For most people, the idea of a robot still feels like something futuristic. We imagine machines walking through warehouses, assisting in hospitals, delivering packages, or helping inside homes. And to be fair, many of those things are already happening. Robotics has made enormous progress in perception, movement, and machine intelligence. Sensors are better, models are faster, and machines can now interpret environments in ways that were impossible a decade ago.
But beneath all of that visible progress sits a quieter problem that rarely gets discussed.
Robots are getting smarter, yet the systems that coordinate them are still surprisingly primitive.
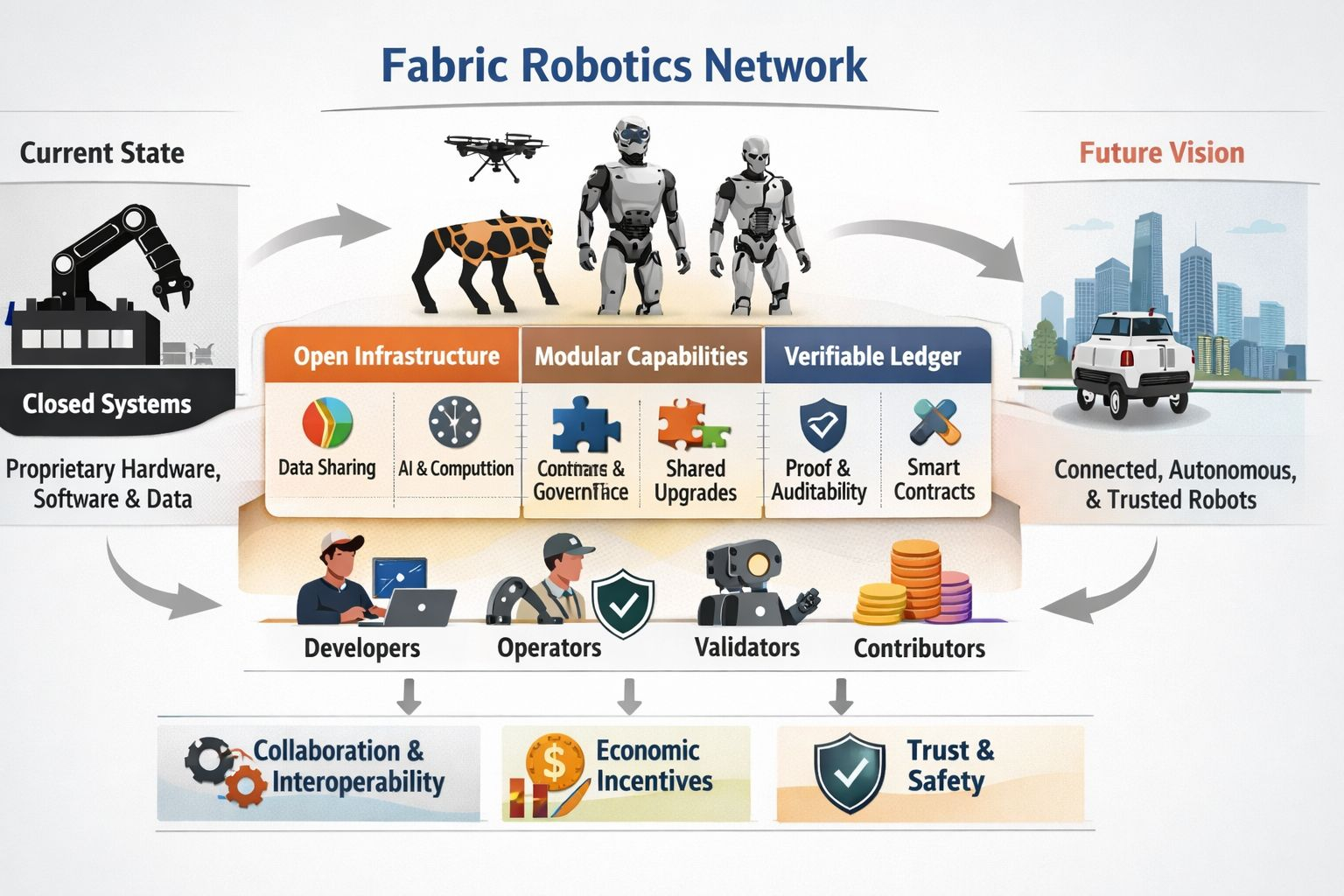
Most robots today live inside closed environments. A company builds the hardware, writes the software, manages the data, controls the updates, and ultimately decides how the machine behaves. This approach works when robots are performing very specific tasks inside controlled facilities. But it becomes much harder when machines start interacting with broader environments, multiple organizations, or even other robots built by different companies.
At that point, robotics stops being just a hardware challenge. It becomes an infrastructure challenge.
A robot does not only need to move correctly. It needs to prove what it did, share useful information with other systems, follow rules, and operate within a structure where responsibility and value can be clearly defined. Without those layers, robots remain powerful tools, but they struggle to become reliable participants in larger systems.
This is the deeper problem that Fabric Foundation is trying to address.
Rather than focusing only on improving robot intelligence or mechanical design, Fabric approaches robotics from a different angle. The project treats robotics as a network problem. The core idea is that robots should not exist as isolated machines controlled entirely by single companies. Instead, they should operate within an open framework where data, computation, permissions, and contributions can be coordinated through shared infrastructure.
In other words, Fabric is not only interested in building better robots. It is interested in building the environment that allows robots to evolve, collaborate, and be governed more transparently.
To understand why this matters, it helps to look at how robotics development currently works. When a robot improves today, the improvement usually happens inside a closed loop. Engineers refine the model, push a software update, or release a new hardware version. Progress happens, but it is mostly centralized. The knowledge stays inside the company that built the machine.
Fabric imagines a different structure.
Instead of treating robotic progress as something owned entirely by one manufacturer, the system allows multiple participants to contribute. Developers can improve capabilities, operators can generate real-world performance data, validators can help verify system integrity, and researchers can refine algorithms or models that machines rely on. Each improvement becomes part of a broader ecosystem rather than being locked into a single proprietary stack.
This approach becomes even more interesting when combined with verifiable computing.
One of the biggest challenges in robotics is proving that machines behaved correctly. If a robot performs a task in a warehouse or public environment, the system needs a way to confirm that the action followed the correct instructions and produced a legitimate outcome. Fabric introduces the idea that certain parts of robotic behavior, data flows, and contributions can be coordinated through a public ledger.
That does not mean every tiny robotic movement belongs on a blockchain. Instead, the ledger acts as a coordination layer for the most important elements: identity, contribution tracking, permissions, and economic settlement.
In simple terms, it becomes easier to see who contributed what, who verified a process, and how value should be distributed across the network.
This leads to one of Fabric’s more distinctive ideas: modular robotics capabilities.
Instead of thinking about robots as fixed bundles of functionality, Fabric encourages a modular design where capabilities can be added or improved over time. A robot may gain new abilities through software modules, data contributions, or improved algorithms. These upgrades can come from different contributors rather than only the original manufacturer.
The result begins to resemble an ecosystem rather than a product.
Just as smartphones evolved through app ecosystems, Fabric imagines robots evolving through modular capabilities that can be shared, improved, and governed collectively.
Of course, once many participants are involved, incentives become extremely important. If contributors help improve the system, they need a reason to participate. Fabric introduces economic mechanisms that reward useful contributions, secure the network, and discourage dishonest behavior.
Participants who improve system performance, verify tasks, or provide valuable data can be recognized within the network’s incentive structure. At the same time, mechanisms such as bonding and penalties are designed to discourage fraudulent behavior or low-quality work.
The goal is to create a system where robotic progress is not only collaborative but also economically sustainable.
Still, it is important to remain realistic about where the project stands today.
Fabric is early.
Its architecture outlines a thoughtful framework for coordinating robotics development, but many of its ideas still need to prove themselves in real-world environments. Robotics is already one of the most complex engineering fields in existence. Combining robotics with decentralized coordination, economic incentives, and governance mechanisms introduces additional layers of difficulty.
Execution will be the real test.
The project must demonstrate that its infrastructure can support actual robotic workflows rather than simply theoretical designs. That means integrating with real hardware systems, supporting real operators, and proving that its coordination model can handle messy real-world conditions.
There are also adoption challenges. Robotics companies may hesitate to move away from closed systems that give them complete control over their technology. Convincing manufacturers and operators to participate in an open network requires clear advantages in efficiency, security, and economic alignment.
Another challenge lies in measuring contributions accurately. In digital systems, tracking activity is relatively straightforward. In robotics, outcomes depend on many unpredictable variables: environmental conditions, hardware limitations, sensor noise, and human interaction. Designing fair reward systems in such environments is extremely difficult.
And perhaps most importantly, robotics introduces real-world consequences. Unlike purely digital systems, robotic failures can cause physical harm. Any open network coordinating robotic behavior must be designed with safety and accountability as top priorities.
Despite these challenges, Fabric Foundation raises a compelling question about the future of robotics.
As robots become more capable, they will not operate alone. They will interact with other machines, digital services, human operators, and economic systems. In that environment, intelligence alone will not be enough. Coordination, governance, and trust infrastructure will become just as important as mechanical engineering.
Fabric is essentially betting that robotics will eventually require the same kind of open infrastructure that transformed other technological systems in the past.
The internet needed protocols.
Open-source software needed collaborative ecosystems.
Digital finance needed transparent settlement layers.
If robotics follows a similar path, it may eventually need a shared coordination framework that allows machines, developers, and operators to interact within a structured network.
That is the vision Fabric Foundation is exploring.
It is not a finished system yet, and many of its ideas will face difficult tests as the project evolves. But the direction itself reflects a deeper understanding of where robotics may be heading.
The next phase of robotics will not only be about smarter machines.
It will be about building the infrastructure that allows those machines to operate safely, transparently, and collaboratively in the real world.
#ROBO @Fabric Foundation $ROBO