Penulis: 0xjacobzhao | https://linktr.ee/0xjacobzhao
Laporan penelitian independen ini didukung oleh IOSG Ventures, terima kasih kepada Hans (RoboCup Asia-Pasifik), Nichanan Kesonpat (1kx), Robert Koschig (1kx), Amanda Young (Collab+Currency), Jonathan Victor (Ansa Research), Lex Sokolin (Generative Ventures), Jay Yu (Pantera Capital), Jeffrey Hu (Hashkey Capital) atas saran berharga yang diberikan untuk artikel ini. Selama penulisan, juga berkonsultasi dengan tim proyek seperti OpenMind, BitRobot, peaq, Auki Labs, XMAQUINA, GAIB, Vader, Gradient, Tashi Network, dan CodecFlow. Artikel ini berusaha untuk menyajikan konten yang objektif dan akurat, beberapa pendapat melibatkan penilaian subjektif, dan tidak dapat dihindari adanya penyimpangan, mohon pengertian dari pembaca.
I. Panorama Robot: Dari otomatisasi industri ke kecerdasan humanoid
Rantai industri robot tradisional telah membentuk sistem lapisan lengkap dari bawah ke atas, mencakup empat tahap: komponen inti—sistem kontrol tengah—perakitan mesin—integrasi aplikasi. Komponen inti (pengendali, servo, pengurangan, sensor, baterai, dll.) memiliki penghalang teknologi tertinggi, menentukan kinerja dan batas biaya dari keseluruhan mesin; sistem kontrol adalah 'otak dan otak kecil' robot, bertanggung jawab untuk perencanaan keputusan dan kontrol gerakan; perakitan keseluruhan mencerminkan kemampuan integrasi rantai pasokan. Sistem integrasi dan aplikasi yang menentukan kedalaman komersialisasi kini menjadi inti nilai baru.
Berdasarkan skenario aplikasi dan bentuk, robot global sedang berkembang menuju jalur 'otomatisasi industri → kecerdasan skenario → kecerdasan umum', membentuk lima kategori utama: robot industri, robot bergerak, robot layanan, robot khusus, dan robot humanoid.
Robot industri (Industrial Robots): saat ini adalah satu-satunya jalur yang sepenuhnya matang, yang banyak diterapkan dalam pengelasan, perakitan, pengecatan, dan pengangkutan dalam proses manufaktur. Industri telah membentuk sistem rantai pasokan yang terstandarisasi, margin kotor yang stabil, ROI yang jelas. Subkategori kolaborasi robot (Cobots) menekankan kerja sama manusia-mesin, ringan dan mudah diterapkan, tumbuh paling cepat. Perusahaan-perusahaan perwakilan: ABB, Fanuc, Yaskawa, KUKA, Universal Robots, Geek+, dan lain-lain.
Robot bergerak (Mobile Robots): termasuk AGV (kendaraan panduan otomatis) dan AMR (robot bergerak mandiri), telah diterapkan secara luas di logistik, pengiriman e-commerce, dan transportasi manufaktur, menjadi kategori paling matang di sisi B. Perusahaan-perusahaan perwakilan: Amazon Robotics, Geek+, Quicktron, Locus Robotics.
Robot layanan (Service Robots): ditujukan untuk industri pembersihan, makanan, hotel, dan pendidikan, merupakan bidang dengan pertumbuhan tercepat di sisi konsumen. Produk pembersihan telah memasuki logika elektronik konsumen, dan pengiriman medis dan komersial mempercepat komersialisasi. Selain itu, sejumlah robot operasional yang lebih umum sedang muncul (seperti sistem dual-arm Dyna) — lebih fleksibel dibandingkan produk tugas tertentu, tetapi belum mencapai universalitas robot humanoid. Perusahaan-perusahaan perwakilan: Ecovacs, Roborock, PuduTech, Qianlang Intelligent, iRobot, Dyna, dll.
Robot khusus terutama melayani skenario medis, militer, konstruksi, kelautan, dan antariksa, dengan skala pasar yang terbatas tetapi margin yang tinggi dan penghalang yang kuat, banyak bergantung pada pesanan pemerintah dan perusahaan, berada di tahap pertumbuhan segmentasi vertikal, proyek tipikal termasuk Intuitive Surgical, Boston Dynamics, ANYbotics, NASA Valkyrie, dll.
Robot humanoid (Humanoid Robots): dianggap sebagai 'platform tenaga kerja umum' di masa depan. Perusahaan-perusahaan perwakilan meliputi Tesla (Optimus), Figure AI (Figure 01), Sanctuary AI (Phoenix), Agility Robotics (Digit), Apptronik (Apollo), 1X Robotics, Neura Robotics, Unitree, UBTECH, dan Zhiyuan Robotics.
Robot humanoid adalah arah frontier yang paling diperhatikan saat ini, nilai intinya terletak pada struktur humanoid yang disesuaikan dengan ruang sosial yang ada, dianggap sebagai bentuk kunci menuju 'platform tenaga kerja umum'. Berbeda dengan robot industri yang mengejar efisiensi ekstrem, robot humanoid menekankan adaptabilitas umum dan kemampuan migrasi tugas, dapat memasuki pabrik, rumah, dan ruang publik tanpa perlu mengubah lingkungan.
Saat ini, sebagian besar robot humanoid masih berada di tahap demonstrasi teknologi, terutama memverifikasi keseimbangan dinamis, kemampuan berjalan, dan operasi. Meskipun beberapa proyek telah mulai melakukan penyebaran skala kecil di skenario pabrik yang sangat terkontrol (seperti Figure × BMW, Agility Digit), dan diharapkan mulai 2026 lebih banyak produsen (seperti 1X) akan memasuki distribusi awal, ini masih merupakan aplikasi yang 'terbatas' dalam 'skenario sempit, tugas tunggal', bukan benar-benar tenaga kerja yang umum. Secara keseluruhan, masih diperlukan beberapa tahun untuk mencapai komersialisasi berskala. Kendala utama termasuk: masalah kontrol seperti koordinasi multi-derajat kebebasan dan keseimbangan dinamis waktu nyata; masalah energi dan daya tahan yang terhambat oleh kepadatan energi baterai dan efisiensi penggerak; rantai persepsi-ke-keputusan yang mudah tidak stabil dan sulit untuk digeneralisasi di lingkungan terbuka; celah data yang signifikan (sulit mendukung pelatihan strategi umum); migrasi lintas bentuk tubuh belum terpecahkan; serta rantai pasokan perangkat keras dan kurva biaya (terutama di luar China) masih merupakan penghalang nyata, membuat pengimplementasian berskala besar dan biaya rendah semakin sulit.
Jalur komersialisasi di masa depan diperkirakan akan mengalami tiga tahap: jangka pendek didominasi oleh Demo-as-a-Service, bergantung pada percontohan dan subsidi; jangka menengah berevolusi menjadi Robotics-as-a-Service (RaaS), membangun ekosistem tugas dan keterampilan; jangka panjang berfokus pada cloud tenaga kerja dan layanan berlangganan cerdas, mendorong pusat nilai bergeser dari pembuatan perangkat keras ke jaringan perangkat lunak dan layanan. Secara keseluruhan, robot humanoid berada pada periode transisi kunci dari demonstrasi ke pembelajaran mandiri, kemampuan untuk melampaui tiga ambang kontrol, biaya, dan algoritma di masa depan akan menentukan apakah mereka dapat benar-benar mewujudkan kecerdasan embodied.
II. AI × Robot: Fajar Era Kecerdasan Embodied
Otomatisasi tradisional terutama bergantung pada pemrograman sebelumnya dan kontrol linier (seperti arsitektur DSOP persepsi-perencanaan-kontrol), hanya dapat berjalan dengan andal di lingkungan yang terstruktur. Namun, dunia nyata jauh lebih kompleks dan berubah-ubah, generasi baru kecerdasan embodied (Embodied AI) mengambil jalur paradigma yang berbeda: melalui model besar dan pembelajaran representasi yang seragam, memungkinkan robot untuk memiliki kemampuan 'memahami-prediksi-tindakan' lintas skenario. Kecerdasan embodied menekankan penggabungan dinamis antara tubuh (perangkat keras) + otak (model) + lingkungan (interaksi), robot adalah wadah, sedangkan kecerdasan adalah inti.
AI generatif (Generative AI) adalah kecerdasan dunia bahasa, unggul dalam memahami simbol dan semantik; kecerdasan embodied (Embodied AI) adalah kecerdasan dunia nyata, menguasai persepsi dan tindakan. Keduanya masing-masing mewakili 'otak' dan 'tubuh', mewakili dua jalur evolusi AI yang sejajar. Dari segi tingkatan kecerdasan, kecerdasan embodied lebih tinggi dibandingkan dengan AI generatif, tetapi kematangannya masih jelas tertinggal. LLM bergantung pada korpus besar dari internet, membentuk siklus jelas 'data → komputasi → penyebaran'; sementara kecerdasan robot membutuhkan data yang terikat kuat dengan perspektif pertama, multimodal, dan tindakan — termasuk jejak kontrol jarak jauh, video perspektif pertama, peta ruang, urutan tindakan, dan data ini secara alami tidak ada, harus dihasilkan melalui interaksi nyata atau simulasi dengan fidelitas tinggi, sehingga menjadi lebih langka dan mahal. Meskipun simulasi dan data sintesis membantu, tetapi belum dapat menggantikan sensor nyata — pengalaman gerakan, inilah juga alasan mengapa Tesla, Figure, dan lainnya harus membangun pabrik data operasi jarak jauh mereka sendiri dan mengapa munculnya pabrik penandaan data pihak ketiga di Asia Tenggara. Singkatnya: LLM belajar dari data yang sudah ada, sementara robot harus 'menciptakan' data melalui interaksi dengan dunia fisik. Dalam 5–10 tahun ke depan, keduanya akan terintegrasi secara mendalam dalam model Vision–Language–Action dan arsitektur Agen Embodied — LLM bertanggung jawab atas kognisi tingkat tinggi dan perencanaan, robot bertanggung jawab atas eksekusi dunia nyata, membentuk siklus dua arah antara data dan tindakan, bersama-sama mendorong AI dari 'kecerdasan bahasa' menuju kecerdasan umum yang sebenarnya (AGI).
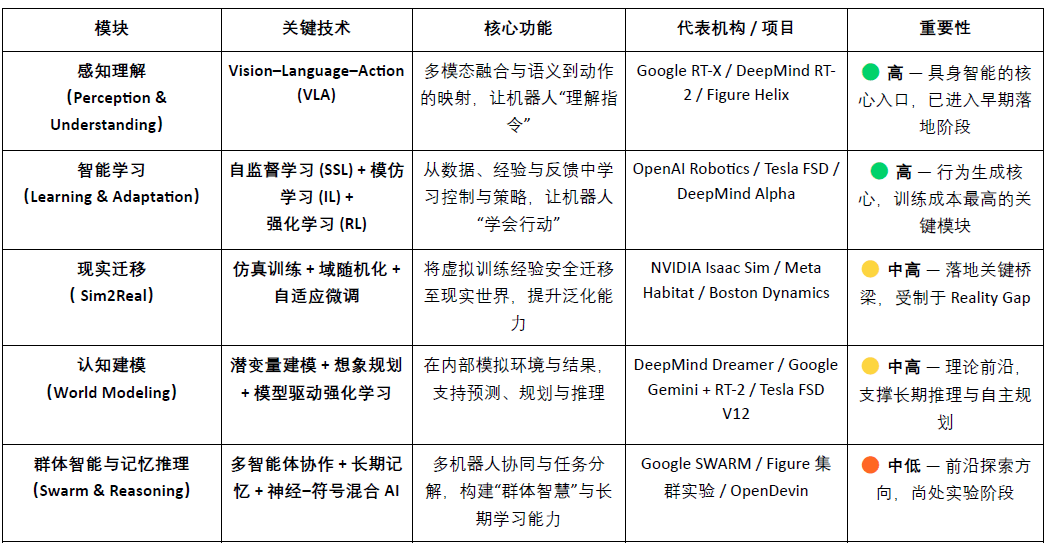
Sistem teknologi inti kecerdasan embodied dapat dianggap sebagai tumpukan cerdas dari bawah ke atas: VLA (penggabungan persepsi), RL/IL/SSL (pembelajaran cerdas), Sim2Real (migrasi dunia nyata), Model Dunia (pemodelan kognitif), serta kolaborasi dan penalaran multi-agen (Swarm & Reasoning). Di antara mereka, VLA dan RL/IL/SSL adalah 'mesin' dari kecerdasan embodied, menentukan implementasi dan komersialisasinya; Sim2Real dan Model Dunia adalah teknologi kunci yang menghubungkan pelatihan virtual dengan eksekusi nyata; kolaborasi multi-agen dan penalaran memori mewakili evolusi kelompok dan metakognisi pada tingkatan yang lebih tinggi.
Pemahaman persepsi: model visual–bahasa–tindakan (Vision–Language–Action)
Model VLA mengintegrasikan tiga saluran: visual (Vision) — bahasa (Language) — tindakan (Action), memungkinkan robot memahami niat dari bahasa manusia dan mengubahnya menjadi tindakan konkret. Proses pelaksanaannya mencakup analisis semantik, identifikasi tujuan (dari input visual untuk menentukan objek target), serta perencanaan jalur dan eksekusi tindakan, sehingga mewujudkan 'memahami semantik — merasakan dunia — menyelesaikan tugas', merupakan salah satu terobosan kunci dalam kecerdasan embodied. Proyek representatif saat ini meliputi Google RT-X, Meta Ego-Exo, dan Figure Helix, yang masing-masing menunjukkan pemahaman lintas modal, persepsi imersif, dan kontrol berbasis bahasa.
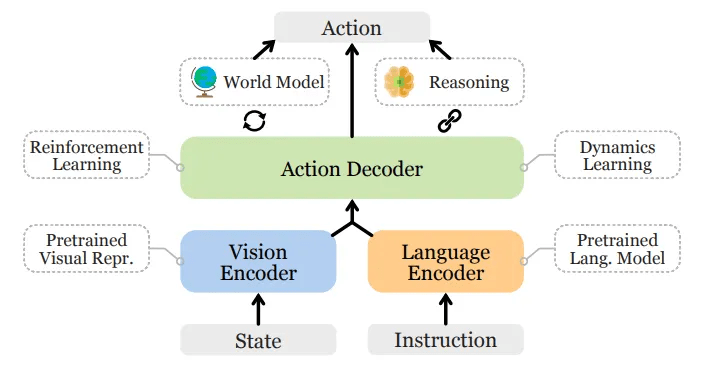
Arsitektur umum model Vision-Language-Action
Saat ini, VLA masih berada di tahap awal, menghadapi empat jenis kendala inti:
1) Ambiguitas semantik dan generalisasi tugas yang lemah: model sulit memahami instruksi yang kabur dan terbuka;
2) Ketidakstabilan penyelarasan visual dan gerakan: kesalahan persepsi diperbesar dalam perencanaan dan eksekusi jalur;
3) Data multimodal yang langka dan standar yang tidak seragam: biaya pengumpulan dan penandaan tinggi, sulit membentuk roda data skala besar;
4) Tantangan sumbu waktu dan ruang pada tugas jangka panjang: rentang tugas yang terlalu panjang menyebabkan perencanaan dan kemampuan ingatan yang tidak cukup, sementara ruang yang terlalu besar memaksa model untuk menginferensikan hal-hal 'di luar pandangan', saat ini VLA kekurangan model dunia yang stabil dan kemampuan inferensi lintas ruang.
Masalah-masalah ini secara kolektif membatasi kemampuan generalisasi lintas skenario VLA dan proses pelaksanaan berskala.
Pembelajaran cerdas: Pembelajaran mandiri (SSL), Pembelajaran tiruan (IL), dan Pembelajaran penguatan (RL)
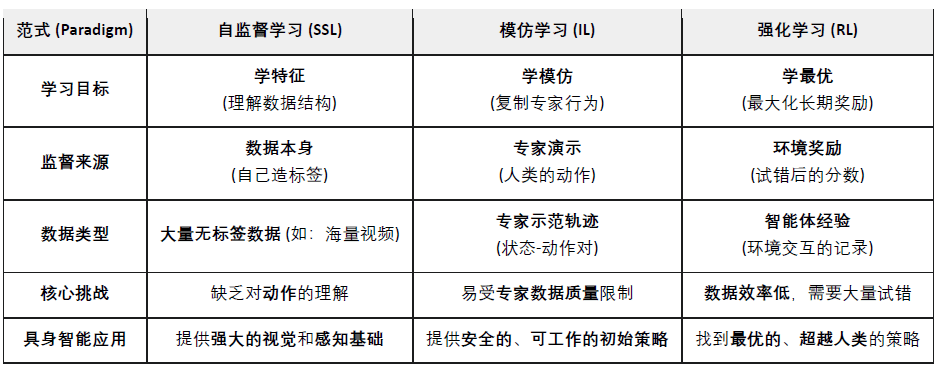
Pembelajaran mandiri (Self-Supervised Learning): secara otomatis mengekstrak fitur semantik dari data persepsi, memungkinkan robot untuk 'memahami dunia'. Seperti membuat mesin belajar mengamati dan merepresentasikan.
Pembelajaran tiruan (Imitation Learning): dengan meniru demonstrasi manusia atau contoh ahli, cepat menguasai keterampilan dasar. Seperti membuat mesin belajar bertindak seperti manusia.
Pembelajaran penguatan (Reinforcement Learning): melalui mekanisme 'hadiah-hukuman', robot mengoptimalkan strategi tindakan melalui percobaan dan kesalahan. Seperti membuat mesin belajar tumbuh melalui percobaan dan kesalahan.
Dalam kecerdasan embodied (Embodied AI), pembelajaran mandiri (SSL) bertujuan agar robot dapat memprediksi perubahan status dan hukum fisik melalui data persepsi, sehingga memahami struktur sebab akibat dunia; pembelajaran penguatan (RL) adalah mesin inti pembentukan kecerdasan, mendorong robot menguasai perilaku kompleks seperti berjalan, mengambil, menghindar melalui interaksi dengan lingkungan dan pengoptimalan berbasis sinyal hadiah; pembelajaran tiruan (IL) mempercepat proses ini melalui demonstrasi manusia, memungkinkan robot cepat mendapatkan prioritas tindakan. Arah utama saat ini adalah menggabungkan ketiga pendekatan tersebut, membangun kerangka pembelajaran hierarkis: SSL menyediakan dasar representasi, IL memberikan prioritas manusia, RL mendorong pengoptimalan strategi, untuk menyeimbangkan efisiensi dan stabilitas, bersama-sama membentuk mekanisme inti dari pemahaman hingga tindakan dalam kecerdasan embodied.
Migrasi nyata: Sim2Real — Lompatan dari simulasi ke realitas
Sim2Real (Simulasi ke Realitas) adalah proses untuk melatih robot dalam lingkungan virtual dan kemudian memindahkannya ke dunia nyata. Ini menghasilkan data interaksi berskala besar melalui lingkungan simulasi dengan fidelity tinggi (seperti NVIDIA Isaac Sim & Omniverse, DeepMind MuJoCo), secara signifikan mengurangi biaya pelatihan dan keausan perangkat keras. Intinya adalah memperkecil 'jurang antara simulasi dan realitas', dengan metode utama mencakup:
Randomisasi domain (Domain Randomization): secara acak mengatur parameter pencahayaan, gesekan, kebisingan, dll. dalam simulasi, meningkatkan kemampuan generalisasi model;
Kalibrasi konsistensi fisik: menggunakan data sensor nyata untuk mengkalibrasi mesin simulasi, meningkatkan realisme fisik;
Penyetelan halus adaptif (Adaptive Fine-tuning): melakukan pelatihan ulang cepat di lingkungan nyata, mewujudkan migrasi yang stabil.
Sim2Real adalah bagian pusat dari pelaksanaan kecerdasan embodied, memungkinkan model AI belajar 'persepsi—keputusan—kontrol' dalam dunia virtual yang aman dan berbiaya rendah. Sim2Real telah matang dalam pelatihan simulasi (seperti NVIDIA Isaac Sim, MuJoCo), tetapi migrasi nyata masih dibatasi oleh Reality Gap, biaya komputasi tinggi dan biaya penandaan, serta kurangnya generalisasi dan keamanan di lingkungan terbuka. Meskipun demikian, Simulation-as-a-Service (SimaaS) kini menjadi infrastruktur paling ringan namun paling bernilai strategis di era kecerdasan embodied, dengan model bisnis termasuk langganan platform (PaaS), penghasilan data (DaaS), dan verifikasi keamanan (VaaS).
Pemodelan kognitif: Model Dunia — 'dunia internal' robot.
Model Dunia (World Model) adalah 'otak internal' dari kecerdasan embodied, memungkinkan robot untuk mensimulasikan lingkungan internal dan konsekuensi tindakan, mewujudkan prediksi dan penalaran. Ini melalui pembelajaran pola dinamis lingkungan, membangun representasi internal yang dapat diprediksi, sehingga agen dapat 'berlatih' hasil sebelum eksekusi, berevolusi dari pelaksana pasif menjadi penalaran aktif, proyek-proyek representatif mencakup DeepMind Dreamer, Google Gemini + RT-2, Tesla FSD V12, NVIDIA WorldSim, dll. Jalur teknologi khas mencakup:
Pemodelan variabel laten (Latent Dynamics Modeling): mengompresi persepsi berdimensi tinggi ke dalam ruang status laten;
Pelatihan imajinasi berbasis prediksi waktu (Imagination-based Planning): simulasi percobaan dan prediksi jalur dalam model;
Pembelajaran penguatan berbasis model (Model-based RL): menggantikan lingkungan nyata dengan model dunia, mengurangi biaya pelatihan.
Model Dunia berada di garis depan teori kecerdasan embodied, merupakan jalur inti untuk membuat robot beralih dari 'reaktif' menjadi 'prediktif', tetapi masih terbatas oleh kompleksitas pemodelan, prediksi jangka panjang yang tidak stabil, dan kurangnya standar yang seragam.
Kecerdasan kolektif dan penalaran memori: dari tindakan individu menuju kognisi kolaboratif
Kolaborasi multi-agen (Multi-Agent Systems) dan penalaran memori (Memory & Reasoning) mewakili dua arah penting evolusi kecerdasan embodied dari 'kecerdasan individu' menjadi 'kecerdasan kolektif' dan 'kecerdasan kognitif'. Keduanya mendukung pembelajaran kolaboratif sistem cerdas dan kemampuan adaptasi jangka panjang.
Kolaborasi multi-agen (Swarm / Cooperative RL):
Mengacu pada banyak agen yang mencapai keputusan kolaboratif dan distribusi tugas melalui pembelajaran penguatan terdistribusi atau kolaboratif dalam lingkungan bersama. Arah ini telah memiliki dasar penelitian yang solid, seperti eksperimen OpenAI Hide-and-Seek yang menunjukkan kerja sama spontan dan munculnya strategi oleh banyak agen, algoritma DeepMind QMIX dan MADDPG menyediakan kerangka kolaborasi pelatihan terpusat dan eksekusi terdistribusi. Metode tersebut telah diterapkan dan diverifikasi dalam skenario seperti penjadwalan robot gudang, inspeksi, dan kontrol kelompok.
Memori dan penalaran (Memory & Reasoning):
Fokus pada memberikan agen kemampuan memori jangka panjang, pemahaman konteks, dan kemampuan penalaran sebab-akibat adalah arah kunci untuk mewujudkan migrasi lintas tugas dan perencanaan mandiri. Penelitian khas mencakup DeepMind Gato (agen multi-tugas yang menyatukan persepsi-bahasa-kontrol) dan seri DeepMind Dreamer (perencanaan imajinatif berbasis model dunia), serta agen kecerdasan embodied terbuka seperti Voyager, yang menggunakan memori eksternal dan evolusi mandiri untuk mewujudkan pembelajaran berkelanjutan. Sistem-sistem ini meletakkan dasar bagi robot untuk memiliki kemampuan 'mengingat masa lalu, meramalkan masa depan'.
Pola industri kecerdasan embodied global: kolaborasi dan persaingan berdampingan
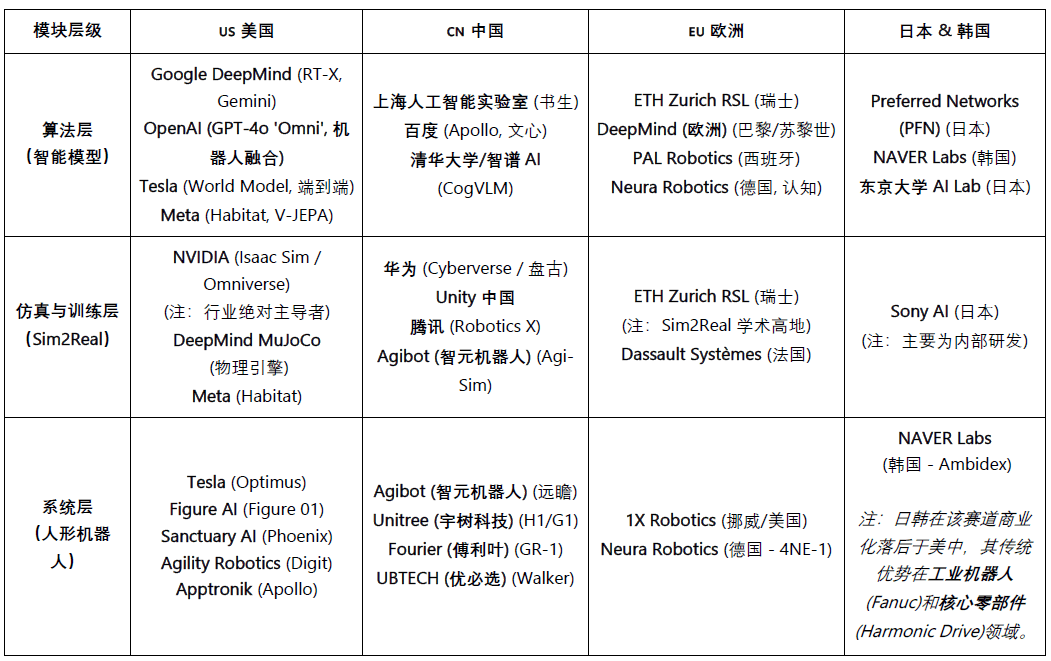
Industri robot global berada di era 'kolaborasi mendominasi, persaingan mendalam'. Efisiensi rantai pasokan China, kemampuan AI AS, presisi komponen Jepang, dan standar industri Eropa bersama-sama membentuk pola jangka panjang industri robot global.
Amerika Serikat tetap terdepan dalam bidang model dan perangkat lunak AI terdepan (DeepMind, OpenAI, NVIDIA), tetapi keunggulan ini tidak meluas ke perangkat keras robot. Perusahaan China memiliki keunggulan dalam kecepatan iterasi dan kinerja dalam skenario nyata. AS mendorong pengembalian industri melalui (Undang-Undang Chip) (CHIPS Act) dan (Undang-Undang Pengurangan Inflasi) (IRA).
China, berkat manufaktur skala besar, integrasi vertikal, dan dorongan kebijakan, telah membentuk keunggulan dalam komponen, pabrik otomatisasi, dan bidang robot humanoid, menonjol dalam kemampuan perangkat keras dan rantai pasokan, dengan Yushu dan UBTECH telah mencapai produksi massal, maju ke lapisan pengambilan keputusan cerdas. Namun, masih ada jarak yang besar dalam lapisan algoritma dan pelatihan simulasi dibandingkan dengan AS.
Jepang lama mendominasi komponen presisi tinggi dan teknologi kontrol gerakan, sistem industri yang stabil, tetapi penggabungan model AI masih berada di tahap awal, ritme inovasi cenderung stabil.
Korea Selatan menonjol dalam penyebaran robot konsumen — dipimpin oleh perusahaan seperti LG, NAVER Labs, dan memiliki ekosistem robot layanan yang kuat dan matang.
Eropa memiliki sistem teknik dan standar keselamatan yang sempurna, 1X Robotics tetap aktif di lapisan penelitian, tetapi beberapa tahap manufaktur berpindah keluar, fokus inovasi cenderung ke arah kolaborasi dan standar.
III. Robot × AI × Web3: Visi Narasi dan Jalur Realitas
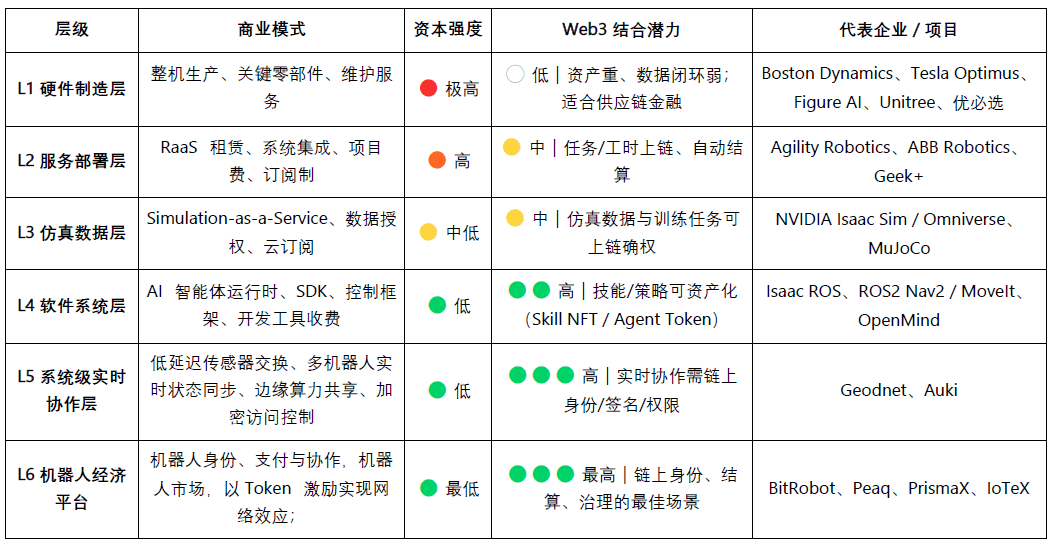
Pada tahun 2025, industri Web3 akan muncul dengan narasi baru yang menggabungkan robot dan AI. Meskipun Web3 dianggap sebagai protokol dasar ekonomi mesin terdesentralisasi, nilai dan kelayakan penggabungan pada berbagai lapisan masih menunjukkan perbedaan yang jelas:
Manufaktur perangkat keras dan layanan bersifat padat modal, dengan loop data yang lemah, Web3 saat ini hanya dapat berperan dalam keuangan rantai pasokan atau penyewaan perangkat di sisi marginal;
Tingkat kecocokan di lapisan ekosistem simulasi dan perangkat lunak cukup tinggi, data simulasi dan tugas pelatihan dapat diakui on-chain, agen dan modul keterampilan juga dapat di-tokenisasi melalui NFT atau Token Agen;
Di lapisan platform, jaringan tenaga kerja dan kolaborasi terdesentralisasi menunjukkan potensi terbesar — Web3 dapat secara bertahap membangun 'pasar tenaga kerja mesin' yang dapat dipercaya melalui mekanisme integrasi identitas, insentif, dan pemerintahan, meletakkan dasar institusi untuk ekonomi mesin di masa depan.
Dari visi jangka panjang, kolaborasi dan lapisan platform adalah arah yang paling berharga dalam penggabungan Web3 dengan robot dan AI. Seiring robot secara bertahap mendapatkan kemampuan persepsi, bahasa, dan pembelajaran, mereka sedang berevolusi menjadi individu cerdas yang dapat mengambil keputusan mandiri, berkolaborasi, dan menciptakan nilai ekonomi. 'Pekerja cerdas' ini benar-benar berpartisipasi dalam sistem ekonomi, masih perlu melewati empat ambang inti identitas, kepercayaan, insentif, dan pemerintahan.
Di lapisan identitas, mesin perlu memiliki identitas digital yang dapat diakui dan ditelusuri. Melalui Machine DID, setiap robot, sensor, atau drone dapat menghasilkan 'KTP' yang unik dan dapat diverifikasi di on-chain, mengikat kepemilikan, catatan perilaku, dan ruang haknya, mewujudkan interaksi yang aman dan definisi tanggung jawab.
Di lapisan kepercayaan, kuncinya adalah memastikan bahwa 'tenaga kerja mesin' dapat diverifikasi, diukur, dan dinilai. Dengan bantuan kontrak pintar, oracle, dan mekanisme audit, serta menggabungkan bukti pekerjaan fisik (PoPW), lingkungan eksekusi yang dapat dipercaya (TEE), dan bukti nol pengetahuan (ZKP), dapat memastikan keaslian dan ketelusuran proses pelaksanaan tugas, sehingga perilaku mesin memiliki nilai dalam akuntansi ekonomi.
Di lapisan insentif, Web3 melalui sistem insentif Token, abstraksi akun, dan saluran status mewujudkan penyelesaian otomatis dan aliran nilai antar mesin. Robot dapat menyelesaikan sewa daya komputasi dan berbagi data melalui pembayaran mikro, serta menjamin kepatuhan tugas dengan mekanisme taruhan dan penalti; dengan bantuan kontrak pintar dan oracle, juga dapat membentuk 'pasar kolaborasi mesin' yang terdesentralisasi tanpa penjadwalan manusia.
Di lapisan pemerintahan, ketika mesin memiliki kemampuan otonomi jangka panjang, Web3 menyediakan kerangka pemerintahan yang transparan dan dapat diprogram: dengan DAO mengatur parameter sistem pengambilan keputusan bersama, dan memelihara keamanan serta ketertiban dengan mekanisme multisig dan reputasi. Dalam jangka panjang, ini akan mendorong masyarakat mesin menuju tahap 'pemerintahan algoritma' — manusia menetapkan tujuan dan batasan, mesin mempertahankan insentif dan keseimbangan melalui kontrak.
Visi akhir integrasi Web3 dan robot: jaringan pengujian lingkungan nyata — 'mesin penalaran dunia nyata' yang terdiri dari robot terdistribusi, terus menguji dan memodelkan kemampuan model dalam berbagai skenario fisik yang beragam dan kompleks; serta pasar tenaga kerja robot — robot yang melakukan tugas nyata yang dapat diverifikasi secara global, mendapatkan imbalan melalui penyelesaian on-chain, dan menginvestasikan kembali nilai tersebut ke dalam daya komputasi atau upgrade perangkat keras.
Dari sudut pandang jalur nyata, penggabungan kecerdasan embodied dan Web3 masih dalam tahap eksplorasi awal, ekonomi mesin cerdas terdesentralisasi lebih banyak berada di tingkat narasi dan komunitas. Dalam kenyataan, arah penggabungan yang memiliki potensi praktis terletak pada tiga aspek berikut:
(1) Crowdsourcing data dan akuisisi hak — Web3 melalui insentif on-chain dan mekanisme pelacakan, mendorong kontributor untuk mengunggah data dunia nyata;
(2) Partisipasi ekor panjang global — pembayaran kecil lintas batas dan mekanisme mikro-insentif secara efektif mengurangi biaya pengumpulan dan distribusi data;
(3) Finansialisasi dan inovasi kolaboratif — model DAO dapat mendorong tokenisasi aset robot, sertifikat pendapatan, dan mekanisme penyelesaian antar mesin.
Secara keseluruhan, jangka pendek terutama terfokus pada lapisan pengumpulan data dan insentif; jangka menengah berpotensi untuk mencapai terobosan di lapisan 'pembayaran stablecoin + pengumpulan data ekor panjang' dan aset RaaS dan penyelesaian; jangka panjang, jika robot humanoid berhasil diadopsi secara luas, Web3 mungkin akan menjadi dasar institusi untuk kepemilikan mesin, distribusi pendapatan, dan pemerintahan, mendorong pembentukan ekonomi mesin terdesentralisasi yang sesungguhnya.
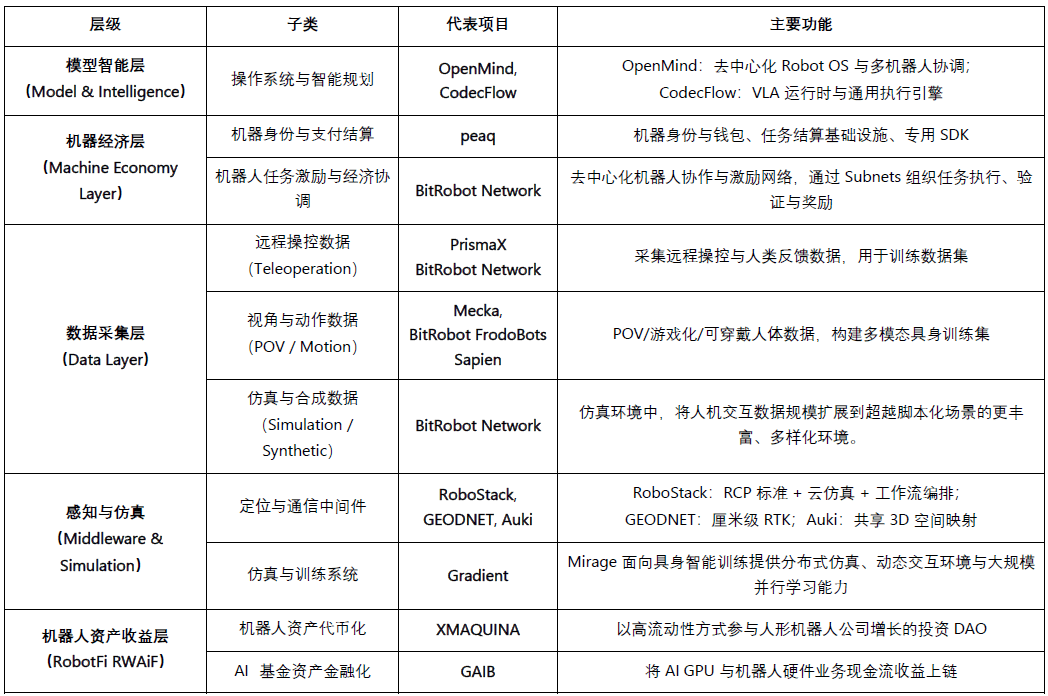
IV. Peta ekosistem robot Web3 dan Kasus Pilihan
Berdasarkan tiga standar 'kemajuan yang dapat diverifikasi, tingkat keterbukaan teknologi, relevansi industri', kami menyusun proyek-proyek representatif saat ini dari Web3 × Robotics, dan mengklasifikasikannya ke dalam lima lapisan arsitektur: lapisan kecerdasan model, lapisan ekonomi mesin, lapisan pengumpulan data, lapisan dasar persepsi dan simulasi, lapisan pendapatan aset robot. Untuk menjaga objektivitas, kami telah menghapus proyek yang jelas 'mencari perhatian' atau kurang informasi; jika ada yang terlewat, silakan beri tahu.
Lapisan kecerdasan model (Model & Intelligence)
Openmind - Membangun Android untuk Robot (https://openmind.org/)
OpenMind adalah sistem operasi sumber terbuka (Robot OS) yang ditujukan untuk AI yang memiliki tubuh (Embodied AI) dan kontrol robot, bertujuan untuk membangun lingkungan operasi robot terdesentralisasi pertama di dunia dan platform pengembangan. Inti proyek mencakup dua komponen besar:
OM1: Runtime AI cerdas modular yang dibangun di atas ROS2 (AI Runtime Layer), digunakan untuk mengatur alur persepsi, perencanaan, dan tindakan, melayani robot digital dan fisik;
FABRIC: Lapisan koordinasi terdistribusi (Fabric Coordination Layer), menghubungkan daya komputasi cloud, model, dan robot nyata, memungkinkan pengembang untuk mengontrol dan melatih robot dalam lingkungan yang terpadu.
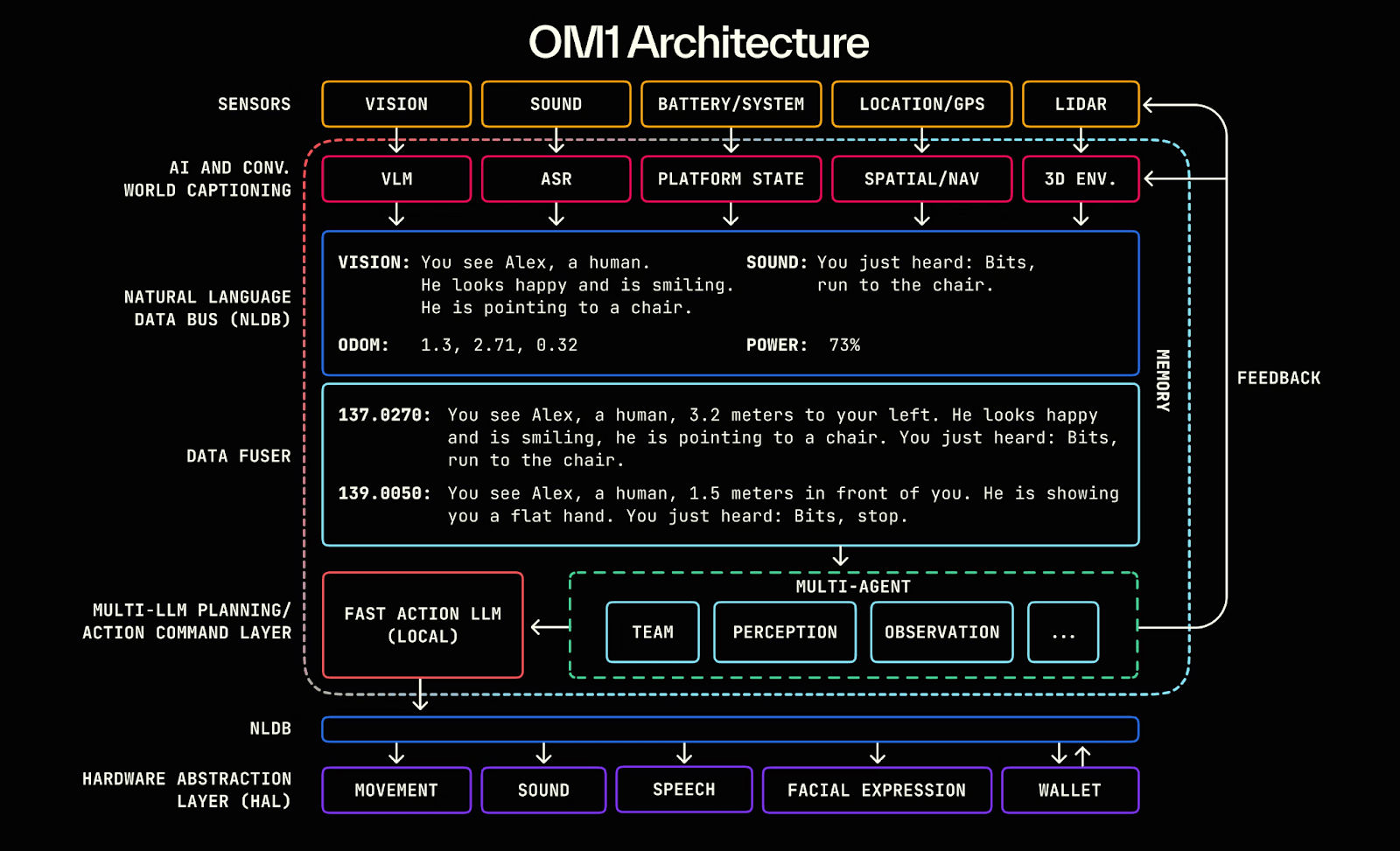
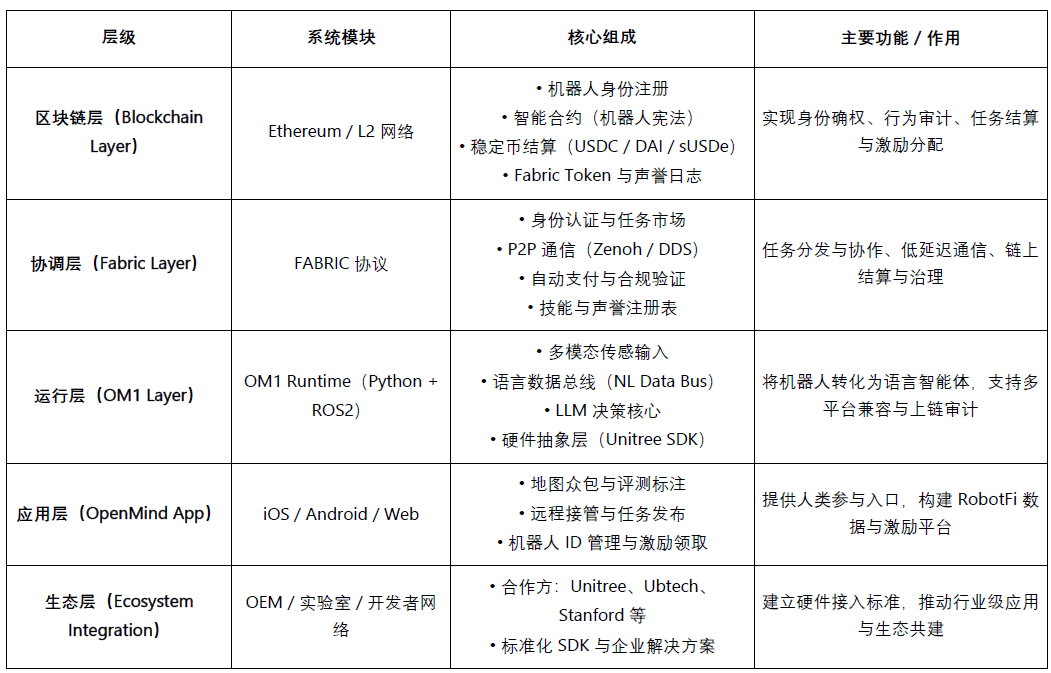
Inti OpenMind adalah berfungsi sebagai lapisan cerdas antara LLM (model bahasa besar) dan dunia robot, mengubah kecerdasan bahasa menjadi kecerdasan embodied (Embodied Intelligence), membangun kerangka cerdas dari pemahaman (Language → Action) hingga penyelarasan (Blockchain → Rules). Sistem multi-lapisan OpenMind mewujudkan siklus kolaborasi yang lengkap: manusia memberikan umpan balik dan penandaan melalui aplikasi OpenMind (data RLHF), Jaringan Fabric bertanggung jawab untuk verifikasi identitas, distribusi tugas, dan koordinasi penyelesaian, Robot OM1 melaksanakan tugas dan mengikuti 'konstitusi robot' di blockchain untuk menyelesaikan audit perilaku dan pembayaran, mewujudkan jaringan kolaborasi mesin terdesentralisasi dari umpan balik manusia → kolaborasi tugas → penyelesaian on-chain.
Kemajuan proyek dan evaluasi realitas
OpenMind berada di tahap awal 'teknologi dapat berjalan, bisnis belum terwujud'. Sistem inti OM1 Runtime telah open-source di GitHub, dapat berjalan di berbagai platform dan mendukung input multimodal, memahami tugas dari bahasa ke tindakan melalui saluran data bahasa alami (NLDB), memiliki orisinalitas tinggi tetapi masih bersifat eksperimental, jaringan Fabric dan penyelesaian on-chain hanya menyelesaikan desain lapisan antarmuka.
Dalam ekosistem, proyek ini telah bekerja sama dengan Unitree, Ubtech, TurtleBot, dan universitas seperti Stanford, Oxford, Seoul Robotics, terutama untuk pendidikan dan verifikasi penelitian, tetapi belum ada komersialisasi. Aplikasi telah meluncurkan versi beta, tetapi fitur insentif dan tugas masih dalam tahap awal.
Dalam hal model bisnis, OpenMind telah membangun ekosistem tiga lapis dari OM1 (sistem sumber terbuka) + Fabric (protokol penyelesaian) + Skill Marketplace (lapisan insentif), saat ini belum menghasilkan pendapatan, bergantung pada pendanaan awal sekitar 20 juta dolar (Pantera, Coinbase Ventures, DCG). Secara keseluruhan, teknologi ini unggul tetapi komersialisasi dan ekosistemnya masih dalam tahap awal, jika Fabric berhasil dilaksanakan, diharapkan dapat menjadi 'Android di era kecerdasan embodied', tetapi siklusnya panjang, risikonya tinggi, dan sangat bergantung pada perangkat keras.
CodecFlow - Mesin Eksekusi untuk Robotika (https://codecflow.ai)
CodecFlow adalah protokol lapisan eksekusi terdesentralisasi berbasis jaringan Solana (Fabric), bertujuan untuk menyediakan lingkungan operasi sesuai permintaan untuk AI cerdas dan sistem robot, memungkinkan setiap agen memiliki 'mesin instan (Instant Machine)'. Inti proyek terdiri dari tiga modul besar:
Fabric: lapisan agregasi daya komputasi lintas cloud (Weaver + Shuttle + Gauge), dapat menghasilkan VM, wadah GPU, atau node kontrol robot yang aman dalam beberapa detik untuk tugas AI;
optr SDK: kerangka eksekusi agen (antarmuka Python), digunakan untuk membuat 'Operator' robot desktop, simulasi, atau nyata yang dapat dioperasikan;
Insentif token: lapisan insentif dan pembayaran on-chain, menghubungkan penyedia komputasi, pengembang agen, dan pengguna tugas otomatis, membentuk pasar daya komputasi dan tugas terdesentralisasi.
Tujuan inti CodecFlow adalah untuk membangun 'dasar eksekusi terdesentralisasi untuk operator AI dan robot', memungkinkan setiap agen berjalan dengan aman di lingkungan mana pun (Windows / Linux / ROS / MuJoCo / pengontrol robot), mewujudkan arsitektur eksekusi umum dari penjadwalan daya komputasi (Fabric) → lingkungan sistem (System Layer) → persepsi dan tindakan (VLA Operator).
Kemajuan proyek dan evaluasi realitas
Telah merilis versi awal dari kerangka Fabric (Go) dan optr SDK (Python), dapat memulai instance daya komputasi terisolasi di lingkungan web atau command line. Pasar Operator diperkirakan akan diluncurkan pada akhir 2025, diposisikan sebagai lapisan eksekusi terdesentralisasi untuk daya komputasi AI,
Sasaran layanan utama mencakup pengembang AI, tim penelitian robot, dan perusahaan operasi otomatis.

Lapisan ekonomi mesin (Machine Economy Layer)
BitRobot - Laboratorium Robot Terbuka Dunia (https://bitrobot.ai)
BitRobot adalah jaringan kolaborasi dan penelitian terdesentralisasi yang ditujukan untuk AI yang memiliki tubuh (Embodied AI) dan pengembangan robot (Open Robotics Lab), diprakarsai oleh FrodoBots Labs dan Protocol Labs. Visi intinya adalah: melalui 'subnet (Subnets) + mekanisme insentif + pekerjaan yang dapat diverifikasi (VRW)' dalam arsitektur terbuka, fungsi intinya mencakup:
Mendefinisikan dan memverifikasi kontribusi nyata setiap tugas robot melalui standar VRW (Verifiable Robotic Work);
Memberikan identitas dan tanggung jawab ekonomi on-chain untuk robot melalui ENT (Embodied Node Token);
Mengorganisir kolaborasi lintas wilayah dalam penelitian, daya komputasi, perangkat, dan operator melalui Subnets;
Mewujudkan keputusan insentif dan pemerintahan penelitian 'kolaborasi manusia-mesin' melalui Senate + Gandalf AI.
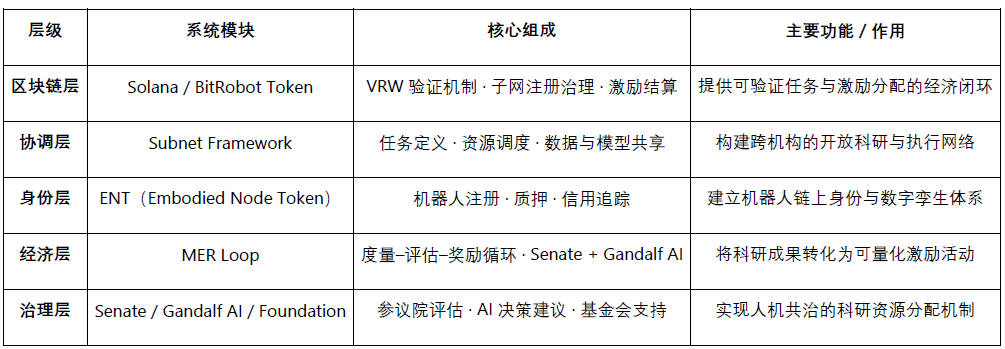
Sejak merilis whitepaper pada tahun 2025, BitRobot telah menjalankan beberapa subnet (seperti SN/01 ET Fugi, SN/05 SeeSaw by Virtuals Protocol), mewujudkan kontrol jarak jauh terdesentralisasi dan pengumpulan data skenario nyata, serta meluncurkan dana $5M Grand Challenges untuk mendorong kompetisi penelitian pengembangan model global.
peaq – Ekonomi Barang (https://www.peaq.network)
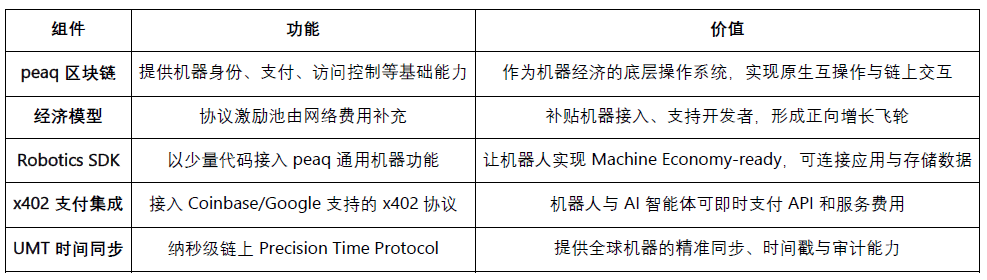
peaq adalah blockchain Layer-1 yang dibangun khusus untuk ekonomi mesin, menyediakan identitas mesin, dompet on-chain, kontrol akses, dan sinkronisasi waktu level nanodetik (Universal Machine Time) untuk jutaan robot dan perangkat. SDK Robotics-nya memungkinkan pengembang untuk membuat robot 'siap ekonomi mesin' dengan sedikit kode, mewujudkan interoperabilitas dan interaksi lintas produsen dan sistem.
Saat ini, peaq telah meluncurkan robot pertanian tokenisasi pertama di dunia, mendukung lebih dari 60 aplikasi mesin dunia nyata. Kerangka tokenisasinya membantu perusahaan robot mengumpulkan dana untuk perangkat keras yang padat modal, dan memperluas cara partisipasi dari tradisional B2B/B2C ke tingkat komunitas yang lebih luas. Berkat kolam insentif tingkat protokol yang disuntikkan oleh biaya jaringan, peaq dapat mensubsidi perangkat baru yang terhubung dan mendukung pengembang, sehingga membentuk roda ekonomi yang mendorong percepatan ekspansi proyek robot dan AI fisik.
Lapisan pengumpulan data (Data Layer)
Bertujuan untuk memecahkan masalah data dunia nyata berkualitas tinggi yang langka dan mahal dalam pelatihan kecerdasan embodied. Mengumpulkan dan menghasilkan data interaksi manusia-mesin melalui berbagai jalur, termasuk kontrol jarak jauh (PrismaX, BitRobot Network), perspektif pertama dan pelacakan gerakan (Mecka, BitRobot Network, Sapien, Vader, NRN), serta data simulasi dan sintesis (BitRobot Network), untuk menyediakan dasar pelatihan yang dapat diperluas dan digeneralisasi untuk model robot.
Perlu dijelaskan bahwa Web3 tidak ahli dalam 'memproduksi data' — dalam hal perangkat keras, algoritma, dan efisiensi pengumpulan, raksasa Web2 jauh melampaui proyek DePIN mana pun. Nilai sebenarnya terletak pada membentuk kembali distribusi data dan mekanisme insentif. Berdasarkan 'jaringan pembayaran stablecoin + model crowdsource', melalui sistem insentif tanpa izin dan mekanisme verifikasi on-chain, mewujudkan penyelesaian mikro berbiaya rendah, pelacakan kontribusi, dan pembagian otomatis. Namun, crowdsource terbuka masih menghadapi tantangan kualitas dan permintaan — kualitas data yang beragam, kurangnya verifikasi efektif dan pembeli yang stabil.
PrismaX (https://gateway.prismax.ai)
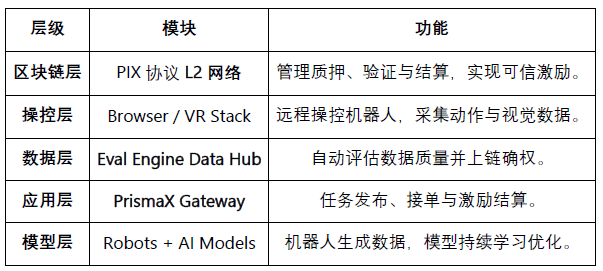
PrismaX adalah jaringan ekonomi data dan kontrol jarak jauh terdesentralisasi yang ditujukan untuk AI yang memiliki tubuh (Embodied AI), bertujuan untuk membangun 'pasar tenaga kerja robot global', memungkinkan operator manusia, perangkat robot, dan model AI untuk berevolusi secara kolaboratif melalui sistem insentif on-chain. Inti proyek mencakup dua komponen besar:
Teleoperation Stack — Sistem kontrol jarak jauh (antarmuka browser/VR + SDK), menghubungkan lengan robot dan robot layanan di seluruh dunia, mewujudkan kontrol waktu nyata oleh manusia dan pengumpulan data;
Eval Engine — Mesin penilaian dan verifikasi data (CLIP + DINOv2 + penilaian semantik aliran), menghasilkan skor kualitas untuk setiap jalur operasi dan menyelesaikannya di on-chain.
PrismaX mengubah perilaku operasi manusia menjadi data pembelajaran mesin melalui mekanisme insentif terdesentralisasi, membangun lingkaran tertutup dari kontrol jarak jauh → pengumpulan data → pelatihan model → penyelesaian on-chain, mewujudkan ekonomi sirkular 'kerja manusia sebagai aset data'.
Kemajuan proyek dan evaluasi realitas: PrismaX telah meluncurkan versi beta pada Agustus 2025 (gateway.prismax.ai), pengguna dapat mengendalikan lengan robot secara jarak jauh untuk melakukan eksperimen pengambilan dan menghasilkan data pelatihan. Eval Engine telah berjalan di dalam, secara keseluruhan, tingkat pencapaian teknologi PrismaX cukup tinggi, dengan penempatan yang jelas, merupakan lapisan tengah kunci yang menghubungkan 'operasi manusia × model AI × penyelesaian blockchain'. Potensi jangka panjangnya diharapkan dapat menjadi 'protokol tenaga kerja dan data terdesentralisasi di era kecerdasan embodied', tetapi dalam jangka pendek masih menghadapi tantangan skala.
BitRobot Network (https://bitrobot.ai/)
BitRobot Network melalui subnetnya mengumpulkan data multi-sumber seperti video, kontrol jarak jauh, dan simulasi. SN/01 ET Fugi memungkinkan pengguna mengendalikan robot dari jarak jauh untuk menyelesaikan tugas, dalam interaksi 'versi nyata dari Pokémon Go' mengumpulkan data navigasi dan persepsi. Gaya permainan ini melahirkan kumpulan data FrodoBots-2K, salah satu kumpulan data open source terbesar untuk navigasi manusia-robot saat ini, digunakan oleh lembaga seperti UC Berkeley RAIL dan Google DeepMind. SN/05 SeeSaw (Protokol Virtual) mengumpulkan data video perspektif pertama secara besar-besaran melalui iPhone di lingkungan nyata. Subnet lain yang telah diumumkan, seperti RoboCap dan Rayvo, berfokus pada penggunaan perangkat fisik berbiaya rendah untuk mengumpulkan data video perspektif pertama.
Mecka (https://www.mecka.ai)
Mecka adalah perusahaan data robot, melalui pengumpulan permainan ponsel dan perangkat keras kustom, mendapatkan video perspektif pertama, data gerakan manusia, dan demonstrasi tugas secara crowdsource, untuk membangun kumpulan data multimodal berskala besar, mendukung pelatihan model kecerdasan embodied.
Sapien (https://www.sapien.io/)
Sapien adalah platform crowdsource yang berfokus pada 'data gerakan manusia yang mendorong kecerdasan robot', mengumpulkan data gerakan, postur, dan interaksi manusia melalui perangkat yang dapat dikenakan dan aplikasi seluler, untuk melatih model kecerdasan embodied. Proyek ini bertujuan untuk membangun jaringan data gerakan manusia terbesar di dunia, menjadikan perilaku alami manusia sebagai sumber data dasar untuk pembelajaran dan generalisasi robot.
Vader (https://www.vaderai.ai)
Vader mengumpulkan video perspektif pertama dan demonstrasi tugas melalui aplikasi MMO dunia nyata EgoPlay: pengguna merekam aktivitas sehari-hari dari perspektif orang pertama dan mendapatkan imbalan $VADER. Saluran data ORN-nya dapat mengubah gambar POV mentah menjadi kumpulan data terstruktur yang telah diproses untuk privasi, mencakup label tindakan dan narasi semantik, dapat langsung digunakan untuk pelatihan strategi robot humanoid.
NRN Agents (https://www.nrnagents.ai/)
Sebuah platform data RL yang digenerasikan melalui permainan, mengumpulkan data demonstrasi manusia melalui kontrol robot berbasis browser dan kompetisi simulasi. NRN menghasilkan jalur perilaku ekor panjang melalui tugas 'kompetitif' untuk pembelajaran tiruan dan pembelajaran penguatan berkelanjutan, serta sebagai primitif data yang dapat diperluas untuk mendukung pelatihan strategi sim-to-real.
Perbandingan proyek lapisan pengumpulan data kecerdasan embodied

Persepsi dan simulasi (Middleware & Simulation)
Lapisan persepsi dan simulasi menyediakan infrastruktur inti untuk menghubungkan dunia fisik dengan keputusan cerdas, termasuk kemampuan pemetaan, komunikasi, pemodelan ruang, pelatihan simulasi, dll., merupakan 'kerangka lapisan tengah' untuk membangun sistem kecerdasan embodied berskala besar. Saat ini, bidang ini masih berada dalam tahap eksplorasi awal, masing-masing proyek membentuk tata letak yang berbeda dalam presisi pemetaan tinggi, komputasi ruang bersama, standarisasi protokol, dan simulasi terdistribusi, belum muncul standar seragam atau ekosistem yang saling terhubung.
Middleware dan infrastruktur ruang (Middleware & Spatial Infra)
Kemampuan inti robot — navigasi, pemetaan, konektivitas, dan pemodelan ruang — membentuk jembatan kunci yang menghubungkan dunia fisik dengan keputusan cerdas. Meskipun proyek DePIN yang lebih luas (Silencio, WeatherXM, DIMO) mulai menyebut 'robot', proyek-proyek berikut paling relevan dengan kecerdasan embodied.
RoboStack – Cloud-Native Robot Operating Stack (https://robostack.io)
RoboStack adalah middleware robot cloud-native, mewujudkan penjadwalan tugas robot secara waktu nyata, kontrol jarak jauh, dan interoperabilitas lintas platform melalui RCP (Robot Context Protocol), serta menyediakan kemampuan simulasi cloud, pengaturan alur kerja, dan akses Agen.
GEODNET – Jaringan GNSS Terdesentralisasi (https://geodnet.com)
GEODNET adalah jaringan GNSS terdesentralisasi global, menyediakan penentuan posisi RTK presisi tinggi pada level sentimeter. Melalui stasiun terdistribusi dan insentif on-chain, menyediakan 'lapisan acuan geografis' waktu nyata untuk drone, kendaraan otonom, dan robot.
Auki – Posemesh untuk Komputasi Spasial (https://www.auki.com)
Auki membangun jaringan komputasi Posemesh terdesentralisasi, menghasilkan peta lingkungan 3D waktu nyata melalui sensor dan node komputasi crowdsource, menyediakan dasar ruang berbagi untuk AR, navigasi robot, dan kolaborasi multi-perangkat. Ini adalah infrastruktur dasar yang menghubungkan ruang virtual dan skenario nyata, mendorong penggabungan AR × Robotika.
Tashi Network — Jaringan kolaborasi grid waktu nyata untuk robot (https://tashi.network)
Jaringan grid waktu nyata terdesentralisasi, mewujudkan konsensus di bawah 30ms, pertukaran sensor latensi rendah, dan sinkronisasi status multi-robot. SDK MeshNet mendukung pembagian SLAM, kolaborasi kelompok, dan pembaruan peta yang tangguh, menyediakan lapisan kolaborasi waktu nyata berkinerja tinggi untuk AI yang memiliki tubuh.
Staex — Jaringan koneksi dan pengukuran terdesentralisasi (https://www.staex.io)
Lapisan koneksi terdesentralisasi yang berasal dari departemen R&D Deutsche Telekom, menyediakan komunikasi yang aman, pengukuran yang dapat dipercaya, dan kemampuan routing dari perangkat ke cloud, memungkinkan armada robot untuk bertukar data secara handal dan berkolaborasi lintas operator yang berbeda.
Sistem simulasi dan pelatihan (Distributed Simulation & Learning)
Gradient - Menuju Kecerdasan Terbuka (https://gradient.network/)
Gradient adalah laboratorium AI yang membangun 'Kecerdasan Terbuka (Open Intelligence)', berkomitmen untuk mewujudkan pelatihan terdistribusi, penalaran, verifikasi, dan simulasi berbasis infrastruktur terdesentralisasi; tumpukan teknologinya saat ini mencakup Parallax (penalaran terdistribusi), Echo (pembelajaran penguatan terdistribusi dan pelatihan multi-agen), dan Gradient Cloud (solusi AI untuk perusahaan). Dalam arah robot, platform Mirage menyediakan kemampuan simulasi terdistribusi, lingkungan interaksi dinamis, dan pembelajaran paralel berskala besar untuk mempercepat pelatihan model dunia dan strategi umum. Mirage sedang menjajaki arah kolaborasi potensial dengan engine Newton dari NVIDIA.
Lapisan pendapatan aset robot (RobotFi / RWAiFi)
Lapisan ini berfokus pada transisi robot dari 'alat produksi' menjadi 'aset yang dapat dibiayai', membangun infrastruktur keuangan untuk ekonomi mesin melalui tokenisasi aset, distribusi pendapatan, dan pemerintahan terdesentralisasi. Proyek representatif mencakup:
XmaquinaDAO – DAO AI Fisik (https://www.xmaquina.io)
XMAQUINA adalah ekosistem terdesentralisasi yang menyediakan saluran partisipasi likuiditas tinggi untuk pengguna global terhadap robot humanoid terkemuka dan perusahaan kecerdasan embodied, membawa peluang yang sebelumnya hanya milik lembaga investasi berisiko ke dalam blockchain. Token-nya DEUS berfungsi sebagai aset indeks likuiditas dan juga sebagai wadah pemerintahan, digunakan untuk mengoordinasikan distribusi kas dan pengembangan ekosistem. Melalui DAO Portal dan Machine Economy Launchpad, komunitas dapat berpartisipasi secara on-chain melalui tokenisasi aset mesin dan struktural, memiliki bersama dan mendukung proyek-proyek AI Fisik yang sedang berkembang.
GAIB – Lapisan Ekonomi untuk Infrastruktur AI (https://gaib.ai/)
GAIB bertujuan untuk memberikan lapisan ekonomi yang bersatu untuk infrastruktur AI seperti GPU dan robot, menghubungkan modal terdesentralisasi dengan aset infrastruktur AI nyata, membangun sistem ekonomi cerdas yang dapat diverifikasi, dapat digabungkan, dan menghasilkan pendapatan. Tujuannya adalah untuk menjadi tulang punggung ekonomi (Economic Backbone of Intelligence) di era AI.
Dalam arah robot, GAIB bukanlah 'menjual token robot', tetapi melalui finansialisasi perangkat robot dan kontrak operasi (RaaS, pengumpulan data, operasi jarak jauh, dll.) ke dalam blockchain, mewujudkan transformasi 'arus kas nyata → aset pendapatan yang dapat digabungkan di on-chain'. Sistem ini mencakup pembiayaan perangkat keras (leasing/pengikatan), arus kas operasi (RaaS/layanan data) dan pendapatan aliran data (lisensi/kontrak), membuat aset robot dan arus kasnya menjadi terukur, dapat dinilai, dan dapat diperdagangkan.
GAIB menggunakan AID / sAID sebagai pembawa penyelesaian dan pendapatan, melalui mekanisme pengendalian risiko terstruktur (over-collateralization, cadangan, dan asuransi) untuk memastikan pengembalian yang stabil, serta terhubung dengan derivatif DeFi dan pasar likuiditas dalam jangka panjang, membentuk lingkaran keuangan dari 'aset robot' menjadi 'aset pendapatan yang dapat digabungkan'. Tujuannya adalah menjadi tulang punggung ekonomi di era AI (Economic Backbone of Intelligence)

Peta ekosistem robot Web3: https://fairy-build-97286531.figma.site/
V. Kesimpulan dan Harapan: Tantangan Realitas dan Peluang Jangka Panjang
Dari visi jangka panjang, penggabungan robot × AI × Web3 bertujuan untuk membangun sistem ekonomi mesin terdesentralisasi (DeRobot Economy), mendorong kecerdasan embodied dari 'otomatisasi mandiri' menuju kolaborasi yang 'dapat diakui, dapat diselesaikan, dan dapat dikelola'. Logika intinya adalah melalui 'Token → penyebaran → data → redistribusi nilai' membentuk mekanisme siklus mandiri, sehingga robot, sensor, dan node daya komputasi dapat diakui, diperdagangkan, dan dibagi hasilnya.
Namun, dari sudut pandang tahap nyata, model ini masih dalam tahap eksplorasi awal, jauh dari membentuk aliran kas yang stabil dan lingkaran komersial berskala. Sebagian besar proyek masih berada di tingkat narasi, dengan penerapan nyata yang terbatas. Manufaktur dan operasi robot adalah industri yang padat modal, hanya mengandalkan insentif token tidak cukup untuk mendukung ekspansi infrastruktur; desain keuangan on-chain meskipun memiliki kemampuan untuk digabungkan, tetapi belum menyelesaikan masalah penilaian risiko dan penerimaan pendapatan dari aset nyata. Oleh karena itu, yang disebut 'siklus mandiri jaringan mesin' masih cenderung idealistis, model bisnisnya masih perlu divalidasi secara nyata.
Lapisan kecerdasan model (Model & Intelligence Layer) adalah arah paling berharga dalam jangka panjang saat ini. Dengan OpenMind sebagai perwakilan dari sistem operasi robot sumber terbuka, mencoba untuk memecahkan ekosistem tertutup, menyatukan kolaborasi multimodal robot dan antarmuka bahasa ke tindakan. Visi teknologinya jelas, sistem lengkap, tetapi beban kerja sangat besar, siklus verifikasi panjang, dan belum membentuk umpan balik positif tingkat industri.
Lapisan ekonomi mesin (Machine Economy Layer) masih berada di tahap awal, dalam kenyataan jumlah robot terbatas, identitas DID dan jaringan insentif masih sulit membentuk siklus yang koheren. Saat ini masih jauh dari 'ekonomi tenaga kerja mesin'. Di masa depan, hanya setelah kecerdasan embodied mencapai penerapan skala, efek ekonomi dari identitas on-chain, penyelesaian, dan jaringan kolaborasi yang akan benar-benar terlihat.
Lapisan pengumpulan data (Data Layer) memiliki ambang batas relatif terendah, namun saat ini merupakan arah yang paling mendekati kelayakan komersial. Pengumpulan data kecerdasan embodied memiliki permintaan sangat tinggi untuk kontinuitas ruang dan waktu serta akurasi semantik tindakan, menentukan kualitas dan kemanfaatannya. Bagaimana menyeimbangkan antara 'skala crowdsource' dan 'keandalan data' adalah tantangan inti industri. PrismaX terlebih dahulu mengunci permintaan sisi B, lalu mendistribusikan tugas untuk pengumpulan verifikasi dalam tingkat tertentu menyediakan template yang dapat direplikasi, tetapi skala ekosistem dan perdagangan data masih memerlukan akumulasi waktu.
Lapisan persepsi dan simulasi (Middleware & Simulation Layer) masih dalam periode verifikasi teknologi, kurang standar yang seragam dan antarmuka belum membentuk ekosistem yang saling terhubung. Hasil simulasi sulit untuk dipindahkan secara standar ke lingkungan nyata, efisiensi Sim2Real terbatas.
Lapisan pendapatan aset (RobotFi / RWAiFi) Web3 terutama berperan dalam keuangan rantai pasokan, penyewaan peralatan dan pemerintahan investasi, meningkatkan transparansi dan efisiensi penyelesaian, bukan merombak logika industri.
Tentu saja, kami percaya bahwa titik pertemuan robot × AI × Web3 tetap mewakili titik awal dari generasi baru sistem ekonomi cerdas. Ini bukan hanya penggabungan paradigma teknis, tetapi juga kesempatan untuk merombak hubungan produksi: ketika mesin memiliki identitas, insentif, dan mekanisme pemerintahan, kolaborasi manusia-mesin akan bergerak dari otomatisasi parsial menuju otonomi jaringan. Dalam jangka pendek, arah ini masih didominasi oleh narasi dan eksperimen, tetapi kerangka institusi dan insentif yang dibangunnya sedang meletakkan dasar bagi tatanan ekonomi masa depan mesin. Dari perspektif jangka panjang, penggabungan kecerdasan embodied dan Web3 akan merombak batas penciptaan nilai — menjadikan agen cerdas sebagai subjek ekonomi yang benar-benar dapat diakui, dapat berkolaborasi, dan dapat menghasilkan pendapatan.
Penafian: Artikel ini dalam proses penulisannya dibantu oleh alat AI ChatGPT-5 dan Deepseek, penulis telah berusaha sebaik mungkin untuk memeriksa dan memastikan informasi yang akurat, tetapi masih mungkin terdapat kelalaian, mohon dimaklumi. Perlu dicatat bahwa pasar aset kripto umumnya menghadapi situasi di mana dasar proyek dan kinerja harga di pasar sekunder tidak sejalan. Konten ini hanya digunakan untuk pengumpulan informasi dan komunikasi akademis/penelitian, tidak dianggap sebagai saran investasi, dan tidak boleh dipandang sebagai rekomendasi untuk membeli atau menjual token apa pun.