Quando sento le persone parlare di innovazione robotica aperta, la mia prima reazione non è l'eccitazione per le nuove macchine o le dimostrazioni di automazione che eseguono compiti complessi, ma curiosità per l'infrastruttura che rende possibili quelle macchine in primo luogo, perché la robotica non diventa veramente aperta semplicemente pubblicando progetti o consentendo agli sviluppatori di costruire applicazioni, diventa aperta solo quando il coordinamento sottostante di dati, calcolo, proprietà e governance è strutturato in modo che più partecipanti possano contribuire e beneficiare senza fare affidamento su un'unica autorità centrale per definire le regole.

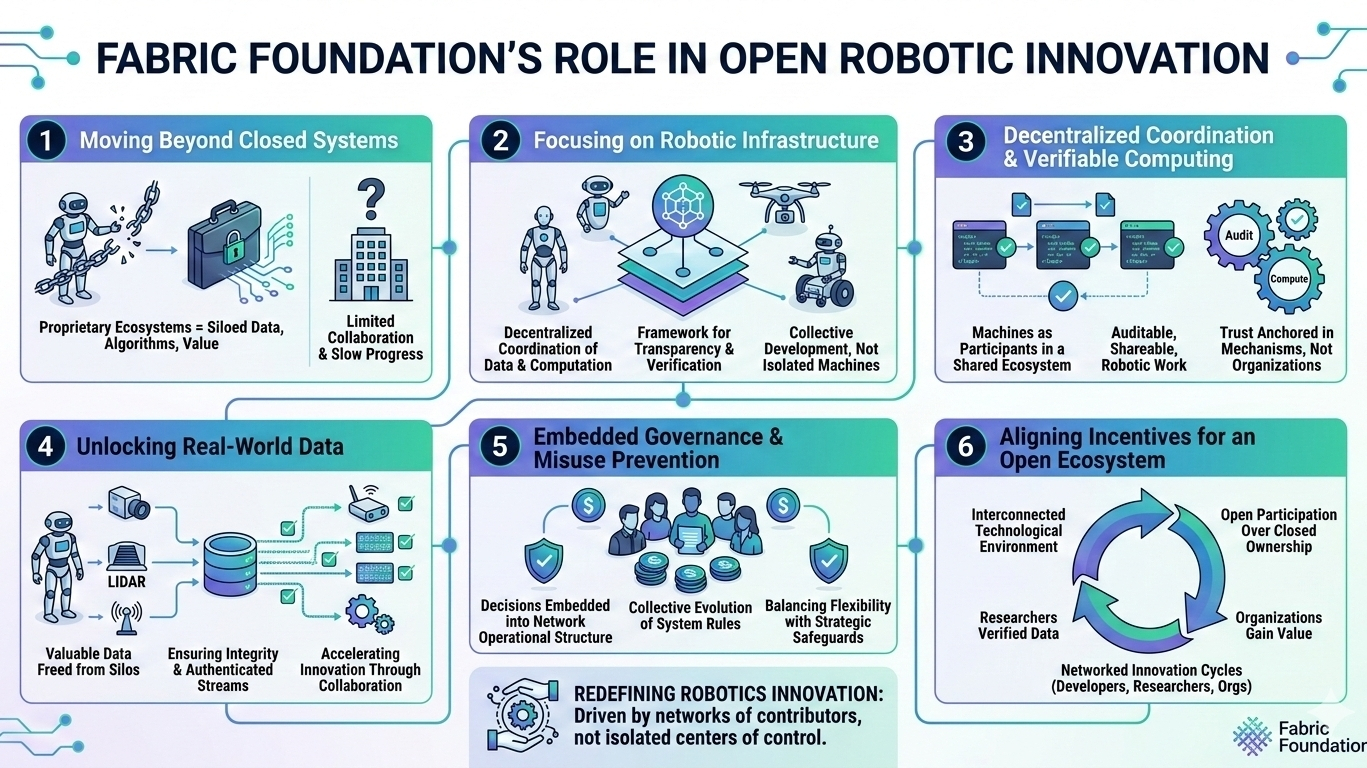
Per anni, l'industria della robotica ha operato all'interno di un modello in cui l'innovazione è tecnicamente impressionante ma strutturalmente chiusa, il che significa che le aziende costruiscono potenti sistemi robotici, ma i dati che generano, gli algoritmi che li guidano e il valore economico che producono rimangono bloccati all'interno di ecosistemi proprietari che limitano la collaborazione e impediscono alle comunità di ricerca e sviluppo più ampie di partecipare all'evoluzione della tecnologia. Questo assetto ha prodotto macchine straordinarie, ma ha anche creato un ambiente in cui i progressi dipendono fortemente dalle risorse e dalle priorità di poche organizzazioni piuttosto che dall'intelligenza collettiva di una rete globale.
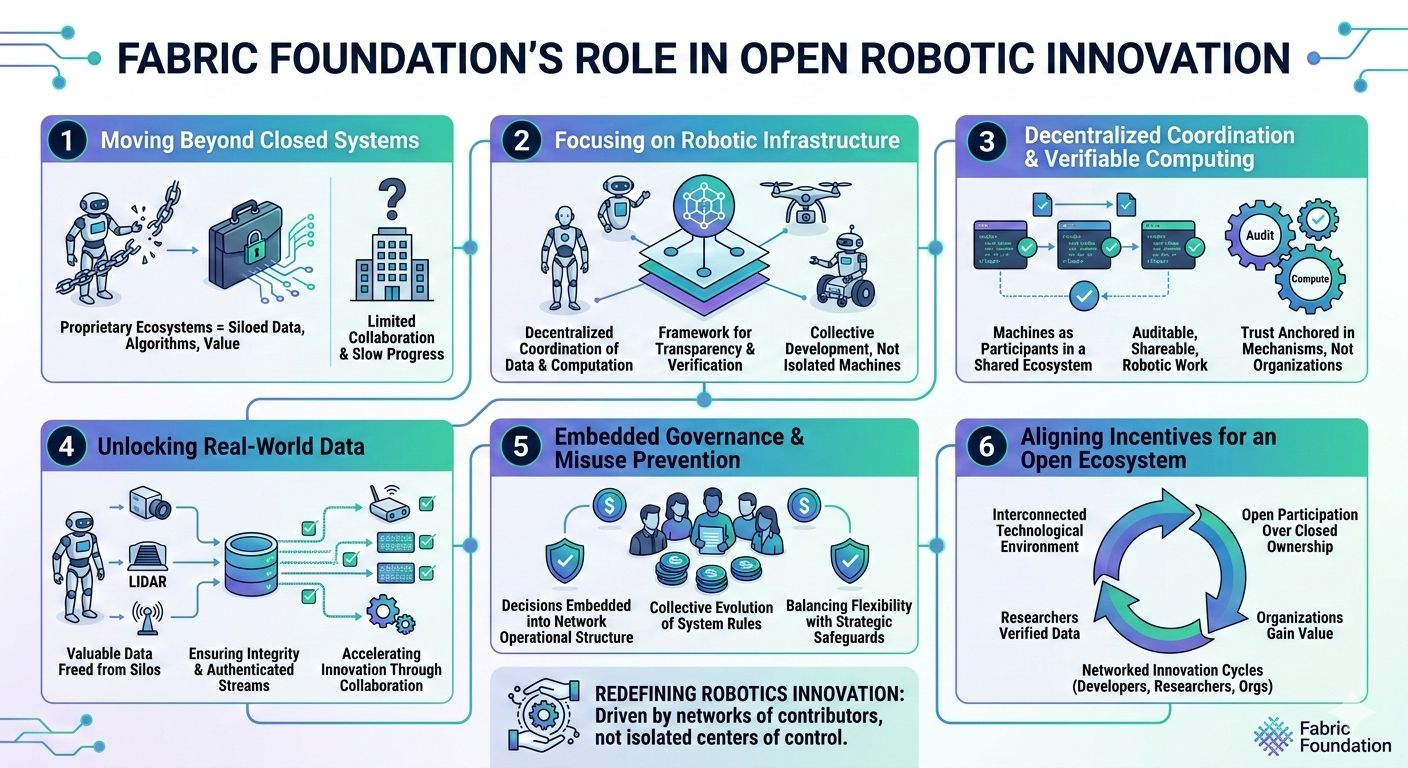
La conversazione attorno all'innovazione robotica aperta diventa quindi molto più significativa quando l'attenzione si sposta dai singoli robot ai sistemi che consentono a quei robot di coordinare il lavoro, condividere dati verificabili e evolversi attraverso la collaborazione piuttosto che l'isolamento. È qui che l'approccio infrastrutturale introdotto dalla Fabric Foundation inizia a cambiare il panorama, non costruendo un singolo tipo di robot o promuovendo un design hardware specifico, ma creando un quadro di rete in cui i sistemi robotici possono operare come partecipanti in un ecosistema tecnologico condiviso che valorizza la trasparenza, la verifica e lo sviluppo collettivo.
Nelle architetture robotiche tradizionali, ogni macchina funziona in gran parte come un'unità autonoma controllata dall'organizzazione che la possiede, e sebbene questi sistemi possano scambiare informazioni tramite API o servizi cloud, la struttura fondamentale rimane centralizzata, il che significa che la fiducia nel sistema dipende in ultima analisi dalla fiducia nell'organizzazione che gestisce l'infrastruttura. Questo assetto funziona per molti casi d'uso industriali, ma diventa limitante quando la robotica inizia a espandersi in applicazioni sociali più ampie dove le macchine interagiscono con stakeholder diversi, contribuiscono con dati a ambienti condivisi e partecipano a flussi di lavoro collaborativi che si estendono oltre i confini operativi di una singola azienda.
Il modello infrastrutturale sviluppato da Fabric introduce un modo diverso di pensare al coordinamento robotico, in cui le macchine non sono semplicemente dispositivi che eseguono istruzioni isolate, ma partecipanti a una rete distribuita in cui le loro azioni, calcoli e output di dati possono essere verificati attraverso meccanismi trasparenti piuttosto che semplicemente fidati perché originano da un'organizzazione specifica. Combinando il coordinamento decentralizzato con i principi del calcolo verificabile, il protocollo consente una struttura in cui il lavoro robotico diventa auditabile, condivisibile e interoperabile tra diversi operatori, sviluppatori e gruppi di ricerca.
Una volta che la robotica inizia a operare all'interno di quel tipo di ambiente, le implicazioni si estendono ben oltre il design tecnico delle singole macchine, perché l'innovazione aperta non riguarda solo chi può costruire robot, ma anche chi può accedere alle conoscenze generate dall'attività robotica e come quella conoscenza contribuisce all'evoluzione dell'ecosistema. I dati raccolti dalle macchine che svolgono compiti nel mondo reale rappresentano una delle risorse più preziose nello sviluppo della robotica, eppure nei modelli tradizionali questi dati rimangono spesso isolati, impedendo a ricercatori e sviluppatori di costruirci sopra in modi che potrebbero accelerare i progressi in tutto il campo.
L'introduzione della coordinazione dei dati verificabili attraverso uno strato infrastrutturale cambia quella dinamica consentendo ai sistemi robotici di contribuire con informazioni a reti condivise mantenendo meccanismi per l'autenticazione e la responsabilità, assicurando che i partecipanti possano fare affidamento sull'integrità delle informazioni senza dover fidarsi dell'entità che le ha generate originariamente. In questo ambiente, l'innovazione diventa meno dipendente da scoperte isolate e più dipendente da una collaborazione cumulativa, in cui i miglioramenti apportati da un partecipante possono informare il lavoro di altri all'interno della rete.
Tuttavia, creare un quadro per l'innovazione robotica aperta introduce anche nuove domande su governance e responsabilità, perché una volta che le macchine iniziano a contribuire con dati ed eseguire compiti all'interno di un'infrastruttura condivisa, diventa necessario determinare come vengono prese le decisioni riguardo le regole del sistema, i permessi di accesso e gli standard operativi. Il livello di governance diventa quindi importante quanto l'infrastruttura computazionale stessa, poiché il successo a lungo termine di un ecosistema aperto dipende dall'equilibrio tra flessibilità per gli sviluppatori e salvaguardie che prevengano abusi o instabilità all'interno della rete.
Questa è un'altra dimensione in cui l'architettura supportata da Fabric diventa strategicamente significativa, perché il protocollo non tratta la governance come un pensiero secondario, ma piuttosto la integra direttamente nell'infrastruttura che coordina l'attività delle macchine. Incorporando quadri decisionali nella struttura operativa della rete, l'ecosistema può evolversi collettivamente piuttosto che fare affidamento su un'unica autorità per dettare la direzione dello sviluppo.
Da una prospettiva più ampia, l'aspetto più interessante di questo approccio non è semplicemente che i robot possono condividere dati o coordinare compiti attraverso una rete decentralizzata, ma che gli incentivi economici e tecnologici all'interno del sistema iniziano ad allinearsi con la partecipazione aperta piuttosto che con la proprietà chiusa. Gli sviluppatori guadagnano la capacità di costruire applicazioni che interagiscono con una rete di macchine piuttosto che con la piattaforma di un singolo fornitore, i ricercatori guadagnano accesso a dati verificabili che supportano esperimenti e scoperte, e le organizzazioni che distribuiscono robot guadagnano un quadro in cui i loro contributi possono generare valore oltre il compito immediato che quelle macchine svolgono.
Questo cambiamento negli incentivi trasforma gradualmente la robotica da una collezione di sistemi isolati in un ambiente tecnologico interconnesso in cui macchine, sviluppatori e organizzazioni contribuiscono tutti a un ciclo di innovazione condiviso. Invece che ogni nuova generazione di robot emerga da laboratori aziendali separati, i miglioramenti possono propagarsi attraverso l'ecosistema in modi che accelerano i progressi mantenendo trasparenza su come vengono implementati tali miglioramenti.
Naturalmente, l'efficacia di questa visione dipende in ultima analisi da quanto bene l'infrastruttura funzioni quando l'ecosistema cresce in scala e complessità, perché i sistemi aperti devono essere resilienti non solo in periodi di rapido sviluppo, ma anche durante momenti in cui interessi concorrenti, sfide tecniche o comportamenti imprevisti mettono alla prova la stabilità della rete. I quadri di coordinamento che appaiono eleganti in teoria devono dimostrare di poter mantenere affidabilità, responsabilità e sicurezza anche quando la partecipazione si espande e il volume dei dati generati dalle macchine aumenta in modo drammatico.
Ecco perché il ruolo dei fornitori di infrastruttura nell'innovazione robotica aperta è molto più significativo di quanto possa apparire inizialmente, poiché sono responsabili di garantire che i meccanismi che abilitano la collaborazione non introducano vulnerabilità che minano la fiducia nel sistema. Se la verifica fallisce, la governance diventa inefficace, o il coordinamento si rompe sotto pressione, la promessa della robotica aperta potrebbe facilmente tornare al modello familiare delle piattaforme proprietarie isolate.
Visto da questa prospettiva, la vera importanza dell'approccio di Fabric risiede non nel promuovere una categoria specifica di robot o applicazioni, ma nell'instaurare le condizioni strutturali che consentono alla robotica di evolversi come un vero dominio tecnologico collaborativo piuttosto che come una collezione frammentata di sistemi indipendenti. Creando un'infrastruttura che collega macchine, sviluppatori e organizzazioni attraverso il calcolo verificabile e il coordinamento decentralizzato, la fondazione sta cercando di ridefinire come si verifica l'innovazione all'interno di uno dei campi tecnologici più trasformativi dell'era moderna.
Il significato a lungo termine di questo sforzo sarà misurato non dal numero di robot connessi alla rete nel breve termine, ma da se l'ecosistema riesce a dimostrare che un'infrastruttura aperta può supportare una collaborazione affidabile, sicura e scalabile tra macchine che operano nel mondo reale. Se questo risultato viene raggiunto, allora il significato dell'innovazione robotica aperta cambierà da un ideale astratto a una realtà pratica in cui l'evoluzione della robotica è guidata da reti di contributori piuttosto che da centri di controllo isolati.
@Fabric Foundation #ROBO $ROBO


