, developers and organizations can coordinate through a shared system where actions and computations can be verified rather than blindly trusted In theory that sounds like a natural step forward. Robotics is growing quickly machines are becoming more autonomous and the systems around them are still mostly closed and controlled by individual companies.
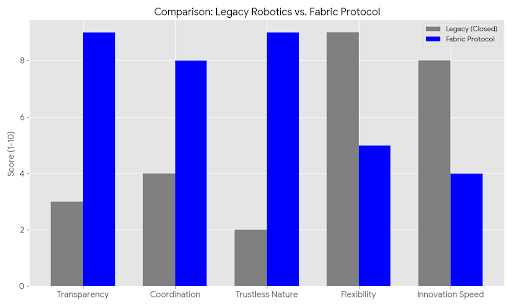
Right now, most robots operate inside private environments. The data they collect, the decisions they make and the logic guiding those decisions usually stay inside the company that built or deployed them From the outside everything looks like a black box. The machine might work perfectly well, but nobody really sees how it operates internally. Fabric Protocol is trying to push against that model by introducing a shared infrastructure where robotic activity can be coordinated and verified through a public system.
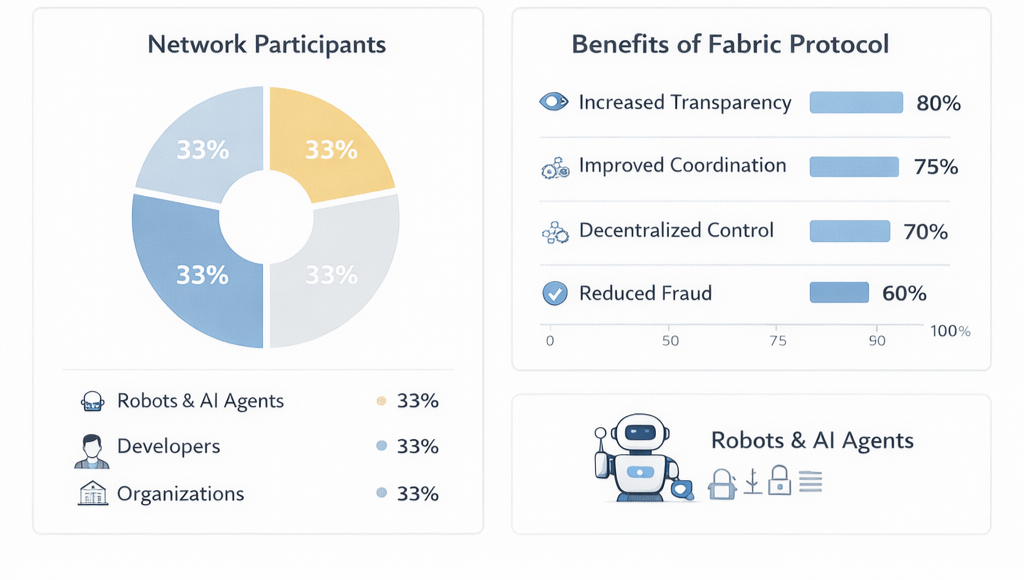
At first glance the appeal is obvious. If machines operate within a transparent framework collaboration becomes easier. Developers can build systems that interact with each other without relying entirely on trust between companies Organizations can observe how robotic systems behave rather than simply accepting claims about them. It feels like an attempt to bring structure to a space that is currently scattered across many isolated systems.
But the more you think about it the more an interesting question starts to form Does a system like this actually remove uncertainty from robotics or does it simply organize that uncertainty into something that looks easier to manage?
Robots don’t live inside neat digital environments They exist in the real world, and the real world is messy Sensors can misread situations. Data can be incomplete. Machines sometimes face situations that were never anticipated when they were designed Any protocol that claims to verify robotic activity has to translate those unpredictable situations into structured data that the network can understand.
And that translation process is not perfect.
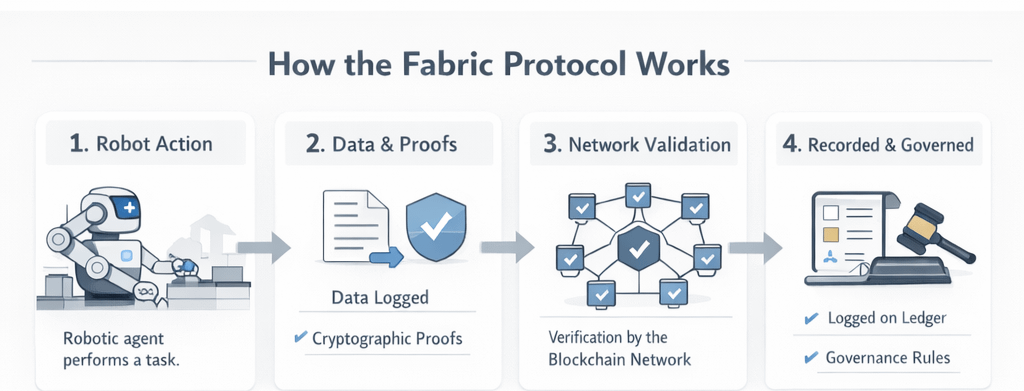
When Fabric talks about verifiable computation, what the system is really verifying is the digital record of an action. It checks whether certain computations happened and whether the rules of the protocol were followed. But those checks are still based on how reality was captured by sensors and software in the first place. If the input data is imperfect which often happens in robotics the verification process might confirm something that only partially reflects what actually happened in the real environment.
That doesn’t mean the system fails. It just means the protocol isn’t eliminating uncertainty Instead it’s creating a structured way of recording and interpreting it.
Over time, this creates subtle incentives within the ecosystem. Developers building robotic systems may start thinking not only about how their machines behave in the physical world, but also about how those actions appear inside the protocol. If certain behaviors are easier to verify or measure, those behaviors may become more common simply because they fit the system better.
We’ve seen similar patterns in other complex systems. Whenever a framework introduces metrics or verification standards, participants naturally learn how to work within those rules. Sometimes that strengthens the system. Other times it exposes gaps between what the system measures and what is actually happening.
Governance also becomes an important part of the story. A network that coordinates robotic agents isn’t just technical infrastructure. Over time it becomes a kind of environment that influences how machines behave. Decisions about updates, verification methods, and incentive structures will shape the direction of the entire ecosystem.
That creates an interesting tension. Robotics is a field that evolves quickly through experimentation. Developers test new ideas, iterate rapidly, and adjust systems as they learn from real-world behavior. Protocol infrastructure, however, usually changes more slowly because stability is important for participants who rely on it. If a large number of machines eventually operate within the same network, even small changes to the rules could have wide effects.
The real pressure on a system like this doesn’t appear in ideal situations. It appears in edge cases. A robot might encounter a scenario that doesn’t fit neatly within the verification framework. A developer might design an agent that technically follows the rules but behaves in unexpected ways. Incentives might encourage strategies that weren’t originally part of the design.
Those situations are where the true character of the system starts to reveal itself.
None of this makes Fabric Protocol a bad idea. In fact, the ambition behind it is part of what makes it interesting. Coordinating machines at scale is a difficult problem, and the current approach of isolated systems is unlikely to hold forever. If an open infrastructure can make robotic activity easier to verify and coordinate across different organizations, it could unlock entirely new kinds of collaboration.
But ideas like this are rarely proven by how convincing they sound in theory. They are tested when real systems begin interacting inside them. Real developers bringing their own incentives. Real robots operating in unpredictable environments. Real governance debates about how the protocol should evolve.
When that happens, the story around the protocol becomes less important than how the system behaves under pressure.
If Fabric Protocol can handle that complexity allowing enough flexibility for innovation while still providing meaningful structure it could become an important coordination layer for future robotics systems. If it struggles to balance those pressures, the project may still remain valuable as an experiment, one that shows just how difficult it is to translate the unpredictable behavior of machines in the real world into something that can be organized through a shared digital network.
@Fabric Foundation #ROBO #robo $ROBO
