Robotic systems work within centric control systems. Each individual robot has its own set parameters and control to report to a higher up. The general pattern is one system in control and the robots complete the work and report back. This is a reliable system and is usually found in clean environments, like factories, and in environments manipulated to have a single degree of freedom.
This pattern begins to fail when we move to the more fluid unpredictable environments.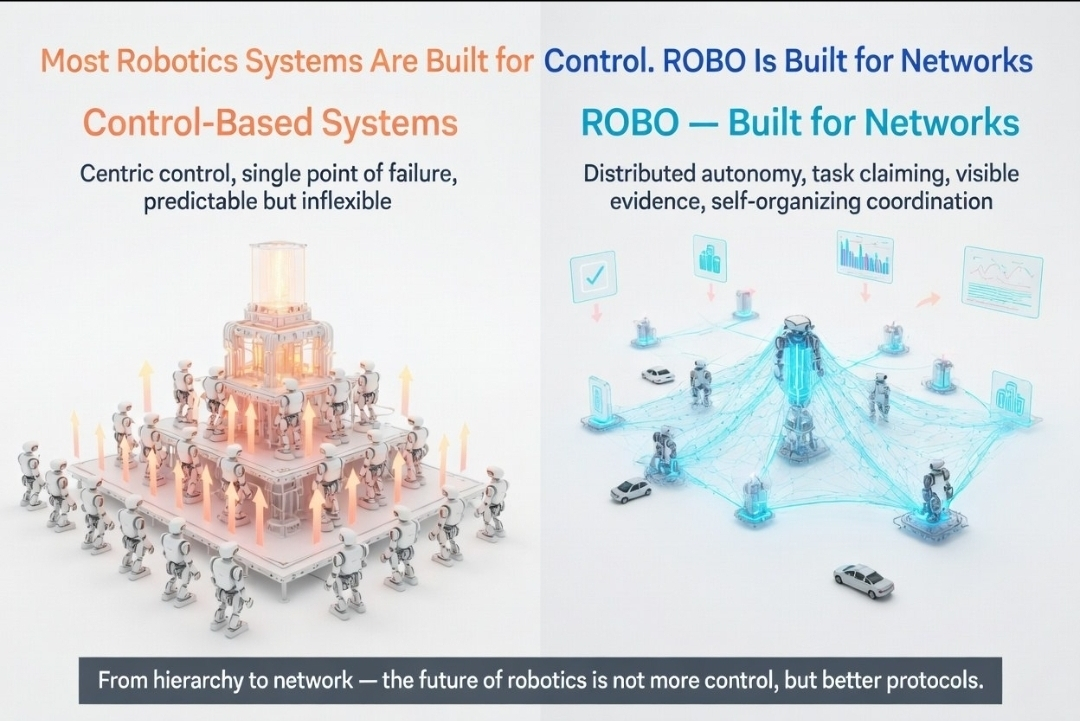
Control is the limiting factor.
Once we move to a situation where multiple participants can play different roles at different sites, the controlled center loses its coordinating ability. No one can control all the pieces. The system has to revert to manual control in the increased complexity emerging from multiple failing controlled centers.
At this point, the machine is able to do more, but the control systems that surround it limit it.
This is the point where ROBO takes a new path. Rather than designing control systems, it is interested in what happens when we consider robotic systems to function as a network. A distributed system, not a hierarchy, where machines, humans, and actions can be defined as a set of common control mechanisms instead of a centralized control system.
In this model, coordination occurs from multiple sources, rather than a single controller, and therefore, coordination occurs from the protocol itself.
You do not await your turn to complete a task. You claim a task as your own. Work is completed in your own time. Each person is trusted to work independently to reach individualized rewards.
Every piece of the puzzle is independent. They act under a system that helps maintain coherence in contribution.
This repose the task of the robot completely.
Under a control system, a robot is simply a tool. It takes instruction and does what it is told. In a more progressive system, the robot takes on a more vital role. It engages with the work, and submits results that are visible to the rest of the participants. Other participants can use the results provided to help complete the task. Work an be collaborative.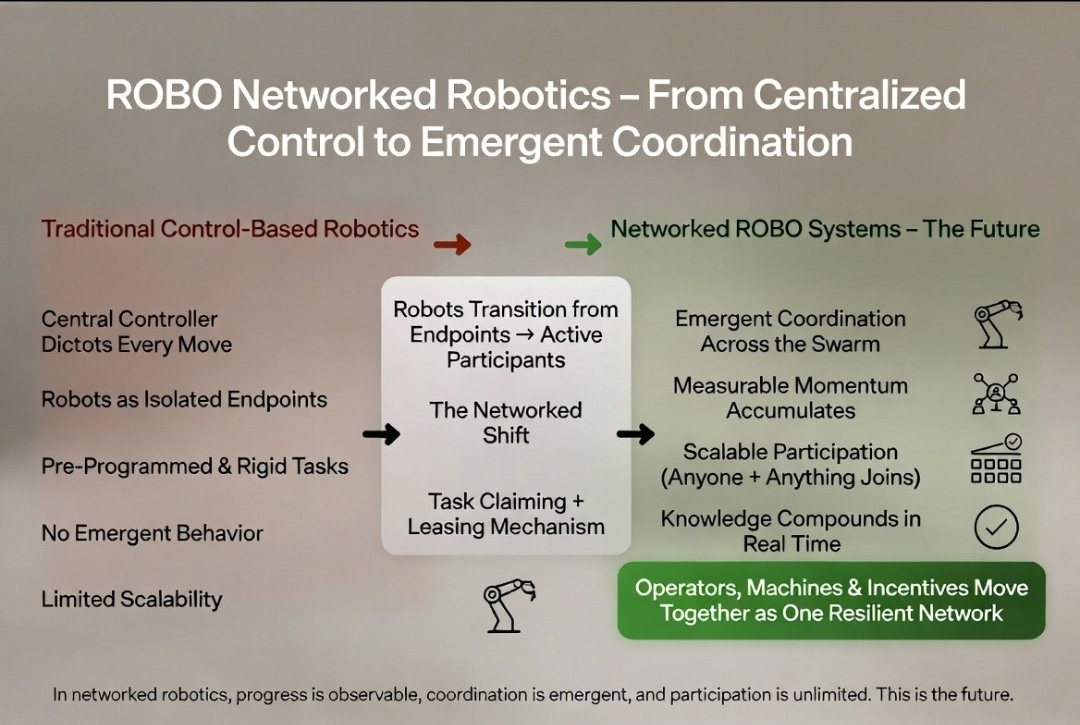
When the system relies on a network of participants, it becomes crucial that work and results be visible.
Coordination relies on trust. Work that is stalled must be stopped and cleared. Work does not progress and is assumed to be complete. It is always in a visible state for the next participant to use.
This is why evidence is so important.
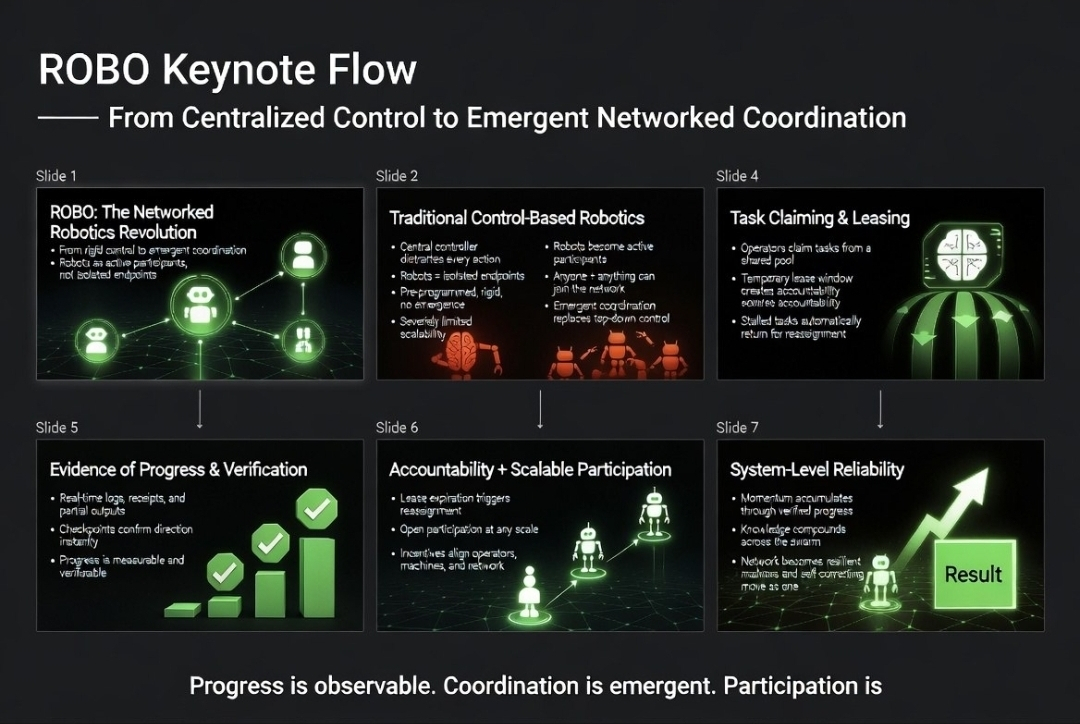
A task is only completed once a state change is logged. In a ROBO network, trust is transferred to records. These records, which include logs, outputs, and checkpoints, replace an observer, allowing the system to coordinate without direct supervision.
Once the foundation is laid, scaling can happen.
Rather than adding more controllers, networks bring more users onboard, who can enter, claim, do, and leave tasks autonomously. The interactions remain functional because the rules are within the system. Autonomous interactions are still functional thanks to underlying rules within system protocols. However, this kind of functional autonomy can also create a new set of constraints. Without external control, the system has to be designed to avoid stagnation and system exploitation. Tasks can't be allowed to loop endlessly. Progress has to be quantifiably aligned to ownership. Incentives need to be structured to reward completion and not just participation. Otherwise, the system can just become another network of unproductive actions. Motion without results is an unproductive state.
ROBO seems to be aware of this unproductive state.
ROBO design acknowledges underlying tensions. A person’s job is to keep an ensured task moving through the system. If no progress is being made, the ‘holder’/viewer will experience a reset. ROBO has designed a system where ownership of a task is expected to move progress, otherwise it will cycle admins endlessly.
The discipline of the system is what can be said to replace control.
Operational autonomy has to be built within the system so that no tasks can be stagnant, otherwise, the network will be unproductive. Users are placed in a system in such a way that the only way to gain is to do the work correctly.
That's a different type of system. It is not optimized for individual level predictability, rather, it is optimized for network level reliability.
This is where the long term implications starts to become clearer.
If the future of robotics involves more use in open distributed environments, control-based structures are going to be completely inadequate. They are too inflexible, too reliant on a centralized control system, and too slow to adapt to changing environments.
Network-based structures offer a more promising approach. They enable a more self-integrative system where machines can function cooperatively to maintain and develop their own structure through distributed control, shared rules, and inter-agential verifiable actions.
This is the area ROBO is pursuing.
Not in the direction of supplanting the machines, but in the direction of altering the other systems in the operational environment.
Ultimately, the future of robotics will be defined not by how much control we exercise over machines, but by how much we can enable them to self-organize without us.