Most infrastructure is invisible until something breaks. You don't think about how electricity gets to your home, or how a packet of data finds its way across the world. It just works, or it doesn't. The interesting question is always: who decided how it was built, and who gets to change it?
That's the kind of question Fabric Protocol is sitting with. Not in a dramatic way. More like an engineer staring at a whiteboard, trying to figure out where the real problem starts.
The protocol is built around robots. Not in the science fiction sense — more in the practical sense of machines that need to do things in the physical world. Pick, move, assemble, assist. That's where things get interesting, because building a robot isn't really one problem. It's several problems stacked on top of each other. You have hardware decisions. Software decisions. Safety decisions. And underneath all of that, governance decisions. Who owns the data the robot generates? Who decides if the robot's behavior is acceptable? Who can update it, and under what conditions?
You can usually tell a system was designed by committee when it answers each of those questions separately, with separate teams, separate standards, no real connective tissue. That's how most industrial robotics works today. It's not broken exactly, but it's fragmented. And fragmentation at that scale tends to produce friction that's hard to see until you're inside it.
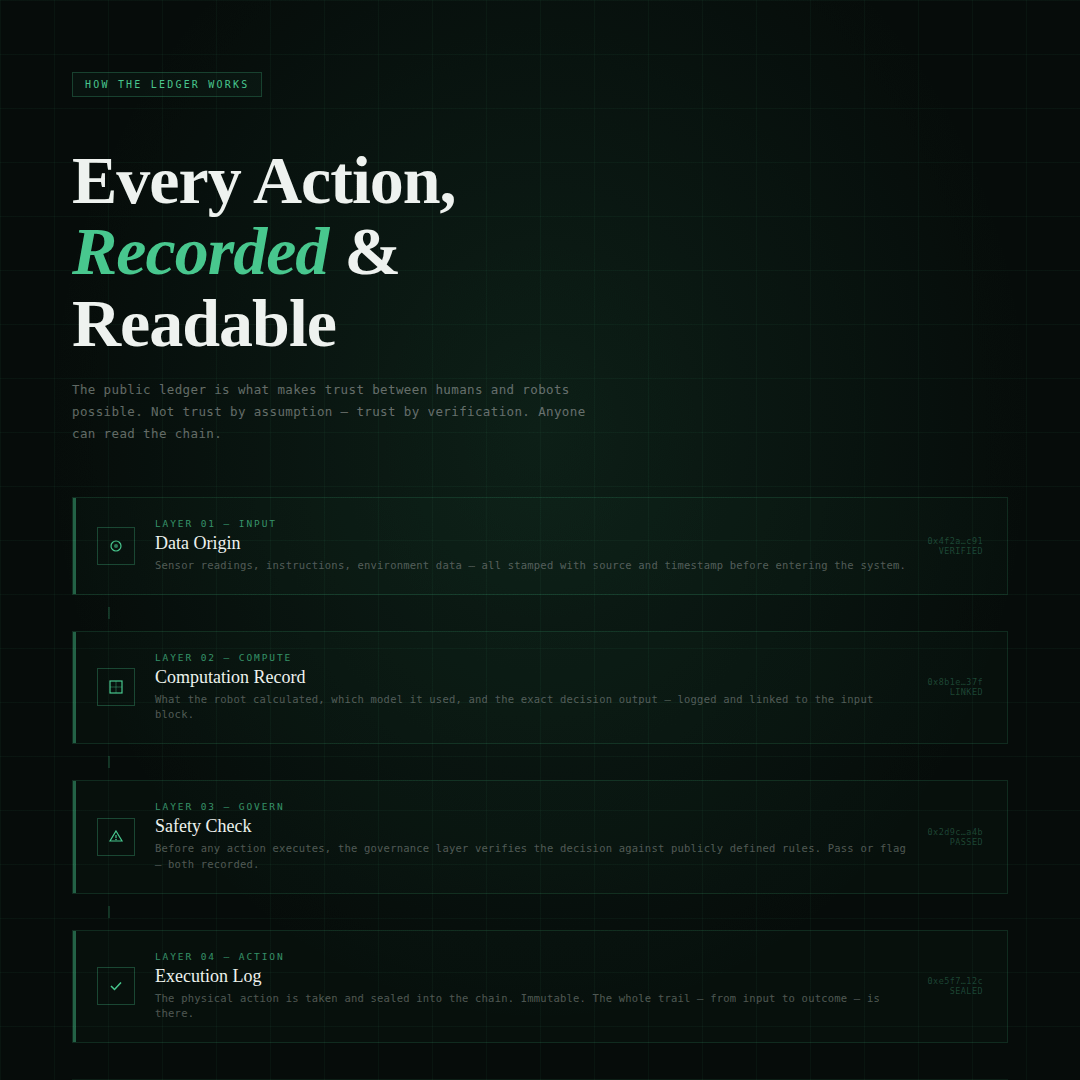
@Fabric Foundation approach is to treat the robot not as a closed product but as something more like a node in a network. The idea is that a robot built on the protocol isn't just a machine — it's a participant. It can receive verified data, contribute to shared systems, operate under governance rules that are legible and auditable. The public ledger piece is what makes that possible. If you want to know what data informed a decision, or whether a regulation was followed, the record is there. It becomes obvious after a while why that matters: trust between humans and machines isn't really about how capable the machine is. It's about whether you can check its work.
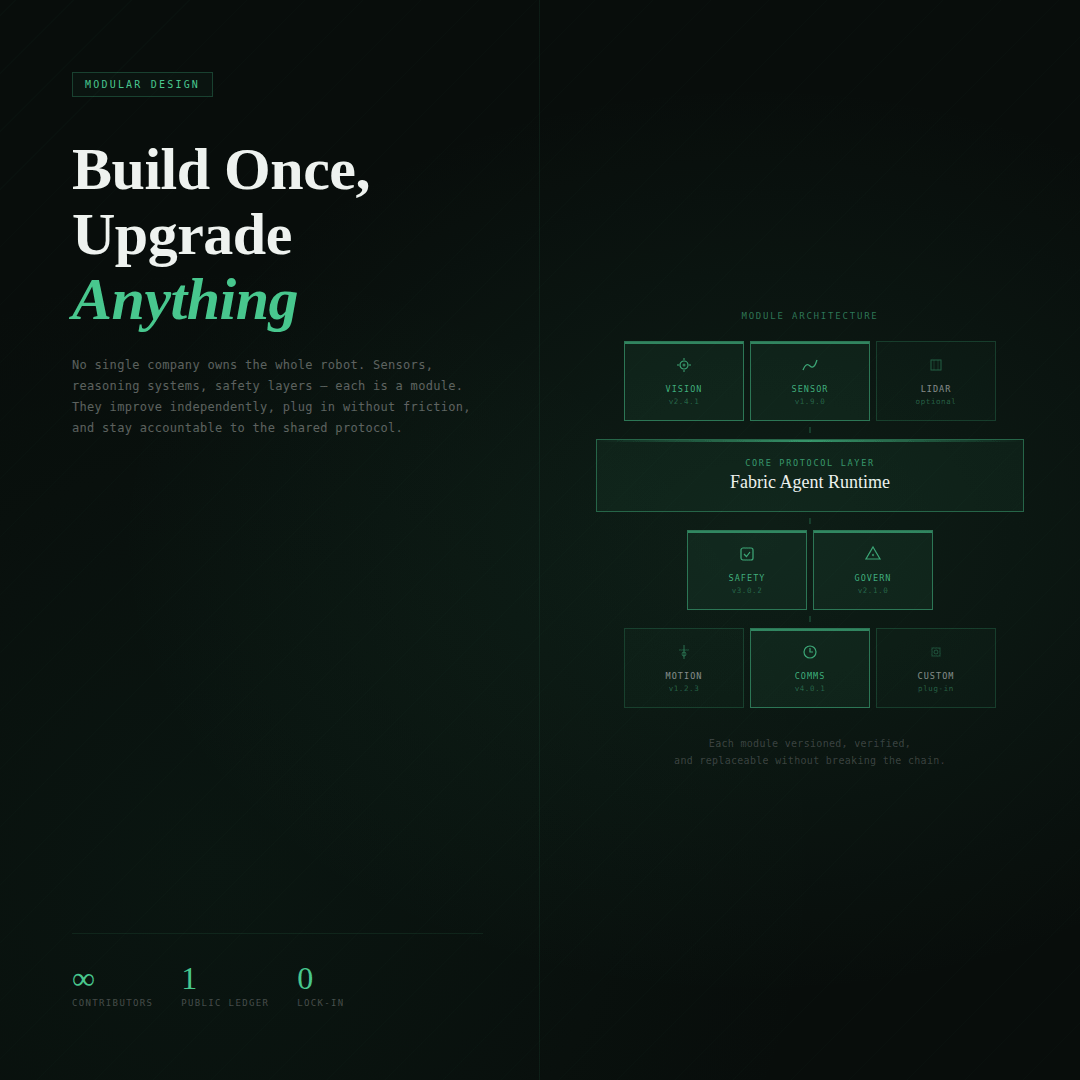
There's a modular quality to the infrastructure too. Which makes sense, if you think about how general-purpose robots will actually evolve. It won't be one company solving everything. It'll be a mix of contributions — sensors from one group, reasoning systems from another, safety constraints developed through a different process entirely. The question changes from "who builds the robot" to "how do all these pieces fit together without anyone having to blindly trust everyone else." That's the coordination problem the protocol is trying to address.
The non-profit foundation structure is worth noting, though it's easy to gloss over. Open networks have a history of starting open and closing gradually, usually as economic pressure builds. The Fabric Foundation sitting outside that pressure doesn't guarantee anything, but it changes the incentive structure. Decisions about how the protocol evolves aren't purely market decisions. That's a design choice with real implications for who can participate and how.
The phrase "agent-native infrastructure" is one of those terms that can sound more complicated than it is. What it really means is that the system was designed with autonomous agents — software that acts on its own — as a first-class consideration. Not bolted on afterward. The difference between infrastructure that accommodates autonomous agents and infrastructure designed for them is similar to the difference between a city that tolerated cars eventually and one that was planned around them from the start. You can tell which is which pretty quickly.
What Fabric is proposing isn't a finished system. It's more like a set of commitments about how a finished system should be built. Verifiable. Modular. Governed through shared rules rather than private ones. Capable of evolving through collaboration rather than acquisition.
Whether that works at the scale of a global robot network is genuinely unclear. These things are hard to predict. The ambition is real, the technical foundation seems coherent, but coordination problems at this scale have a way of surprising everyone involved.
Still, it's a different kind of starting point than most. And starting points matter, even when you can't quite see where they lead yet.
#ROBO $ROBO