Quando ouço as pessoas falarem sobre regulamentação em robótica, o tom geralmente soa defensivo. Como se as regras fossem obstáculos que a inovação tem que contornar. Minha reação é diferente, não é empolgação, mas reconhecimento. Porque a verdadeira barreira para a adoção em larga escala da robótica não é mais a capacidade, é a coordenação. As máquinas podem mover, ver, calcular e aprender. O que elas têm dificuldade é operar dentro de sistemas que exigem responsabilidade, e a responsabilidade não surge automaticamente de um hardware melhor.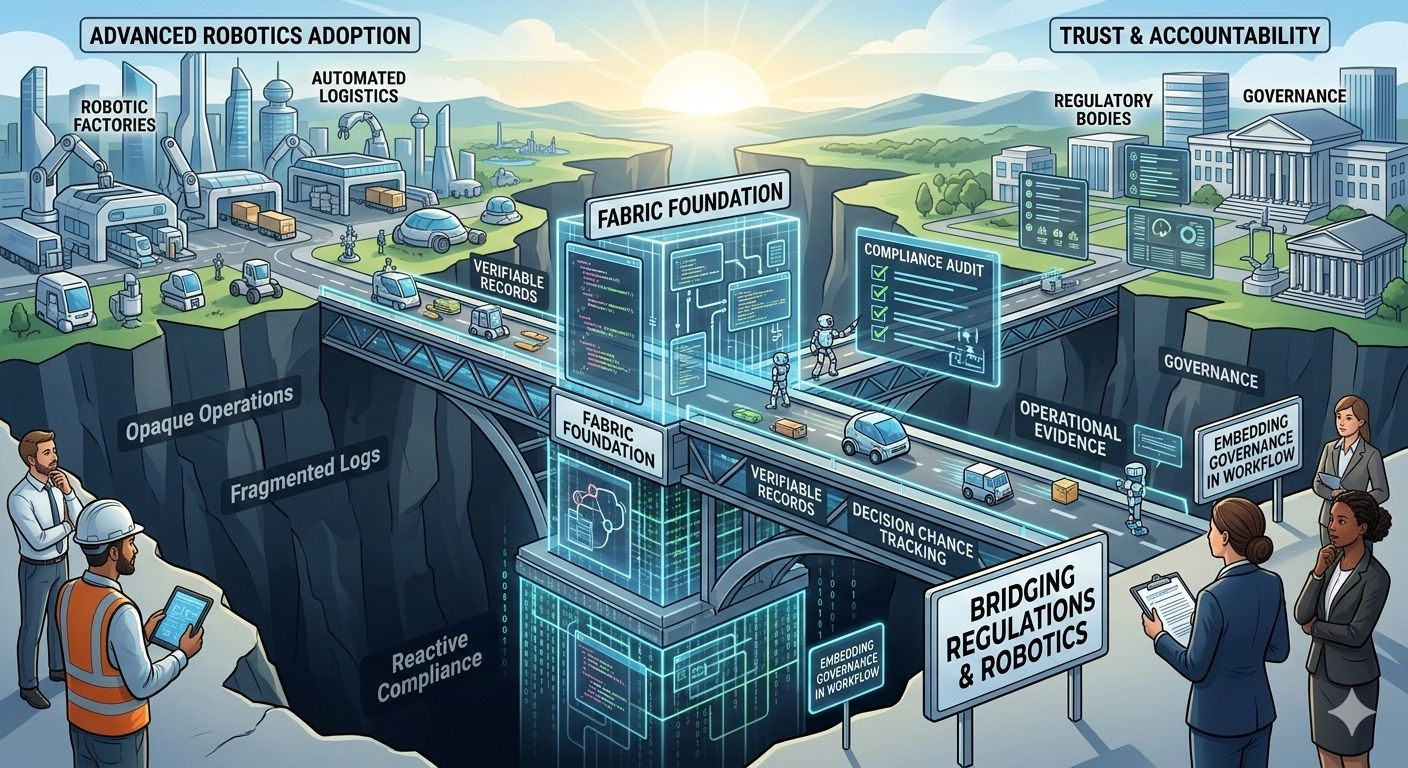
A maioria das conversas sobre robótica ainda trata a regulamentação como uma pressão externa. Construa o robô primeiro, preocupe-se com a conformidade depois. Mas no momento em que os robôs começam a interagir com economias reais, fábricas, redes de logística, infraestrutura pública, essa abordagem se rompe. A questão deixa de ser 'o robô pode fazer o trabalho?' e se torna 'quem é responsável quando ele faz?'
É aí que a direção de design em torno da Fabric Foundation se torna interessante. Não porque está construindo robôs, mas porque está tentando estruturar como robôs, dados e governança interagem desde o início.
No modelo tradicional, os robôs existem dentro de silos privados. Uma empresa implanta máquinas, coleta dados e gerencia conformidade internamente. Se algo der errado, a responsabilidade volta por meio de sistemas de relatórios corporativos, registros internos e qualquer documentação que exista. Funciona para ambientes controlados, mas não escala bem uma vez que as máquinas começam a operar entre organizações ou jurisdições.
O problema não é apenas técnico, é estrutural. Se um robô realiza uma tarefa que envolve múltiplas fontes de dados, múltiplos operadores e múltiplos modelos de IA, verificar o que realmente aconteceu se torna complicado muito rapidamente. Quem treinou o modelo? Qual conjunto de dados influenciou a decisão? Qual versão do software executou a ação? Essas perguntas são importantes não apenas para depurar sistemas, mas também para reguladores que tentam determinar a responsabilidade. A maioria das infraestruturas hoje não registra essa cadeia de eventos de uma maneira que seja verificável de forma independente.
A abordagem da Fabric inverte essa suposição. Em vez de tratar a governança como algo adicionado após a implantação, o sistema tenta incorporar a verificabilidade diretamente no fluxo de trabalho das máquinas. Cálculos, entradas de dados e resultados podem ser registrados e coordenados por meio de uma camada de infraestrutura compartilhada. O objetivo não é controlar robôs a partir de uma autoridade central, mas tornar sua atividade legível para todos que precisam confiar nela.
Uma vez que você faz isso, a regulamentação começa a parecer menos um obstáculo e mais uma camada de coordenação, porque os reguladores não estão realmente pedindo controle sobre as máquinas. O que eles querem é evidência. Evidência de que as restrições de segurança foram seguidas. Evidência de que as decisões podem ser rastreadas. Evidência de que os sistemas se comportam dentro de limites definidos. Quando essa evidência existe em registros internos fragmentados, a supervisão se torna lenta e adversarial. Quando existe em registros verificáveis, a supervisão se torna procedural. Essa diferença importa mais do que as pessoas percebem.
Na robótica de hoje, a conformidade é frequentemente reativa. Uma máquina falha, um incidente acontece e então os investigadores reconstroem o que ocorreu a partir de informações incompletas. O processo é caro, lento e às vezes inconclusivo. Incorporar computação verificável na infraestrutura muda a sequência. Em vez de reconstituir eventos após o fato, os sistemas podem demonstrar seu comportamento à medida que acontece. Mas isso também muda a responsabilidade de maneiras sutis.
Uma vez que as máquinas operam dentro de estruturas verificáveis, os operadores não podem mais confiar na ambiguidade. Cada entrada, execução de modelo e caminho de decisão se torna parte de um registro observável. Essa transparência fortalece a confiança, mas também eleva a barra para todos os envolvidos: desenvolvedores, operadores e as organizações que implantam os robôs, e é aí que o verdadeiro ato de equilíbrio começa.
Porque muita rigidez pode desacelerar a inovação tão facilmente quanto a supervisão excessiva pode erodir a confiança. Sistemas que impõem conformidade mecanicamente podem ter dificuldade em se adaptar a novos tipos de máquinas ou novos ambientes regulatórios. Por outro lado, sistemas que deixam tudo flexível correm o risco de se tornarem opacos novamente. O desafio não é simplesmente construir infraestrutura. É construir uma infraestrutura que possa evoluir junto com a tecnologia de robótica e as expectativas regulatórias.
Outra camada que as pessoas frequentemente ignoram é a interoperabilidade. Os robôs raramente operam sozinhos agora. Eles interagem com serviços de IA, plataformas de cadeia de suprimentos, software industrial e cada vez mais com outros agentes autônomos. Cada sistema carrega suas próprias políticas, permissões e limites de risco. Coordenar tudo isso requer mais do que apenas protocolos de comunicação; requer regras compartilhadas sobre como o trabalho das máquinas é verificado e governado. Sem essa camada compartilhada, a colaboração entre sistemas autônomos se torna frágil.
É por isso que a conversa regulatória em torno da robótica está lentamente se afastando de dispositivos individuais e se direcionando para estruturas operacionais. Os reguladores se importam menos com um modelo específico de robô e mais sobre se o sistema em torno desse robô pode demonstrar conformidade de forma confiável. Em outras palavras, a governança está se movendo de certificação de hardware para verificação de processos.
Infraestrutura projetada em torno de computação verificável se encaixa naturalmente nessa direção. Claro, nada disso elimina o risco. Um sistema verificável ainda pode experimentar falhas, incentivos desalinhados ou entradas defeituosas. Mas muda onde a confiança reside. Em vez de confiar em organizações individuais para relatar com precisão, os participantes confiam na infraestrutura que registra e coordena a atividade das máquinas.
Essa é uma mudança sutil, mas importante, porque uma vez que a confiança se move para a infraestrutura, ecossistemas começam a se formar ao seu redor. Os desenvolvedores criam ferramentas que assumem execução verificável. As empresas implantam robôs sabendo que a evidência de conformidade é automaticamente registrada. Os reguladores avaliam o comportamento por meio de dados estruturados em vez de relatórios fragmentados.
Com o tempo, esse alinhamento reduz a fricção entre inovação e supervisão. A parte interessante é que isso não parece dramático do lado de fora. Não há um único momento em que a robótica de repente se torna 'regulada corretamente'. Em vez disso, a mudança acontece silenciosamente à medida que sistemas que incorporam responsabilidade se tornam mais fáceis de operar do que sistemas que não o fazem. E quando isso acontece, a governança deixa de parecer uma restrição externa e começa a funcionar como parte do ambiente operacional.
Então a verdadeira questão não é se a robótica enfrentará regulamentação. Esse resultado é inevitável uma vez que as máquinas entrem nas economias do mundo real. A questão mais interessante é quais camadas de infraestrutura tornam essa regulamentação viável sem desacelerar o progresso. Porque conectar robótica e regulamentação não se trata de escrever regras mais rígidas. Trata-se de projetar sistemas onde provar um comportamento responsável é mais fácil do que esconder um comportamento irresponsável.
E o sucesso a longo prazo de abordagens como a que está surgindo em torno da Fabric provavelmente dependerá de um teste simples: quando as máquinas autônomas se tornarem comuns em várias indústrias, suas ações serão transparentes o suficiente para que as sociedades possam confiar nelas sem intervir constantemente? Essa é a ponte que importa.
@Fabric Foundation $ROBO #ROBO

