Actuator paused.
Status: pending_attestation.
The motion instruction had already passed local validation. The command pipeline was clean. Under isolated control it would have extended without ceremony. In Fabric, “clean” just means the problem hasn’t reached the ledger yet.
The pause comes from the registry side, not the joint. In Fabric, motion can be correct and still be non-extendable.
The Deterministic robotic state extension halts at the boundary where motion becomes Proof-bound task completion. No fault line. No obstruction. Just the gate closing because the next state needs proof to exist first.
I open the trace and land in the wrong filter. seal_history, settled-only, a previous task hardened under On-ledger action verification, archived like it’s finished and unarguable.
Not this one.
Back.
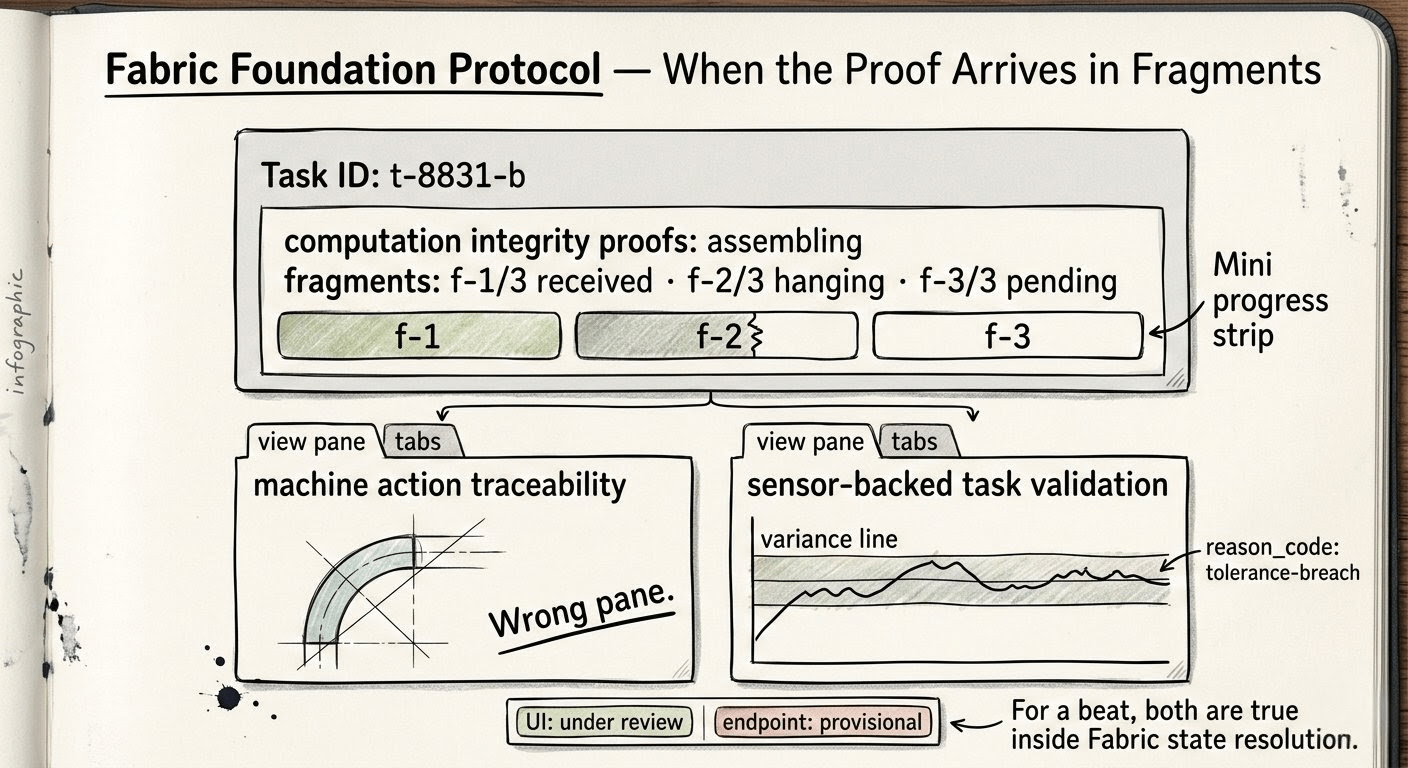
The coordination lane tag is already attached. Compliance-scoped. That’s enough to trigger Verifiable robotic computation before the state machine advances. The physical segment already happened; Fabric hasn’t decided if it counts.
Fragment panel:
f-1/3 received
f-2/3 received
f-3/3 waiting_for_quorum
The controller holds under Execution under physical constraints while the proof pipeline assembles upstream. In Fabric, “holding” is not the same as “cleared.”
The proof registry shows the bottleneck instead of the error:
attestation_queue_depth: 5 → 6
Two confirmations arrive in a clump, then silence. I refresh too early and stare at the same number like it’s going to confess.
Past this point, the Verifiable autonomy layer doesn’t allow continuation without a hardened Proof of Robotic Work (PoRW) seal. Not later. Not post-hoc. The seal is the permission.
I hover over override.
Override clears the motion.
Override also routes the task into Consensus-secured task arbitration and flips it challengeable before settlement. The arbitration lane is already open in the background, inactive but ready, the way Fabric keeps dispute surfaces warm even when nothing looks broken.
I don’t click.
I pull the enclave lane instead. Hardware-attested computation signature present. Sensor digest aligned. Robot task attestation packet assembled clean and already fanned out to Distributed validation nodes.
Nothing looks wrong.
The network just isn’t done agreeing.
The final fragment appears.
And reorders.
Digest mismatch flashes for half a cycle. My first reaction is proof drift. Then I catch the header, I’m still reading a stale snapshot. proof_registry_snapshot_lag: 2 blocks. I compared against the wrong digest again.
Wrong pane.
Refresh.
The Physical-to-digital proof binding completes locally, but the shared state flips in public:
assembling → challengeable → assembling
wrong order.
A governance hook attaches mid-process. The coordination lane now requires Machine behavior certification for this class of motion under current conditions. Not because the actuator failed. Because the rule boundary moved while the system was paused, the way Fabric turns governance into a live constraint, not a report you read afterward.
The proof window reopens.
Under Trust-minimized machine execution, “it looks stable” isn’t a signal. It has to harden as Consensus-backed robotic activity across stake-weighted participants.
The verification line stalls for two cycles. Then moves.
f-3/3: waiting_for_quorum → verifying → verified
The Cryptographic execution proofs stop reordering and finally hold their sequence. That’s when the UI stops feeling like a suggestion.
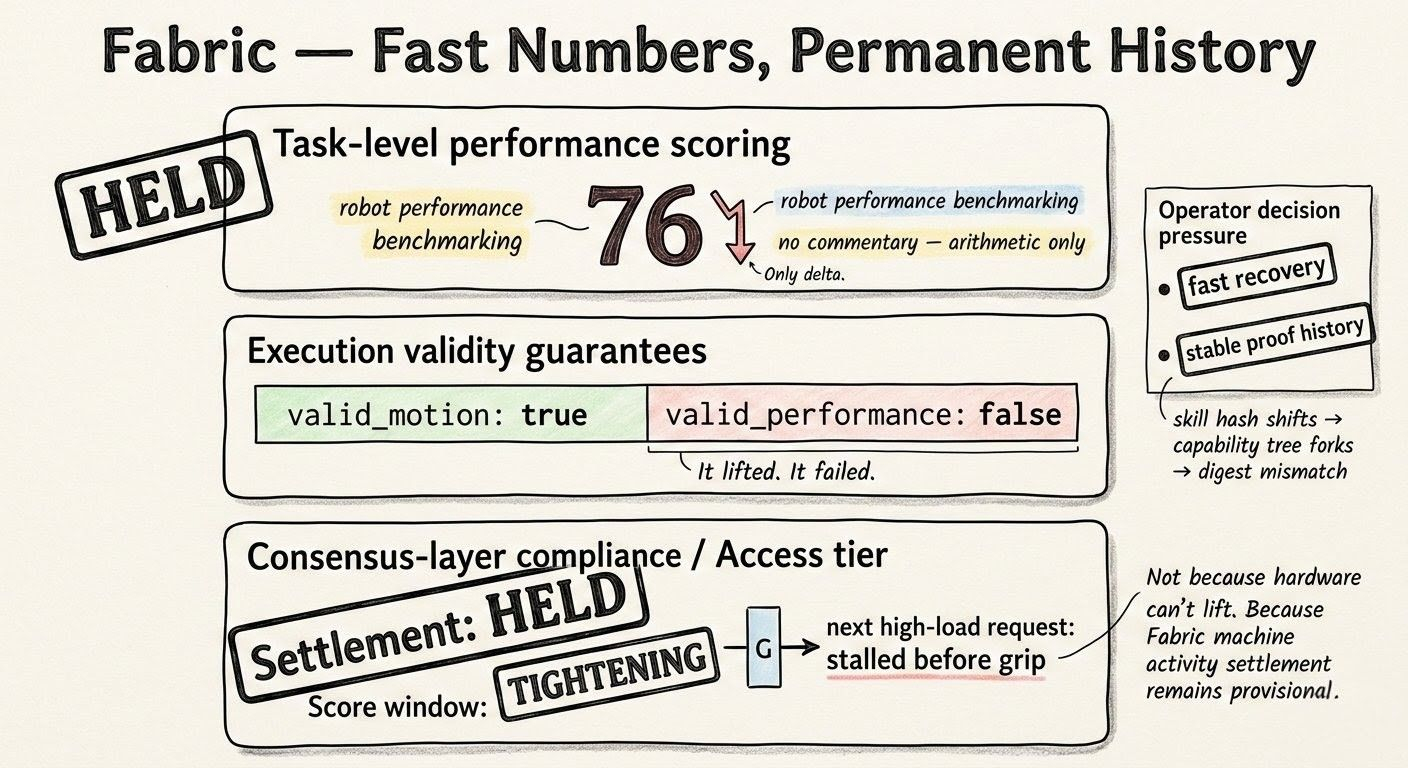
The queue reshuffles again. Agent-aligned compute scheduling bumps this task’s verification weight ahead of lower-impact work. No banner. No drama. Just a different order, Fabric choosing what becomes real first.
The actuator remains paused while the ledger finishes deciding.
I drift back to override one more time, just to feel the temptation. Clearing the lane is easy. Clearing the record after arbitration isn’t.
I leave it.
The verification confidence crosses threshold.
The Deterministic robotic state extension unlocks.
The actuator resumes.
The move completes without drama, as if the pause never existed. The seal hardens under Proof of Robotic Work (PoRW) and the entry lands into the Immutable robotic execution record, mirrored into Cryptographically sealed robot logs, another line written into Fabric without asking whether I prefer speed or certainty.
Settlement still doesn’t flip.
Public registry view:
pending_review.
Arbitration lane: available. Inactive.
Queue depth: 6.
The next instruction is already indexed.
The attestation window remains open.
Cursor still resting on “escalate.”