
Robots will execute tasks.
Robots will generate revenue.
Robots will scale across industries.
But who governs the infrastructure they operate on?
Coordination is not the same as distribution.
And when coordination concentrates early, governance becomes decorative.
That is the structural risk facing every emerging machine economy.
Infrastructure begins centralized. That is normal. Early capital, early validators, early insiders. But when voting power hardens around initial stakeholders, decision-making no longer reflects participation — it reflects allocation.
In a robot economy, that distortion becomes dangerous.
Because robots are not passive users. They are productive agents. They execute labor, generate verifiable output, and interact with markets through programmable logic. If the governance layer remains tightly concentrated, parameter changes, fee structures, emission schedules, and upgrade paths can be shaped by holders whose incentives may not align with network-wide robotic participation.
Consider a simple scenario:
A small group controlling a majority of governance power votes to increase settlement fees. Robot operators absorb higher costs. Smaller participants exit. Throughput drops. The network becomes less competitive — not because robots failed, but because governance optimized for yield, not adoption.
Or another scenario:
Emission schedules are modified to favor early stakers over active robotic contributors. Capital concentration deepens. Productive participation weakens. The economy shifts from task execution to token extraction.

Coordination without distribution becomes control.
This is where Fabric Foundation introduces a structural distinction.
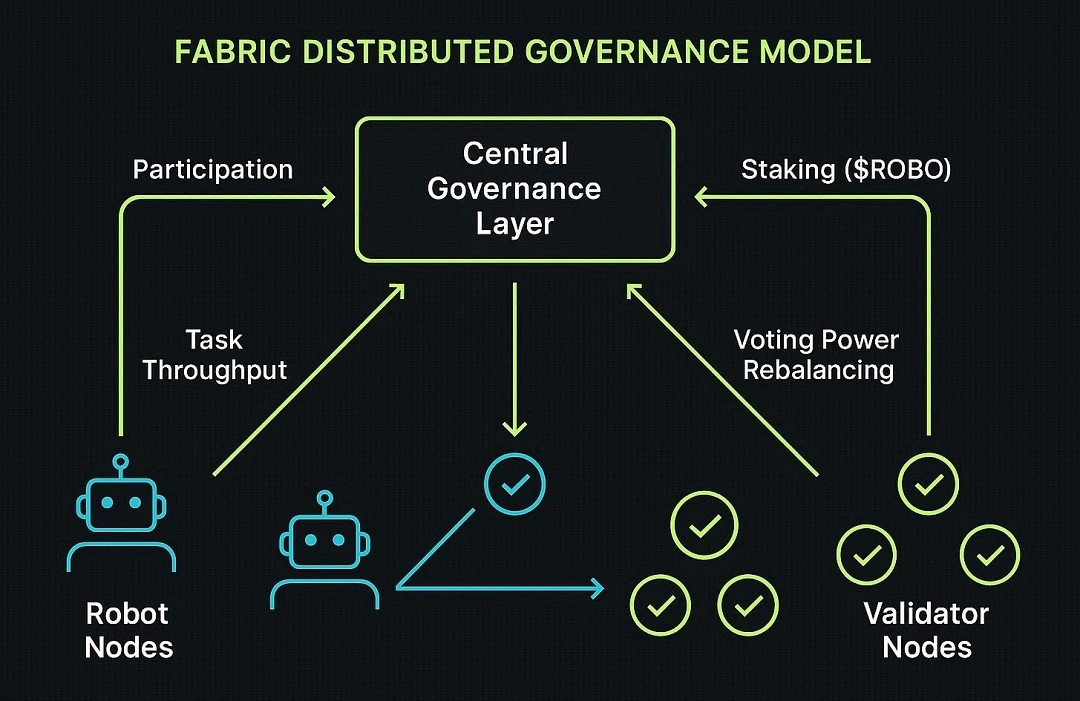
Fabric’s governance architecture is not framed around symbolic decentralization. It is built around participation alignment. The objective is not simply to allow voting — it is to prevent static concentration from defining long-term machine infrastructure.
$ROBO is not ornamental in this system. It functions as the coordination and distribution instrument. Emissions, staking dynamics, and governance participation are structured to expand influence beyond early allocation and reward active network contribution.
That design matters.
Because in a robotic economy, infrastructure is not neutral. If robots execute autonomous economic activity — settling tasks, recording identity, generating revenue — then governance must evolve beyond capital-weighted permanence.
Otherwise, the system risks becoming vertically controlled under the surface of decentralization.
Fabric’s thesis is direct: if machines become economic agents, governance cannot remain a closed loop between early stakeholders. Distribution mechanisms must continuously rebalance influence as network participation grows.
That is the difference between a coordinated network and a captured one.
The robot economy will not fail because machines cannot execute tasks. It will fail if the infrastructure governing them becomes structurally rigid.
Fabric Foundation positions governance not as a checkbox, but as a living coordination layer connected to distribution logic through $ROBO.
If robots are to function as programmable economic agents, the protocol beneath them must reflect dynamic participation — not static ownership.
The next phase of automation will not be defined by hardware capability.
It will be defined by who controls the rails.
@Fabric Foundation $ROBO #ROBO #robo
