@Fabric Foundation Protocol can sound abstract the first time you encounter it. A global open network. A public ledger. A non-profit foundation. Robots evolving together through shared infrastructure. At first glance, it feels like several ambitious ideas placed side by side.
But if you spend a little time with the concept, a clearer picture begins to emerge.
At its heart, Fabric Protocol is trying to solve a problem that robotics increasingly faces: coordination.
Robots Are Not Isolated Machines
Traditionally, robots are treated like standalone products—machines built by a company, shipped with hardware and software, and deployed in a specific environment. But the reality is more complicated.
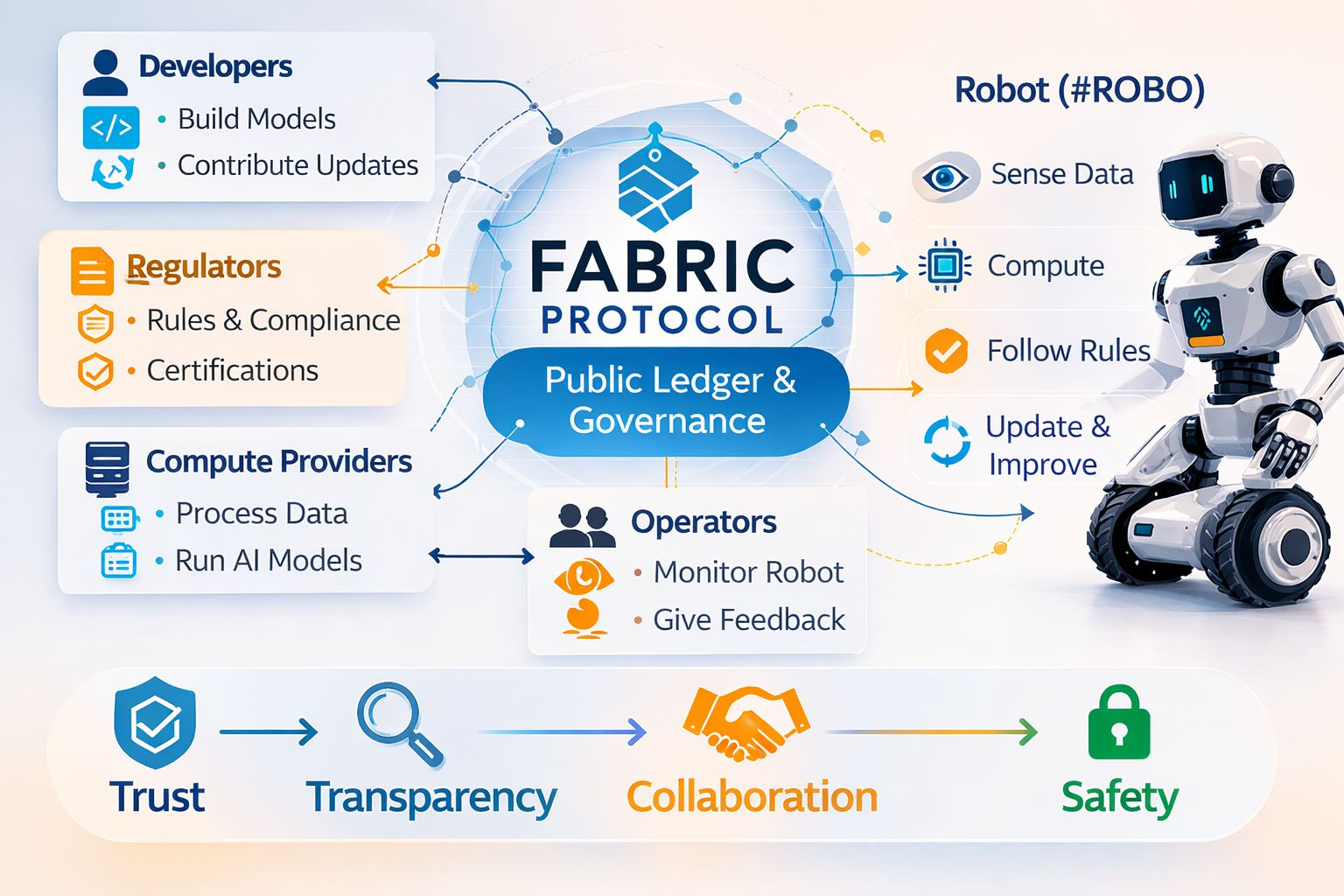
Robots gather data, rely on remote computation, receive updates, and interact with people and other machines. They operate inside a network of developers, operators, regulators, and users.
Once you look at robots this way, it becomes clear that the hardest challenge is not always the hardware.
It’s managing the relationships around the machine.
Who built the robot?
Which model version is it running?
What rules govern its actions?
Who approved the latest update?
And if something goes wrong—who is responsible?
Most modern systems handle these questions privately, inside company infrastructure. Fabric Protocol moves in a different direction. It proposes that key parts of this coordination should live in a public, verifiable network.
The Role of Verifiable Computation
One of the central ideas behind Fabric Protocol is verifiable computation.
Robots constantly process data and make decisions. However, in most systems those computations remain invisible. Users are simply expected to trust that the machine executed the correct model with the correct inputs.
Fabric introduces the possibility of proving that computation occurred as claimed.
A robot’s actions—whether perception, navigation, or task execution—can be anchored to verifiable records. Not every sensor reading needs to live on a public ledger, but important references can be stored or committed there.
This means that another party could later confirm:
What software or model was executed
Under what conditions it ran
What outputs or decisions were produced
In effect, robots gain something like an auditable memory.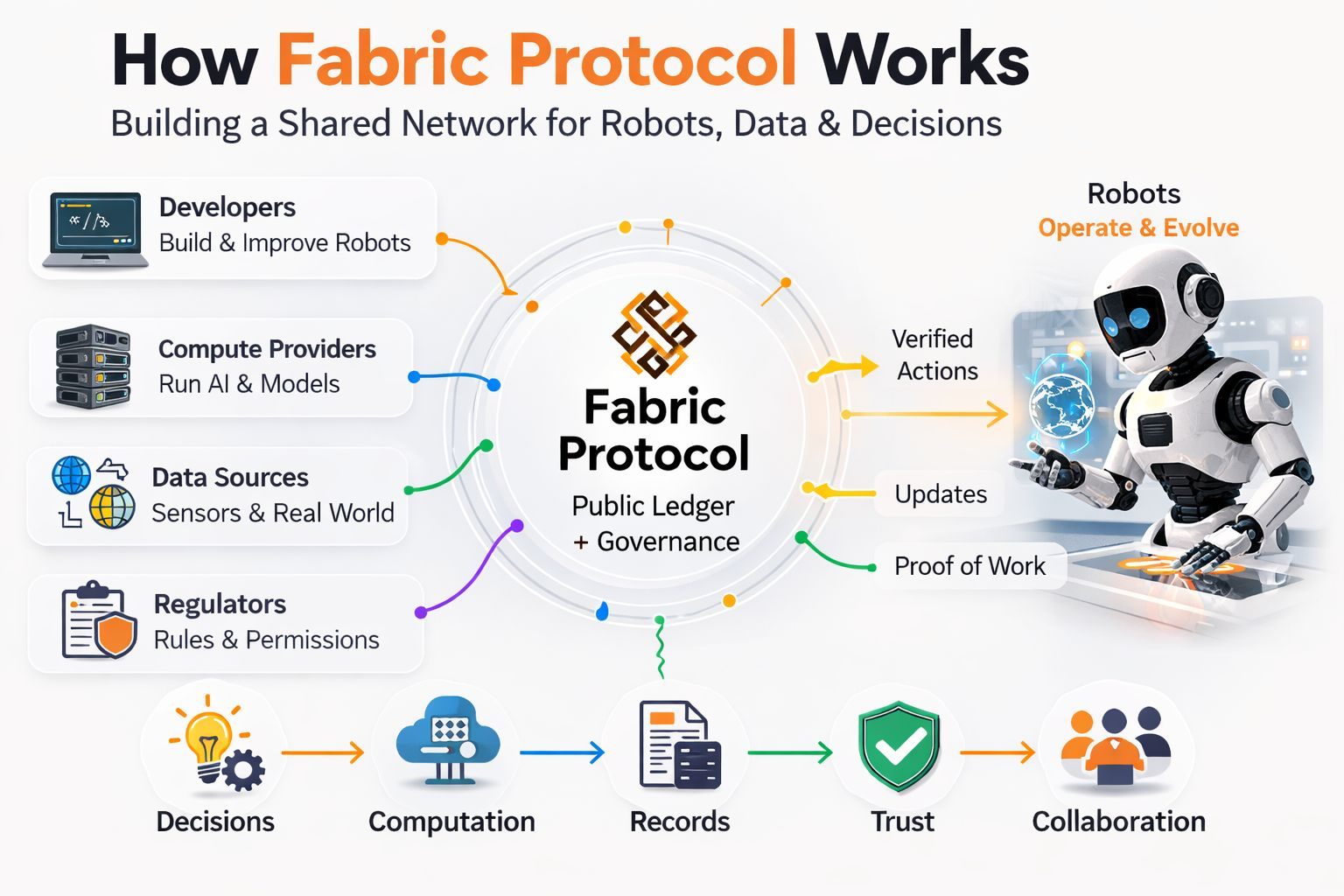
Agent-Native Infrastructure
Another important concept within Fabric Protocol is agent-native infrastructure.
Most digital systems today were designed for humans—logins, dashboards, approvals, and interfaces meant for people. Robots and autonomous software agents don’t interact with systems in the same way.
They need:
Identity
Permissions
Access to computation
Access to data
Ways to prove what they have done
Fabric aims to create infrastructure where robots and software agents are first-class participants rather than awkward additions to systems built for humans.
An agent should be able to request resources, execute tasks, and leave a verifiable record without pretending to be a human user.
Collaborative Evolution of Robots
Another interesting aspect of Fabric Protocol is its emphasis on collaborative evolution.
In traditional robotics development, improvements happen within closed organizations. A company upgrades its hardware or software internally and releases a new version.
But if robots become widely used across industries and environments, progress will likely come from many contributors.
For example:
Researchers might improve perception algorithms
Engineers could refine motion policies
Safety experts might add verification layers
Regulators could define new constraints
Operators might contribute real-world data
This creates a difficult question: how do many parties contribute to a robot’s evolution without losing accountability?
Fabric attempts to solve this by making updates and contributions visible within the protocol itself. Changes can be recorded, governed, and verified as part of a shared system.
Regulation as Part of the System
Many technology platforms treat regulation as something external—rules that appear later and slow things down.
Fabric Protocol takes a different perspective.
Robots operate in real-world environments like warehouses, hospitals, factories, and public spaces. In those environments, rules are unavoidable. Safety requirements, certifications, and permissions determine whether machines should operate at all.
Fabric explores the idea that regulatory constraints could become operational elements of the network rather than external paperwork.
For example:
Certain actions might require verified certifications
Sensitive tasks could demand specific compute paths
Human override mechanisms could be provable
This approach treats compliance not as a legal afterthought but as part of the robot’s operational framework.
Making Robot Behavior Legible
Ultimately, Fabric Protocol does not promise to eliminate complexity. Open networks can still be messy. Governance systems can still be influenced by powerful participants. Verifiable records can show what happened without guaranteeing it was the right decision.
But the protocol tries to make something important possible: legibility.
A robot operating in society is not just a technical object. It represents decisions made by many people across organizations and time. When those decisions remain hidden, accountability becomes difficult.
Fabric’s vision is to make that chain visible.
In this framework, the ledger, governance model, and verifiable computation are not isolated features. Together they create a structure where robot behavior can be tracked, inspected, and understood.
Not perfectly controlled.
But transparent enough for collaboration.
And perhaps that is the deeper idea behind Fabric Protocol: robots should not simply exist in the world—they should exist within systems that people can examine, influence, and trust.