Podszedłem do Fabric Protocol z rodzajem sceptycyzmu, który stał się niemal automatyczny w kręgach technologicznych skoncentrowanych na infrastrukturze. W ciągu ostatnich kilku lat przeczytałem zbyt wiele ambitnych twierdzeń o systemach, które obiecywały zrewolucjonizować koordynację, zaufanie, autonomię lub inteligencję maszyn, tylko po to, aby odkryć, że pod językiem kryje się cienka warstwa technicznej nowości owinięta wokół starego zamieszania. Wiele z tych projektów wydawało się mniej zainteresowanych rozwiązywaniem rzeczywistych problemów koordynacji, a bardziej znajdowaniem nowych powierzchni, do których można było przypiąć token, mechanizm zarządzania lub narrację decentralizacji. Robotyka, w szczególności, cierpiała z powodu tej tendencji. Jest to dziedzina oparta na tarciu, kosztach, bezpieczeństwie, utrzymaniu i regulacjach, a jednak często dyskutuje się o niej tak, jakby eleganckie abstrakcje same mogły rozwiązać upartą rzeczywistość sprzętu i ryzyka ludzkiego.

To był mój punkt wyjścia z Fabric Protocol. Przy pierwszym spotkaniu brzmiało to jak kolejna próba zebrania kilku modnych koncepcji — roboty, systemy weryfikowalne, publiczne księgi, infrastruktura agentów, współpraca zarządzająca — w jedną architekturę i ogłoszenia, że przyszłość nadeszła. Stałem się ostrożny wobec projektów, które używają wielkich słów do opisywania koordynacji na skalę planetarną, zanim będą mogły wyjaśnić, jak działa odpowiedzialność na poziomie jednej maszyny, jednego operatora, jednej nieudanej akcji. Robotyka ogólnego przeznaczenia jest już obszarem podatnym na zawyżone oczekiwania. Dodaj do tego infrastrukturę związaną z kryptowalutami lub zdecentralizowane zarządzanie, a ryzyko konceptualnego przesunięcia rośnie szybko.
To, co zmieniło moje zdanie, nie była szerokość wizji, ale podstawowe założenie, że trudny problem nie polega tylko na sprawianiu, by roboty były bardziej zdolne. Chodzi o to, aby były czytelne, zarządzalne i interoperacyjne w ramach wspólnych systemów zaufania. To rozróżnienie ma znaczenie. Duża część pracy technicznej w robotyce koncentruje się, co zrozumiałe, na percepcji, nawigacji, manipulacji, autonomii i kontroli. Ale gdy maszyny zaczynają działać w różnych organizacjach, jurysdykcjach, stosach oprogramowania i ludzkich środowiskach, zdolność to tylko jedna warstwa problemu. Głębszym wyzwaniem jest instytucjonalne: jak wiele podmiotów koordynuje zachowanie, uprawnienia, aktualizacje, odpowiedzialności i ścieżki decyzyjne maszyn, które nie są już izolowanymi produktami, ale uczestnikami szerszej sieci operacyjnej?
Fabric Protocol staje się ciekawszy, gdy patrzymy na to z tej perspektywy. Jego znaczenie, jeśli okaże się trwałe, polega mniej na idei robotów podłączonych do sieci, a bardziej na próbie stworzenia weryfikowalnej warstwy koordynacji dla aktywności maszyn. To poważniejsza ambicja, niż się wydaje na pierwszy rzut oka. W większości systemów robotycznych dzisiaj pochodzenie danych, historia działań, zależności oprogramowania, prawa dostępu i decyzje zarządzające są fragmentowane w różnych prywatnych stosach. Robot może fizycznie znajdować się w magazynie, szpitalu lub korytarzu logistycznym, ale struktura odpowiedzialności wokół niego jest często nieprzejrzysta, rozproszona wśród dostawców, operatorów, integratorów, ubezpieczycieli i wewnętrznych administratorów. Gdy coś pójdzie nie tak, system techniczny może być zaawansowany, ale system zarządzania pozostaje improwizowany.
Podstawowy wgląd architektoniczny Fabric wydaje się być taki, że koordynacja maszyn nie może się bezpiecznie rozwijać bez wspólnych mechanizmów weryfikacji. Nie weryfikacji w wąskim sensie marketingowym, ale w praktycznym sensie możliwości ustalenia, kto autoryzował co, jaki model lub polityka regulowała działanie, które źródło danych informowało decyzję, który podmiot jest odpowiedzialny za konserwację lub interwencję oraz jak aktualizacje lub uprawnienia propagują się przez sieć. To tam projekt zaczyna oddzielać się od bardziej powierzchownych eksperymentów. Nie proponuje jedynie otwartej sieci dla robotów; sugeruje, że współpraca robotów potrzebuje publicznej, inspekcyjnej struktury odpowiedzialności, jeśli ma kiedykolwiek dojrzeć ponad izolowane wdrożenia.
To również tam zarządzanie wchodzi do obrazu w bardziej znaczący sposób. Zbyt często zarządzanie w nowo powstających projektach technicznych traktowane jest jako ceremoniał: posiadacze tokenów głosują, propozycje krążą, legitymacja jest tworzona. Ale zarządzanie wokół systemów wcielonych nie może być symboliczne. Maszyna działająca w świecie fizycznym stwarza ryzyko — dla obrażeń, dla uszkodzenia mienia, dla naruszenia prywatności, dla naruszenia przepisów. Każda poważna infrastruktura dla ogólnych robotów musi traktować zarządzanie nie jako teatr społeczności, ale jako system do ograniczonego podejmowania decyzji w warunkach rzeczywistej odpowiedzialności. Kto może wdrożyć aktualizację behawioralną? Kto może cofnąć poświadczenie? W jakich warunkach maszyna może działać autonomicznie w wrażliwym środowisku? Jak rozstrzyga się spory, gdy wielu interesariuszy dzieli się roboczym przepływem robotów? To nie są abstrakcyjne pytania. To są warunki operacyjne zaufania.
Pojęcie infrastruktury natywnej dla agentów jest tutaj ważne, ponieważ implikuje, że maszyny, agenty oprogramowania i ludzkie operatory muszą być traktowani jako uczestnicy wspólnego środowiska koordynacyjnego, a nie jako izolowane punkty końcowe. To wymaga silniejszej struktury tożsamości, niż przemysł często przyznaje. Tożsamość w tym kontekście to nie branding czy profile użytkowników. To trwała, weryfikowalna reprezentacja podmiotów w sieci: maszyny, deweloperzy, operatorzy, walidatorzy, dostawcy usług, a może nawet organy regulacyjne. Bez trwałej tożsamości nie ma poważnej odpowiedzialności. Bez odpowiedzialności nie ma wiarygodnej drogi do wspólnej autonomii.
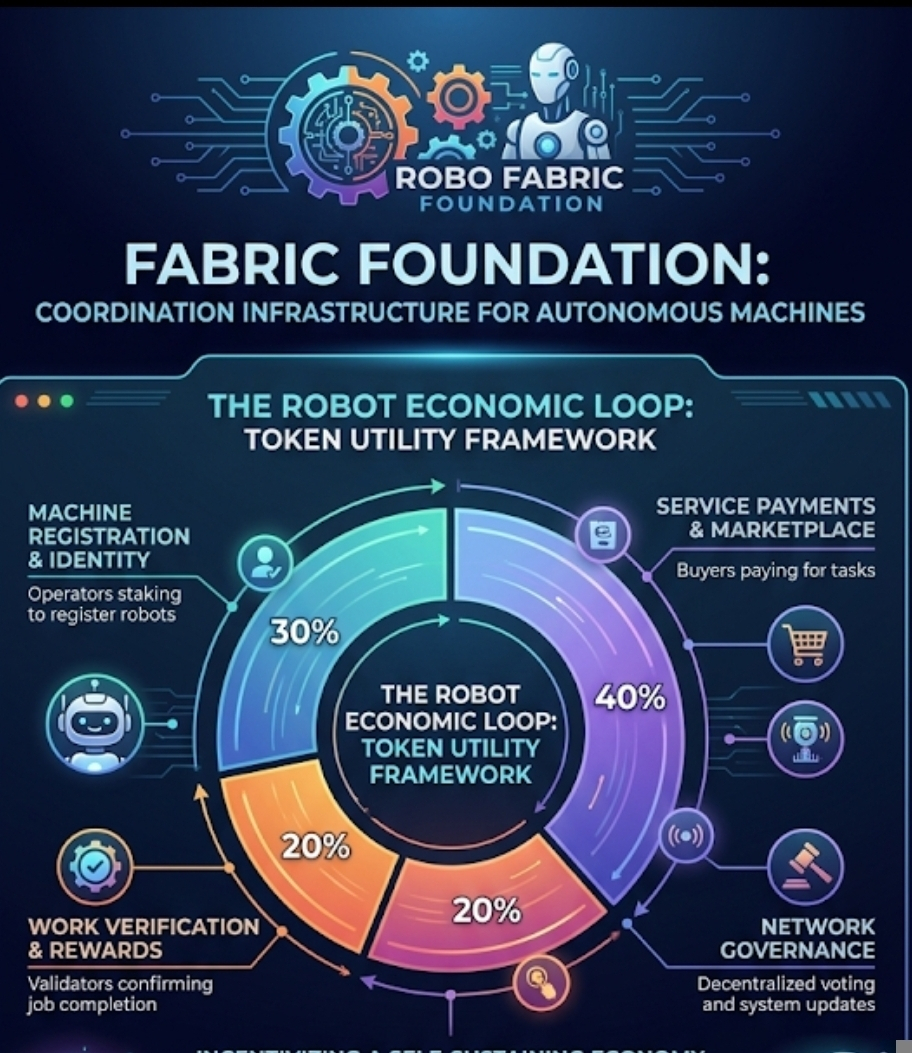
Jeśli token istnieje w takim systemie, jego rola powinna być zrozumiana dokładnie. Nie uważam, że tokeny są przekonujące, gdy tylko odtwarzają szlaki płatności lub wprowadzają spekulacje w obszary już obciążone złożonością operacyjną. Ale token może mieć sens, gdy działa jako logika koordynacji — gdy dostosowuje zachęty między uczestnikami, którzy muszą weryfikować działania, utrzymywać infrastrukturę, przydzielać obliczenia, zarządzać aktualizacjami i przejmować odpowiedzialność za zdrowie sieci. W tym modelu token nie jest punktem systemu. Jest to mechanizm do rozdzielania praw do podejmowania decyzji i odpowiedzialności ekonomicznej w sieci, która nie może polegać na jednym zaufanym operatorze. Czy Fabric odniesie sukces, będzie w części zależało od tego, czy potrafi zachować tę dyscyplinę. W momencie, gdy warstwa ekonomiczna zaczyna dominować nad warstwą koordynacyjną, architektura traci powagę.
Oczywiście, istnieją tutaj rzeczywiste ograniczenia, które są znaczne. Regulacje nie będą czekać cierpliwie na elegancką infrastrukturę do dojrzewania. Roboty działające w logistyce, opiece zdrowotnej, przestrzeniach publicznych czy w przemyśle podlegają fragmentarycznym i ewoluującym reżimom prawnym. Certyfikacja bezpieczeństwa, zarządzanie danymi, implikacje dla pracy oraz zgodność transgraniczna będą kształtować przyjęcie co najmniej w takim samym stopniu, jak zasługi techniczne. Interoperacyjność to kolejny atrakcyjny pomysł, który staje się trudny w praktyce. Dostawcy chronią swoje stosy. Przedsiębiorstwa opierają się zależności od zewnętrznych warstw zarządzania. Systemy fizyczne starzeją się, dryfują, zawodzą i wymagają konserwacji w sposób, w jaki systemy oprogramowania nie. A każda dodatkowa warstwa weryfikacji lub konsensusu wprowadza opóźnienie, koszt i obciążenie związane z wdrożeniem.
Istnieje również ryzyko filozoficzne, którego nie można zignorować. Systemy odpowiedzialności publicznej mogą wyjaśnić odpowiedzialność, ale mogą również stworzyć fałszywe poczucie kontroli, jeśli modele i zachowania pozostają słabo zrozumiane. Weryfikowalne dzienniki nie gwarantują dobrego osądu. Przezroczyste zarządzanie nie eliminuje asymetrii władzy. Modułowa infrastruktura nadal może produkować niebezpieczne zachowania, jeśli zachęty nagradzają skalę przed bezpieczeństwem. Każdy projekt, który łączy autonomiczne lub półautonomiczne agenty w szerszą sieć, musi opierać się pokusie mylenia koordynacji z mądrością.
Jednak myślałem, że Fabric Protocol odpowiada na głębszy poziom problemu niż wiele projektów w pokrewnych dziedzinach. Nie jest szczególnie trudno wyobrazić sobie, że roboty stają się bardziej zdolne. Trudno jest wyobrazić sobie świat, w którym heterogeniczne maszyny, instytucje i ludzkie interesariusze mogą koordynować te zdolności w warunkach zaufania, audytowalności i kwestionowanej władzy. To jest problem infrastrukturalny, zanim stanie się problemem produktowym. To jest problem zarządzania, zanim stanie się historią wzrostu.
Z tego powodu nie postrzegam już Fabric jako tylko kolejnego ambitnego stosu owiniętego w futurystyczny język. Widzę to jako próbę — wciąż niepewną, wciąż narażoną na wszystkie zwykłe ryzyka techniczne i instytucjonalne — zbudowania brakującej warstwy administracyjnej i weryfikacyjnej dla świata zamieszkałego przez maszyny. Może to brzmieć mniej ekscytująco niż zakłócenie, ale jest znacznie ważniejsze. Większość systemów podstawowych nie wygląda na transformacyjne na początku. Wyglądają proceduralnie, ciężko, nawet nadmiernie ostrożnie. Dopiero później zdajemy sobie sprawę, że trwały postęp zależał mniej od spektakularnej zdolności niż od cichej budowy wspólnych zasad, weryfikowalnych tożsamości i odpowiedzialnej koordynacji.
Jeśli Fabric Protocol ma znaczenie w dłuższej perspektywie, nie będzie to dlatego, że obiecał dramatyczną przyszłość robotów. Będzie to dlatego, że uznał, że gdy maszyny zaczynają uczestniczyć w naszych wspólnych środowiskach, prawdziwym zadaniem jest zbudowanie infrastruktury, która sprawi, że ich obecność będzie zarządzalna. To wolniejsza praca. To mniej efektowna praca. Ale to jest rodzaj pracy, na której będą polegać przyszłe systemy.@Fabric Foundation #ROBO $ROBO
