Le persone tendono a pensare che dotare i robot di un cervello basato su un grande modello linguistico li aiuti a integrarsi perfettamente nel mondo fisico.
Ma la realtà è che, quando un braccio robotico o un drone gestisce istruzioni complesse, questo processo di esecuzione 'scatola nera' è inquietante. Se rompe una provetta in laboratorio, gli esseri umani non possono distinguere se si tratta di un guasto hardware o di un'illusione algoritmica.
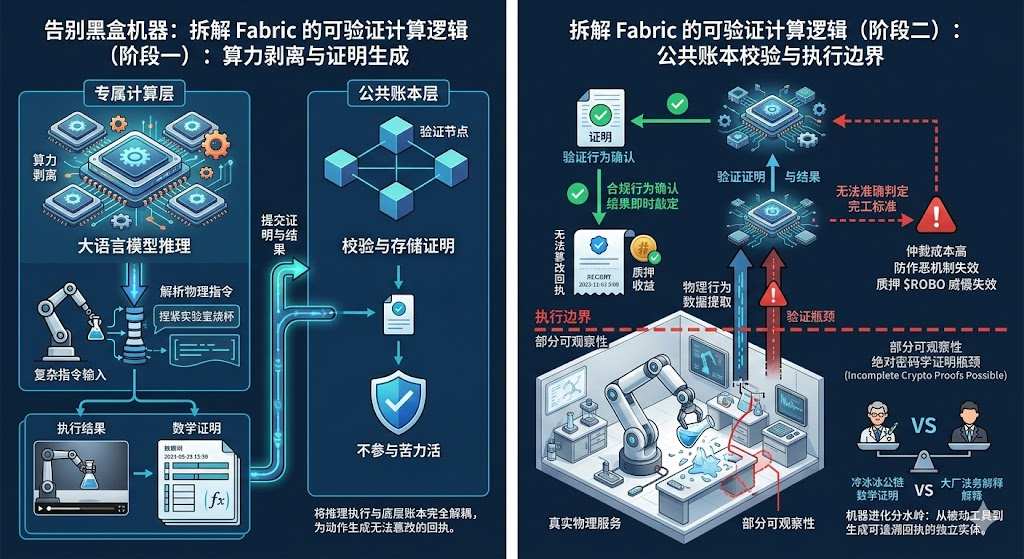
Di fronte a questa opacità a livello di esecuzione, @Fabric Foundation la soluzione proposta è quella di abbandonare completamente l'architettura a rete monolitica.
La vera base della cooperazione tra macchine non è l'accumulo irrazionale di potenza di calcolo, ma la completa separazione dell'esecuzione del ragionamento dal libro mastro sottostante, generando una ricevuta inalterabile per ogni azione #ROBO .
Il nucleo del protocollo è scomporre l'intera rete in moduli indipendenti e strettamente collaborativi.
In primo luogo, si tratta di separare la potenza di calcolo; l'intelligenza delle macchine opera su un livello di calcolo dedicato, responsabile dell'esecuzione di algoritmi complessi e dell'analisi delle istruzioni delle azioni fisiche.
In secondo luogo, si tratta di generare prove matematiche; il livello di calcolo, mentre ottiene il risultato dell'esecuzione, impacchetta simultaneamente le prove, proprio come i piatti in cucina devono essere accompagnati da un registro delle operazioni con timbro temporale.
Infine c'è la verifica del libro mastro pubblico, il libro mastro di livello superiore non partecipa affatto al lavoro faticoso che consuma potenza di calcolo, ma è responsabile solo della verifica delle prove presentate dal livello di calcolo, confermando la conformità delle azioni e finalizzando il risultato in tempo reale.
Tuttavia, questo meccanismo rigoroso affronta confini di esecuzione severi quando si estende al mondo fisico.
Il white paper ammette che i servizi fisici reali spesso hanno una parziale osservabilità e non tutte le azioni complesse nel mondo reale possono essere perfettamente estratte in prove crittografiche assolute.
Se il compito è estremamente complesso e porta il sistema a non poter determinare con precisione gli standard di completamento, anche se nella rete sono stati impegnati enormi $ROBO come deterrente per le sanzioni, questo meccanismo puramente basato sul gioco economico potrebbe comunque fallire.
Se questo canale di verifica basato su prove può resistere agli impatti ad alta frequenza dell'ambiente fisico reale e il costo della verifica computazionale può essere efficacemente controllato, è molto probabile che entro la fine dell'anno vedremo i primi gruppi di macchine in grado di autofinanziarsi tramite ricevute.
Al contrario, se i confini della verifica del comportamento fisico non possono essere definiti chiaramente per lungo tempo, o se il costo del conflitto per contestare l'arbitrato è troppo elevato, questo circuito chiuso sovrano avrà difficoltà a uscire dal laboratorio degli appassionati.
Dallo strumento passivo a un'entità indipendente in grado di generare ricevute tracciabili, è questo il punto di svolta nell'evoluzione delle macchine.
Quando un robot sbaglia un compito, ti fidi di più della spiegazione del legale di una grande azienda o della fredda prova matematica su una blockchain?