@Fabric Foundation #ROBO $ROBO
The queue didn’t freeze on the lift.
It froze on who got to keep it.
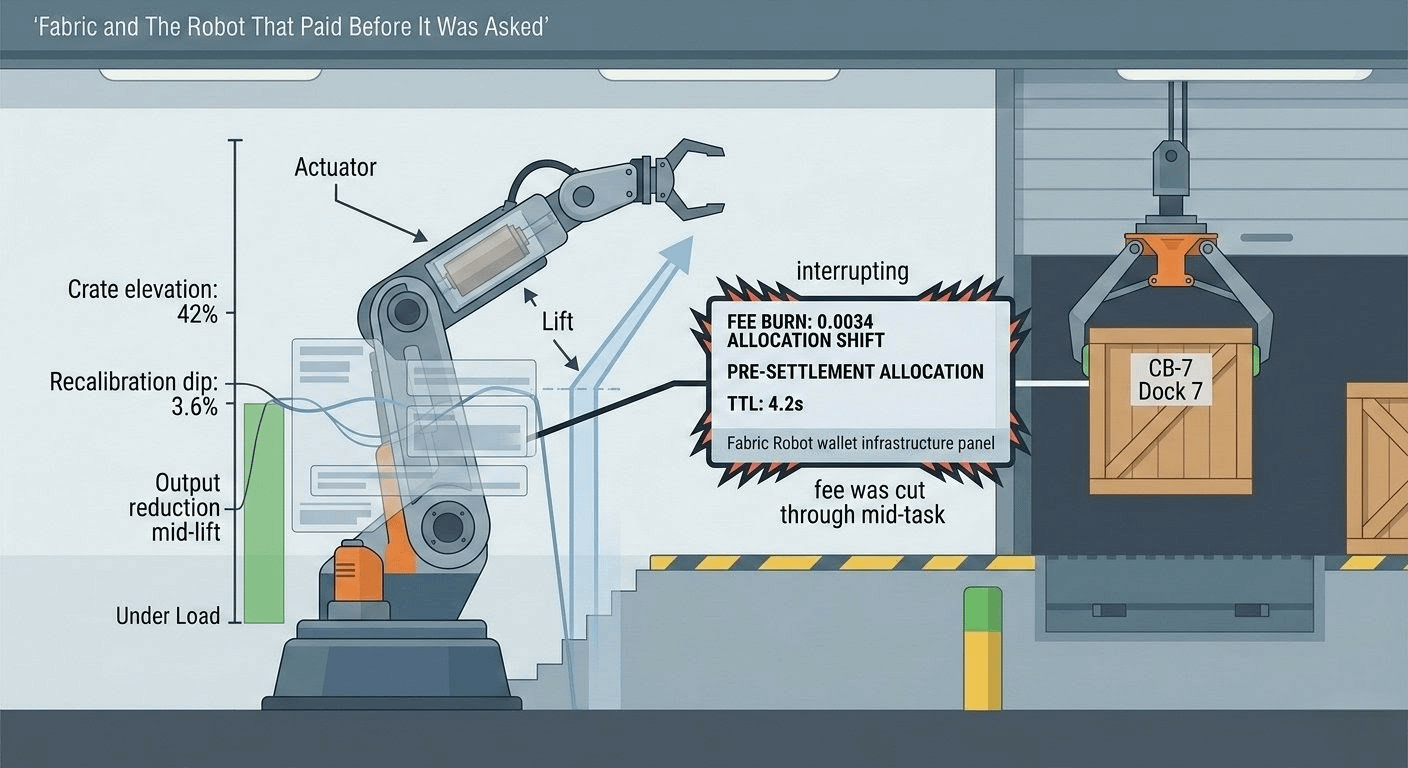
Robot A touched the crate first. Grip closed, torque rose, pallet cleared the rail, and the motion digest went straight into the Fabric public ledger like any other task entering shared coordination memory. Proof of Robotic Work opened behind the telemetry. Clean path. Stable load. Nothing in the actuator trace looked strange enough to earn a second look.
Then the second proof hit.
At first I treated it like replay noise. The public proof registry does that sometimes while the validator cluster indexes a bundle, same digest, same acceleration curve, same path showing up twice before one of them collapses. I nearly closed the pane.
Bad instinct.
The second bundle carried a different machine identity.
Back to the trace. Wider this time. Both entries were already sitting under the same task record in ledger-anchored mission history, like Fabric hadn’t decided whether it was looking at duplicate noise or a real ownership collision.
proof_of_robotic_work: submitted
machine_identity: R-A17
proof_of_robotic_work: submitted
machine_identity: R-B12
coordination_scope: contested
Same crate. Same lift. Different participation claim.
That was enough.
The Fabric coordination kernel didn’t reject either proof. That would have been cleaner. Instead it held both inside the distributed verification registry and shoved ownership sideways into validator arbitration before it let the task harden into reusable mission history.
ownership_state: contested
task_certificate: pending
validator_arbitration: active
robot_claim_priority: unresolved
Robot A had already backed off the rail. Robot B was still carrying the crate through the second half of the arc like it had every right to finish. On the floor camera they looked almost coordinated. I checked Robot A’s pane twice before realizing I had checked the same pane twice.
Wrong machine.
Back again.
I opened the machine identity registry because the conflict had to start somewhere. Hardware signatures didn’t collide. Credential envelopes were valid. Both robots were authorized inside the agent execution ecosystem. Fabric had accepted both dispatch windows. The machines weren’t fake. The problem was worse than that. Both had produced identity-backed robot claims against the same finished work inside the same shared task environment.
The validator layer started reading the envelopes side by side.
task_hash: identical
execution_digest: overlapping
ownership_scope: unresolved
cross_agent_scope: overlapping
By the time those lines appeared, Robot B had already finished the lift. Crate settled. Servo tone dropped. From the machine side the work was complete. Inside the robot-native coordination layer, it still didn’t belong to anyone the network was ready to trust.
That’s when the pressure spread.
queue_depth: 1 : 3
task_certificate: blocked_by_ownership
task_scheduling_with_proof: stalled
I tried staging the next instruction under Robot A. The decentralized task coordination contract accepted the payload for a blink, then pushed the dependency edge back into the same contested scope.
parent_task: unresolved
inheritance_state: denied
machine_to_machine_settlement: pending
Nothing had failed physically. Both robots had already done the work the mission asked for. But the shared infrastructure for robots had stopped assigning downstream participation, and everything behind that task started feeling provisional whether the servos agreed or not.
The arbitration worker pulled the bundles again.
proof_bundle_A: valid
proof_bundle_B: valid
execution_traceable_records: matched
Not helpful.
Two correct proofs were harder to clear than one broken one.
The public proof registry kept both certificates suspended while the cluster rebuilt the sequence. Robot A had initiated the lift. Robot B had closed the grip milliseconds later while the crate was already leaving the rail. Both motion digests qualified as completion. Fabric wasn’t going to let the same task become inherited state for the rest of the line under two different machines.
The crate sat still while validator nodes kept replaying the envelopes.
ownership_state: resolving
task_certificate: provisional
mission_history_branch: duplicated
operator_visible_ownership_trace: split
Behind it the queue kept stacking tasks that technically had somewhere to go but nowhere to inherit from. I hovered over the next command, thumb already shifting toward submit, then backed off when the queue ticked again.
queue_depth: 3 : 5
A few seconds later the arbitration worker cleared one proof. Robot A’s envelope hardened into the consensus-sealed robotic action. Robot B’s certificate stayed in the registry as telemetry and nothing more.
ownership_state: finalized
proof_of_robotic_work: confirmed
distributed_verification_registry: settled
The queue moved again right after that.
Robot B never knew the difference. Its lift had still happened. Its telemetry was still there. The machine had done the work.
Fabric just wouldn’t let it keep the task.