最近我真的上手试了Fabric项目,在测试网注册了三台不同品牌的模拟机器人,一台Unitree风格的四足、一台Figure风格的机械臂、还有一台无人机。注册完之后,我特意去下载了几个skill chips,想亲眼看看白皮书里吹的“瞬间共享技能”到底有多神。结果这一通操作下来,心情有点复杂。
流程是这样的:我先质押了一小笔$ROBO 当工作债券,把三台机器人挨个注册上链,绑定好各自的硬件身份。然后跑到Robot Skill App Store的原型区,下载了三个模块——一个精密抓取芯片、一个路径优化芯片、一个集群编队协调芯片。我本来以为下载完就能像装App一样直接插到机器人上用,结果呢?抓取芯片装到Unitree四足上还能勉强跑起来,换到Figure臂就直接报接口错误;路径优化芯片在无人机上倒是能跑,但一部分功能卡住不动;最惨的是编队协调芯片,让三台机器人协作的时候延迟高得离谱,根本没法实时同步。
我当时就愣住了:白皮书里不是说技能像手机App一样即插即用、还支持多硬件形态吗?怎么实操里跨品牌兼容性这么折腾?
带着这个疑问,我把白皮书第三章ROBO和第六章Utility又翻了一遍。仔细看下来发现,白皮书其实早就把这套机制画得清清楚楚,ROBO1采用模块化认知栈,由几十个功能特定的模块组成,skill chips就是紧凑的软件文件,指定组件和数据流,通过Robot Skill App Store让全球开发者贡献和共享。最关键的是它强调硬件抽象层和OM1 configuration files作为驱动,支持人形、四足、轮式、无人机等多种形态,理论上技能可以瞬间共享给成千上万台机器人,边际成本接近零,还能随时添加或移除。白皮书甚至举例说,一旦一个机器人学会本地法规或者精密操作,就能光速复制给其他机器人,完全避免人类几千小时的训练周期。
可我实际在测试网跑下来,这些蓝图基本没落地。目前skill chips下载速度确实快,但应用到不同硬件后接口匹配很差,OM1 drivers的集成还不完整,部分功能得手动适配,实时性在集群协作场景里明显卡顿。我去翻了GitHub和测试网代码,模块化接口的痕迹倒是能看到,但标准化协议和跨厂商驱动还没完全跑通,App Store也还只是个原型。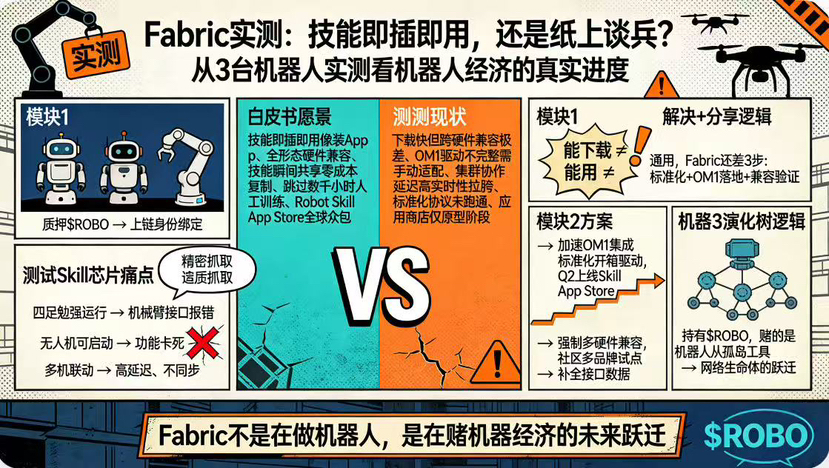
这就是白皮书和实操的落差。白皮书给了硬件无关、即插即用、全球众包的完整愿景,测试网却停在早期兼容性摸索的阶段。可能因为OM1 Beta刚推出不久,标准化工作还在追进度;也可能早期要先吸引开发者贡献,所以把重点放到了下载环节,而不是无缝应用。@Fabric Foundation
发现问题之后,我觉得解决方向其实白皮书已经指明了:
第一,加速OM1全面集成,把configuration files做成开箱即用的标准化驱动,让不同品牌的机器人下载同一个skill chips后零适配就能跑。
第二,在Q2把Robot Skill App Store正式上线测试,增加跨硬件兼容性验证任务,强制开发者提交多平台适配版本,同时用链上哈希确保模块安全。
第三,社区可以多推技能市场试点,让运营商集体跑“多品牌协作”场景,用真实数据反馈接口问题,尽快把理论蓝图变成链上现实。
我的结论是,白皮书对skill chips的模块化设计确实领先,瞬间共享、硬件抽象、App Store模式在纸面上已经把机器人技能从私有壁垒变成了公共品。但实操里跨硬件兼容性和实时应用这块还没跟上,这不是设计问题,只是早期项目必然要过的坎。如果2026年Q2能把OM1驱动和技能市场真正跑顺,Fabric就会从“能下载技能”直接跳到“全网机器人瞬间变强”,机器人经济的天花板会高一大截。
我自己还会继续在测试网多试几个芯片,每天记录兼容性数据。你要是也上手玩过skill chips,欢迎一起交流实际体验。Fabric的白皮书蓝图很扎实,只要把这些细节快速落地,机器人就不再是孤立的工具,而是真正能互相学习、互相赋能的网络伙伴。
我现在还拿着一点$ROBO,不是为了短期波动,而是赌这个技能共享的跃迁能早日实现。到那时候,干活的机器人才能真正像白皮书说的那样,光速进化。#robo