Quando sento le persone parlare di governance decentralizzata della robotica, la mia prima reazione non è entusiasmo. È cautela. Non perché l'idea manchi di ambizione, ma perché la robotica ha sempre portato con sé un problema di governance molto prima di diventare un problema tecnico. Le macchine che si muovono, percepiscono e agiscono nel mondo reale sollevano inevitabilmente domande su controllo, responsabilità e coordinamento. La sfida non è mai stata solo costruire robot capaci. La vera sfida è stata decidere chi governa cosa sono autorizzati a fare quei robot.
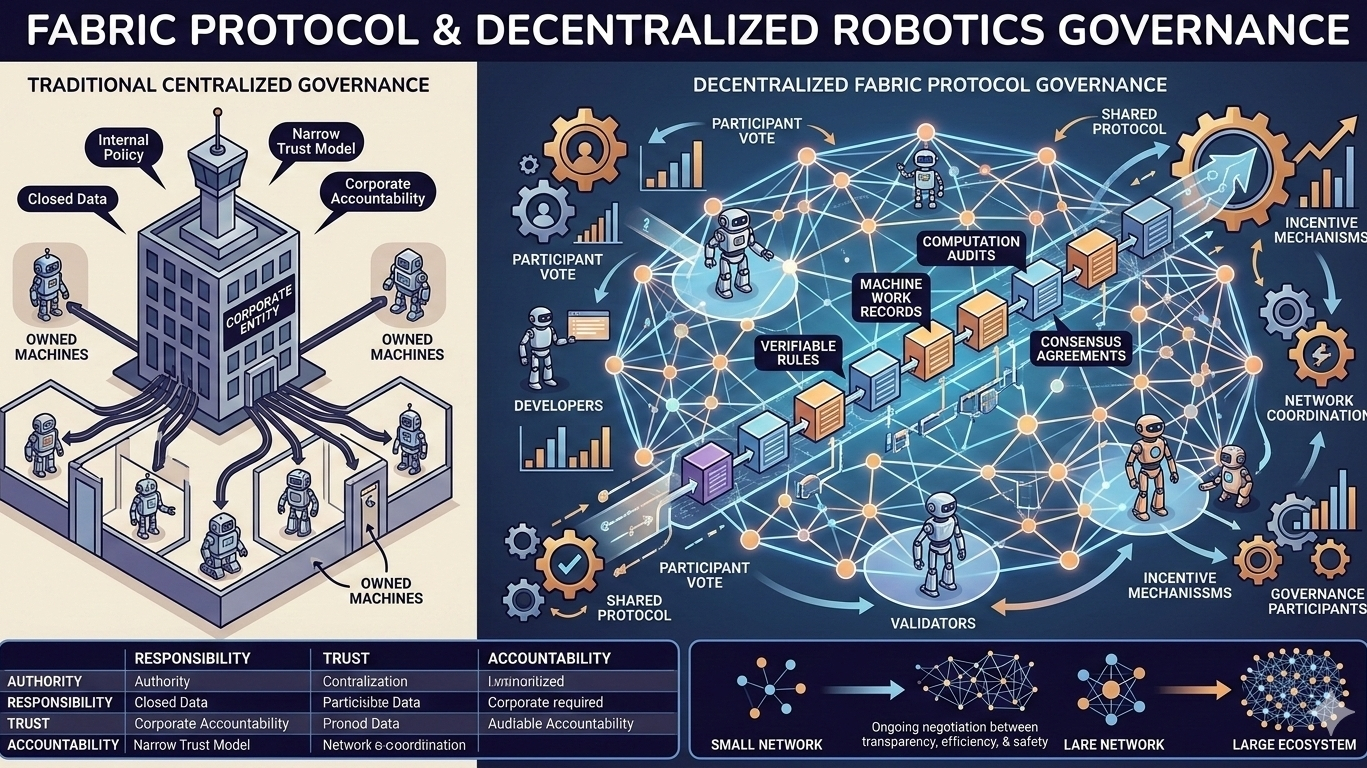
La maggior parte dei sistemi robotici oggi operano in ambienti chiusi in cui la governance è centralizzata per default. Un'azienda che distribuisce le macchine controlla i dati che raccolgono, definisce le regole che seguono e alla fine decide come quei sistemi evolvono. Questo funziona abbastanza bene per distribuzioni isolate, ma crea un modello di fiducia ristretto. Se l'organizzazione che controlla i robot cambia le sue priorità, il framework di governance cambia con esso. La responsabilità diventa una politica aziendale piuttosto che un protocollo condiviso.
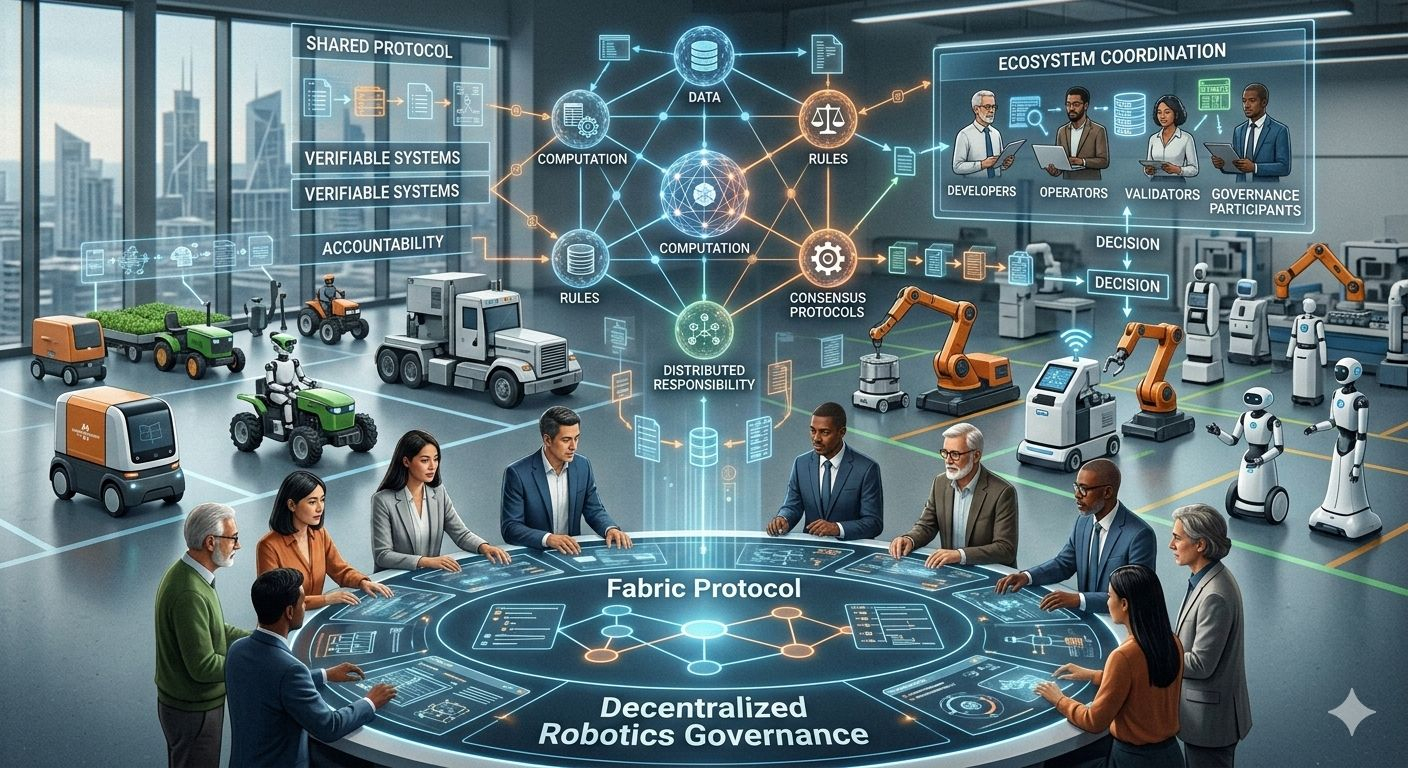
Questo è il contesto in cui Fabric Protocol inizia a sembrare meno un framework robotico e più un cambiamento infrastrutturale. Invece di trattare la governance come uno strato di politica interna, la tratta come una funzione di rete. Le decisioni sul comportamento della macchina, sull'uso dei dati e sulla verifica computazionale si spostano da operatori isolati a un ambiente condiviso coordinato attraverso sistemi verificabili. La governance diventa qualcosa che i partecipanti possono osservare, auditare e influenzare piuttosto che semplicemente accettare.
La cosa importante qui è che la governance non scompare quando diventa decentralizzata. Si sposta semplicemente in una struttura diversa. Se i robot si coordinano attraverso una rete in cui i dati, i calcoli e le regole sono registrati e verificati, allora il protocollo stesso diventa l'ambiente in cui l'autorità viene negoziata. I partecipanti contribuiscono con risorse, convalidano risultati e applicano politiche attraverso un'infrastruttura condivisa piuttosto che attraverso un controllo centralizzato.
Quel cambiamento modifica chi porta la responsabilità per l'attività della macchina. Nelle distribuzioni robotiche tradizionali, l'organizzazione che gestisce il sistema possiede effettivamente ogni strato di controllo. Definiscono come operano i modelli, come vengono eseguite le decisioni e come viene gestita la responsabilità quando qualcosa fallisce. In un framework decentralizzato, la responsabilità si diffonde su un insieme più ampio di attori. Gli sviluppatori costruiscono i sistemi, gli operatori distribuiscono le macchine, i validatori verificano i calcoli e i partecipanti alla governance influenzano le regole politiche.
Una volta che distribuisci la responsabilità in questo modo, l'architettura della fiducia cambia. Invece di fidarsi di un'unica entità per gestire il comportamento della macchina, i partecipanti si affidano a calcoli verificabili e registri condivisi per confermare che il lavoro robotico è stato eseguito correttamente. Il protocollo diventa uno strato di coordinamento in cui le azioni delle macchine possono essere registrate, valutate e convalidate dalla rete stessa.
Ciò non significa che la complessità scompaia. In effetti, la governance decentralizzata spesso introduce nuovi strati di design operativo. Le regole devono essere codificate in modi che le macchine e le reti possano interpretare. Le dispute devono avere percorsi di risoluzione. I sistemi di verifica devono garantire che il lavoro della macchina corrisponda a ciò che il protocollo afferma sia realmente accaduto. La governance diventa meno riguardante l'autorità e più riguardante il design del sistema.
La parte interessante è come questo design inizia a plasmare gli incentivi. Se il lavoro robotico diventa verificabile all'interno di una rete, allora i contributi delle macchine possono essere misurati, coordinati e potenzialmente ricompensati in modi che le piattaforme robotiche tradizionali raramente supportano. I dati diventano più portabili. Il calcolo diventa più trasparente. La partecipazione diventa qualcosa che può scalare oltre i confini di una singola organizzazione.
Questo crea la possibilità di ecosistemi robotici piuttosto che distribuzioni isolate. Le macchine costruite da diversi sviluppatori potrebbero operare in un ambiente di governance condiviso in cui le regole sono negoziate collettivamente. I dati fluiscono tra i partecipanti attraverso protocolli trasparenti piuttosto che pipeline proprietarie. La rete inizia a funzionare meno come una piattaforma e più come uno strato operativo per la collaborazione delle macchine.
Certo, questo introduce anche nuovi punti di fallimento. I sistemi di governance possono diventare lenti, frammentati o eccessivamente complessi se la partecipazione si espande più velocemente di quanto i meccanismi di coordinamento evolvano. Le decisioni che una volta avvenivano internamente potrebbero richiedere un accordo a livello di rete. Le politiche che una volta cambiavano rapidamente potrebbero richiedere un consenso deliberato. La stessa decentralizzazione che migliora la trasparenza può a volte rallentare la reattività.
Questa tensione è inevitabile. Ogni sistema decentralizzato affronta lo stesso atto di bilanciamento tra apertura ed efficienza. Troppo controllo centrale e il sistema perde credibilità come infrastruttura condivisa. Troppa frammentazione e il coordinamento diventa difficile. La vera prova della governance robotica decentralizzata è se i protocolli possono mantenere sia la fiducia che l'affidabilità operativa man mano che la rete cresce.
Ciò che Fabric Protocol suggerisce è che la robotica potrebbe entrare in una fase in cui l'infrastruttura di governance diventa altrettanto importante quanto la capacità meccanica. I robot possiedono già un'autonomia crescente. Raccolgono dati, prendono decisioni e svolgono compiti che influenzano gli ambienti fisici. Man mano che quelle capacità si espandono, i sistemi che governano il loro comportamento diventano pezzi critici dello stack tecnologico.
In questo senso, la governance robotica decentralizzata riguarda meno la rimozione dell'autorità e più la sua ristrutturazione. L'autorità si sposta dalle istituzioni ai protocolli, dalle politiche interne ai sistemi verificabili, dagli operatori isolati ai partecipanti di rete. L'obiettivo non è semplicemente distribuire il potere, ma rendere il comportamento delle macchine osservabile e responsabile all'interno di ecosistemi più ampi.
La vera domanda è come si comportano questi sistemi di governance una volta che i robot iniziano a operare su scala. In piccole reti, il coordinamento sembra gestibile. In grandi ecosistemi con migliaia di macchine e partecipanti, la governance diventa una negoziazione continua tra trasparenza, efficienza e sicurezza. Il valore a lungo termine di protocolli come Fabric dipenderà da quanto bene mantengono quel equilibrio quando la rete smette di essere teorica e inizia a gestire l'attività reale delle macchine.
Quindi, quando penso alla governance robotica decentralizzata, non mi concentro immediatamente sulla promessa della collaborazione aperta. Mi concentro sull'infrastruttura che deve supportarla. Perché il successo di questo modello non sarà determinato da quanto bene l'idea suona in teoria. Sarà determinato da se i sistemi che coordinano macchine, dati e decisioni rimarranno affidabili quando la rete diventa grande, complessa e imprevedibile.
@Fabric Foundation $ROBO #ROBO

