One of the biggest shifts Web3 introduced was the idea of shared state across independent participants. Blockchains allowed systems that don’t trust each other to still agree on what is true. Finance was the first domain to adopt this. Fabric Foundation applies the same principle to robotics.
Today, most robots still operate inside platform silos. Their identity, permissions, and behavior rules live inside proprietary controllers or cloud systems. That works while machines stay within one ecosystem. But modern robotics environments are increasingly cross-platform factories, logistics networks, and automation systems combine robots from different vendors and software stacks.
In these environments, coordination becomes a state problem.
Each robot needs confidence about what other machines are allowed to do and how they can interact. Without a shared reference, coordination depends on integration or implicit trust between platforms. Fabric introduces a Web3-like model where machine identity, permissions, and operational roles are anchored in a shared, verifiable ledger. Independent robots can reference the same state without sharing control systems.
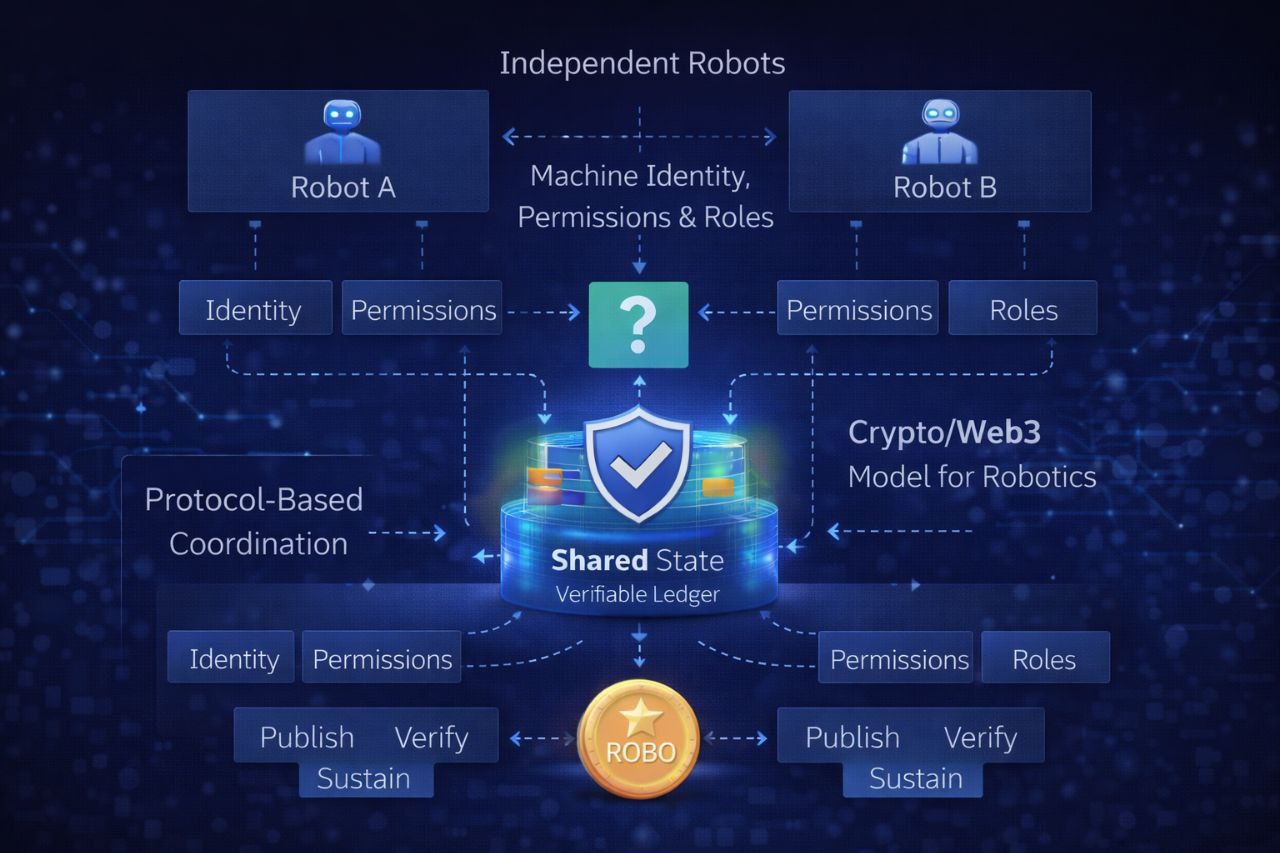
This effectively turns robotics into a networked environment similar to crypto networks. Machines become participants that coordinate through protocol rather than ownership. Agreement shifts from platform authority to shared logic.
ROBO supports this ecosystem as the participation and coordination asset. Maintaining shared machine state requires actors that publish, verify, and sustain it. ROBO aligns incentives around reliable identities, permissions, and predictable robot behavior across platforms.
So bringing a Web3 principle into robotics isn’t about adding tokens to machines.
It’s about giving autonomous systems the same foundation blockchains gave distributed networks shared truth across independent actors.
Fabric Foundation defines that shared truth.
ROBO sustains the network that keeps it trustworthy.
@Fabric Foundation #ROBO $ROBO
