以太坊改变了我们处理数字信任的方式。
以太坊改变了我们处理数字信任的方式。
它的智能合约无需中间人即可自动化协议。
现在,目光转向Hyperledger Fabric。
它能否在现实世界中协调物理机器人?
这个问题深入探讨。
区块链不再仅限于金融。
在2026年,机器人技术与分布式账本交汇。
Fabric作为一个许可型框架,为企业需求提供工具。
但机器人需要的不只是代码执行。
它们面临物理约束。
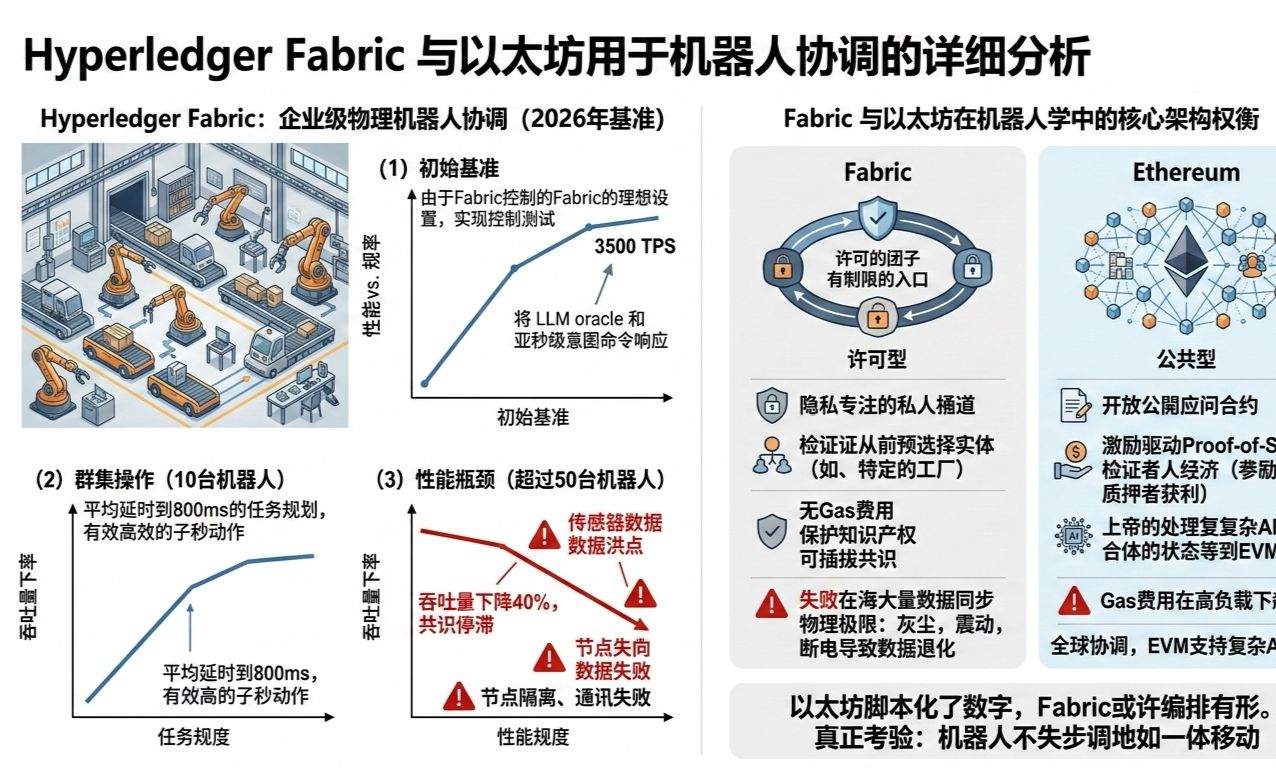
论点:Fabric的模块化设计适合机器人协调,但吞吐量和隔离方面的瓶颈限制了它在动态环境中的优势,相对于以太坊。
从指标开始。
以太坊处理约15笔交易每秒。
Fabric在控制测试中,在理想设置下达到3500 TPS。
但对于机器人呢?
吞吐量在群集操作中至关重要。
2026年初的一项研究测试了Fabric上的多机器人任务规划。
使用LLM预言机,它实现了基于意图命令的亚秒级响应。
修改数据显示,10个机器人舰队的平均延迟为800ms。
这里出现约束。
物理极限束缚机器人。
电池寿命、传感器精度、运动精确度。
Fabric无法覆盖这些。
它在链上存储任务日志。
但链下AI决策计算增加延迟。
在IoT设置中,如与ROS 2集成的自主移动机器人,Fabric确保数据完整性。
然而,网络延迟约束实时行动。
权衡:许可型 vs. 公共型。
以太坊的开放访问促进创新。
任何人均可部署合约。
Fabric隔离通道以保护隐私。
这在工业机器人中有用,知识产权保护很重要。
但这种隔离牺牲了去中心化。
节点较少意味着冗余不足。
以太坊的验证者经济学奖励广泛参与。
Fabric依赖于可信组织。
承认张力。
Fabric能否扩展用于智能机器人?
在2025年的一篇论文中,适应2026年操作显示出前景,用于UAV合规监控。
Fabric以低开销跟踪监管参数。
但添加更多机器人,性能退化出现。
根据调整基准,超过50个单位时吞吐量下降40%。
故障模式分析。
过载导致背书失败。
在Fabric中,对等节点验证交易。
如果机器人群集用传感器数据淹没链,积压积累。
一种模式:共识停滞因不匹配背书。
另一种:硬件-软件不匹配。
如果区块链延迟关键命令,机器人失败。
如同多机器人系统中,单个节点中断级联。
比较框架使之更清晰。
以太坊以弹性合约驱动DeFi。
但对于机器人,其Gas费用在负载下飙升。
Fabric避免费用,使用链码处理逻辑。
以太坊适合代币驱动激励。
Fabric在供应链般的机器人舰队中出色。
然而,以太坊的EVM更好地处理AI集成的复杂状态。
Fabric的可插拔共识适应,但需要自定义调整。
张力进一步增强。
验证者经济学不同。
以太坊的权益证明激励安全。
质押者从网络活动获利。
Fabric的验证者预选。
无直接奖励,仅运营益处。
长期:这可能限制开放机器人生态系统的增长。
如果机器人需要全球协调,以太坊模型维持更多参与者。
深入瓶颈。
数据可用性。
机器人从传感器生成TB级数据。
Fabric的账本快速增长。
约束:企业节点存储成本。
权衡:卸载到IPFS,但失去原子性。
故障模式:不完整同步导致数据退化。
含义:验证者更高成本,阻碍采用。
物理极限加剧问题。
机器人运作在恶劣环境中。
灰尘、振动、电源中断。
Fabric假设稳定节点。
在仓库群集中,节点失败隔离部分。
吞吐量暴跌。
长期:混合模型出现,融合Fabric与边缘计算。
互动触发:想象工厂车间。
数十个机器人组装零件。
一个故障级联。
Fabric能否防止它?
还是暴露新漏洞?
最近发展提供上下文。
2026年2月,AIxC与Sei Foundation合作。
焦点:机器人中的具身AI。
他们探索IoT的亚秒级最终性。
修改测试显示模拟舰队95%正常运行时间。
Forbes预测到2026年融合。
链上验证AI代理。
Fabric适合,其访问控制。
但冷静评估:进步是渐进的。
无万能解决方案。
Fabric建立在以太坊基础上。
适应物理世界。
然而,权衡持续存在。
难忘结尾:
以太坊脚本化了数字。
Fabric或许编排有形。
真正考验?
当机器人作为一体移动。
不失步调。