I’ve seen enough “blockchain for robots” ideas to instinctively roll my eyes.
Usually it’s vague. Something about machine economies, maybe a warehouse robot paying another robot in tokens. It sounds futuristic, but when you press for architecture, it falls apart.
That’s why I didn’t take Fabric Protocol seriously at first.
Then I read it again — slower.
Fabric isn’t pitching robots as token holders. It’s building coordination infrastructure for general-purpose robotics. That’s a very different thing.
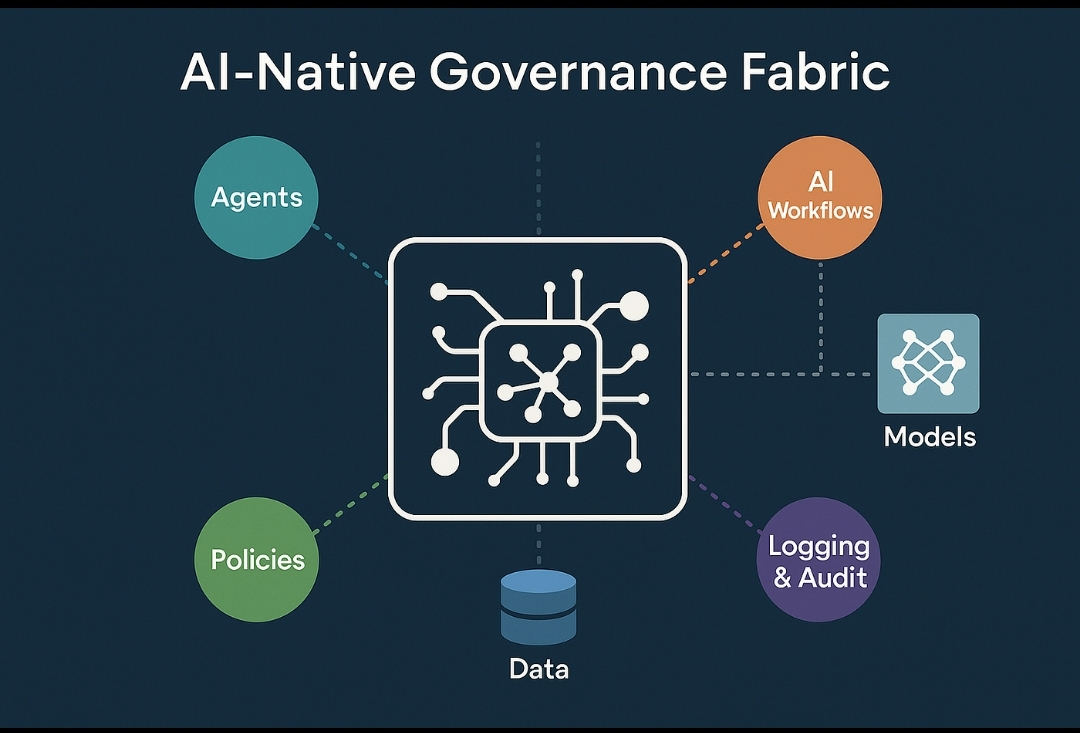
The core idea isn’t flashy: create an open network where robot construction, governance, updates, and regulation are coordinated through verifiable computing and a public ledger.
When I translated that into plain terms for myself, it became more interesting.
If robots are going to move beyond isolated factory machines into shared public environments — logistics hubs, cities, healthcare, homes — then coordination becomes a governance problem, not just a hardware problem.
Who decides how a robot updates its behavior? Who verifies that its software hasn’t been tampered with? Who sets the rules when autonomous systems interact with humans? Who logs what happened when something goes wrong?
Right now, most of that lives inside corporations.
Fabric’s model pushs those decisions into a protocol layer supported by the Fabric Foundation — a non-profit structures designed to steward the networks rather than extract from it.
That’s subtle, but important.
Because once robots become general-purpose agent's you’re no longer just managing code. You’re managing behavior in shared environments.
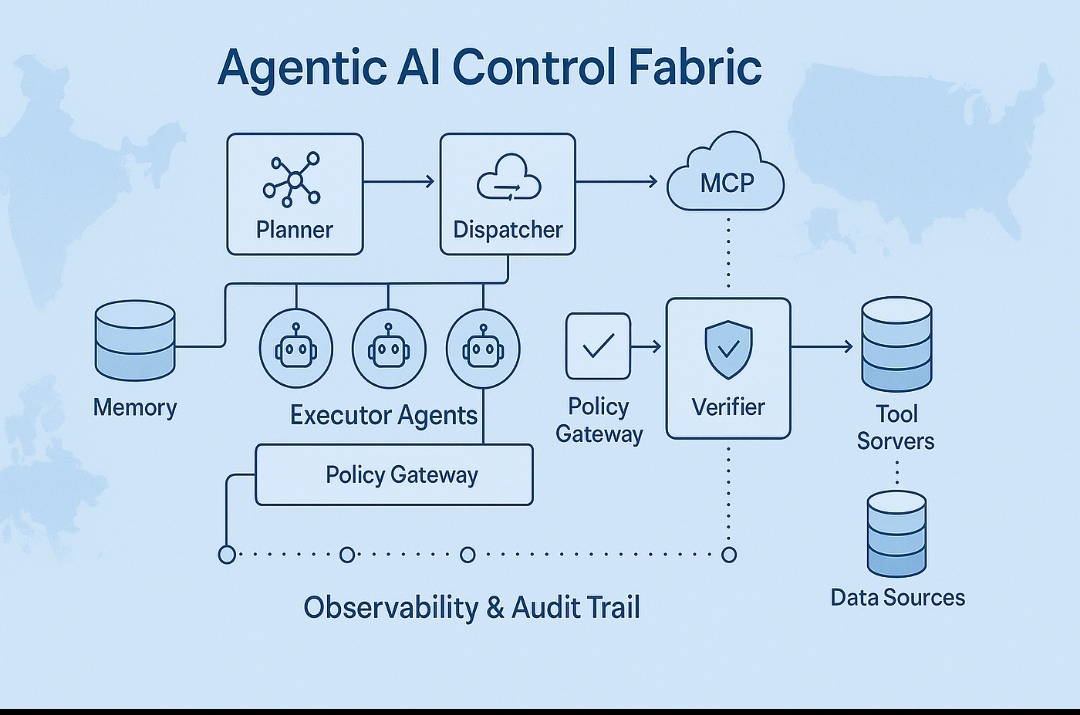
Fabric coordinates three things in one stack: data, computation, and regulation.
That triad is what caught my attention.
Data: what the robot sees and records. Computation: how it interprets and acts on that data. Regulation: the constraints and governance around that behavior.
Most robotics platforms focus heavily on the first two. Fabric explicitly integrates the third.
And it does so using verifiable computing.
That phrase is easy to gloss over but it matters. Verifiable computing means you can prove that certain computations were executed as claimed. In robotics, that’s huge. It creates auditability. It creates traceability. It makes actions inspectable rather than opaque.
Pair that with a public ledger, and you get something closer to shared accountability infrastructure.
Instead of trusting a single manufacturer’s black-box updates, you get modular infrastructure where upgrades, policies, and agent behavior can be coordinated openly.
This is where the “agent-native infrastructure” concept clicked for me.
Fabric isn’t treating robots as peripherals attached to a network. It’s treating them as first-class participants. Agents with computational identity, governance hooks, and upgrade paths.
That framing feels aligned with where AI and robotics are heading.
We’re moving toward systems that aren’t just mechanical tools — they’re semi-autonomous actors. If that’s true, then the infrastructure coordinating them needs to be as transparent and evolvable as the software itself.
Of course, there are serious challenges.
Robotics isn’t crypto-native. Hardware cycles are slower. Regulation varies by jurisdiction. Real-world safety is unforgiving. You don’t get to “patch later” when physical systems are involved.
But that’s why Fabric’s modular approach makes sense. You can evolve components independently. Update governance rules without rewriting hardware. Adjust compliance frameworks while preserving core coordination layers.
$ROBO, as the protocol’s token, sits inside that ecosystem — aligning incentives around participation, governance, and network evolution. Not as a speculative gimmick, but as an economic coordination tool for contributors and validators within the Fabric network.
What surprised me most is that Fabric doesn’t feel like it’s chasing hype. It feels infrastructural.
Less “robots trading tokens.”
More “how do we build a shared operating layer for machines that coexist with humans?”
That’s a harder problem.
And a more serious one.
I’m not naïve about the timeline. General-purpose robotics at scale is still uneven. But the governance and verification layers can’t be an afterthought. They need to exist before autonomy scales, not after incidents force them into existence.
Fabric is betting on that timing.
Not that robots need blockchains to move.
But that human-machine collaboration at scale needs transparent coordination.
That’s not a meme narrative.
It’s a systems design thesis.
And for the first time, robotics + protocol infrastructure didn’t sound like science fiction — it sounded like preparation.