Quando ouço as pessoas falarem sobre governança descentralizada de robótica, minha primeira reação não é empolgação. É cautela. Não porque a ideia careça de ambição, mas porque a robótica sempre trouxe um problema de governança muito antes de se tornar um problema técnico. Máquinas que se movem, sentem e agem no mundo real inevitavelmente levantam questões sobre controle, responsabilidade e coordenação. O desafio nunca foi apenas construir robôs capazes. O verdadeiro desafio tem sido decidir quem governa o que esses robôs têm permissão para fazer.
A maioria dos sistemas robóticos hoje opera dentro de ambientes fechados onde a governança é centralizada por padrão. Uma empresa que implanta as máquinas controla os dados que coleta, define as regras que seguem e, em última análise, decide como esses sistemas evoluem. Isso funciona bem o suficiente para implantações isoladas, mas cria um modelo de confiança restrito. Se a organização que controla os robôs muda suas prioridades, a estrutura de governança muda com ela. A responsabilidade se torna uma política corporativa em vez de um protocolo compartilhado.
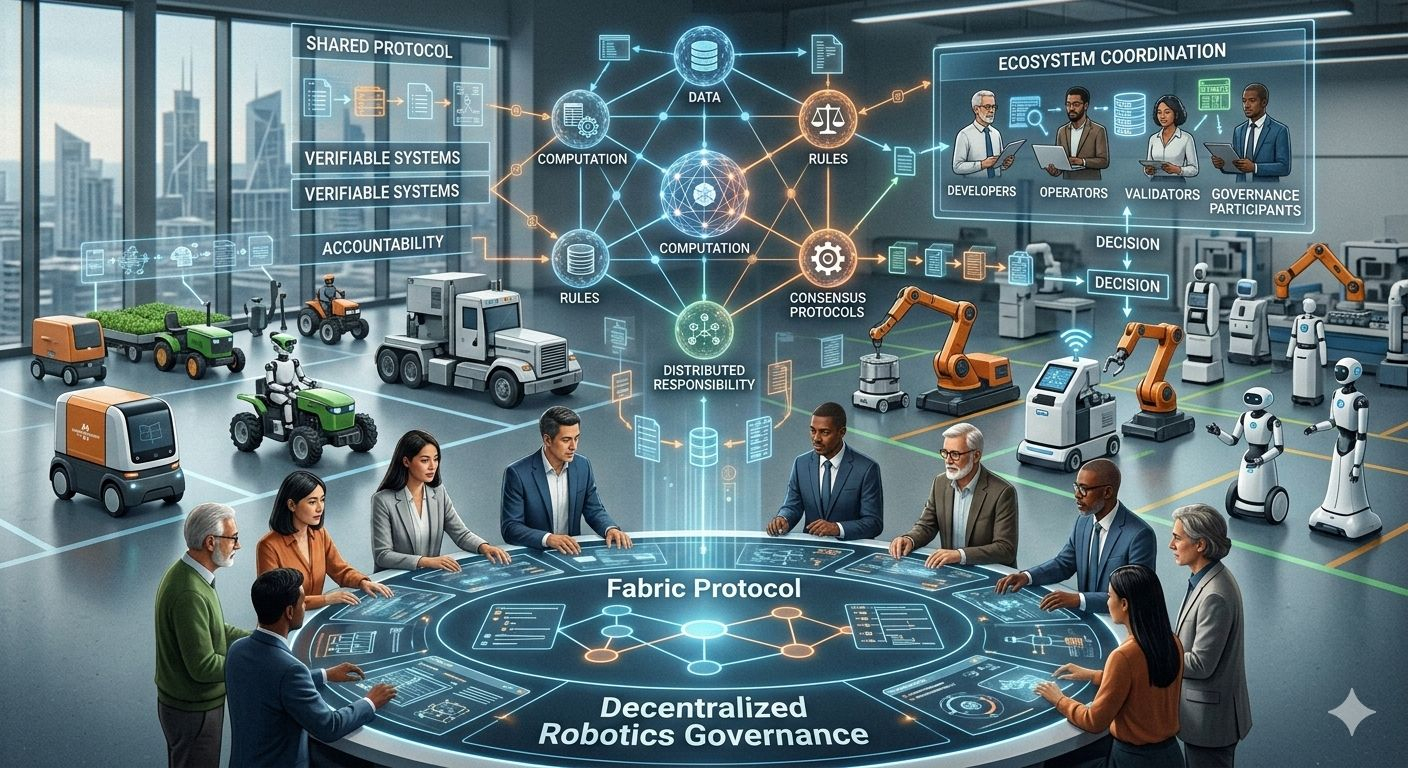
Esse é o contexto onde o Fabric Protocol começa a parecer menos um framework de robótica e mais uma mudança de infraestrutura. Em vez de tratar a governança como uma camada de política interna, trata-a como uma função de rede. Decisões sobre o comportamento da máquina, uso de dados e verificação computacional se deslocam de operadores isolados para um ambiente compartilhado coordenado por sistemas verificáveis. A governança se torna algo que os participantes podem observar, auditar e influenciar, em vez de simplesmente aceitar.
A coisa importante aqui é que a governança não desaparece quando se torna descentralizada. Ela simplesmente se move para uma estrutura diferente. Se os robôs se coordenam através de uma rede onde dados, computação e regras são registrados e verificados, então o protocolo em si se torna o ambiente onde a autoridade é negociada. Os participantes contribuem com recursos, validam resultados e impõem políticas através de uma infraestrutura compartilhada em vez de supervisão centralizada.
Essa mudança altera quem carrega a responsabilidade pela atividade da máquina. Em implantações tradicionais de robótica, a organização que opera o sistema efetivamente possui cada camada de controle. Eles definem como os modelos operam, como as decisões são executadas e como a responsabilidade é tratada quando algo falha. Em um framework descentralizado, a responsabilidade se espalha por um conjunto mais amplo de atores. Desenvolvedores constroem os sistemas, operadores implantam máquinas, validadores verificam a computação e participantes de governança influenciam as regras políticas.
Uma vez que você distribui a responsabilidade dessa forma, a arquitetura de confiança muda. Em vez de confiar em uma única entidade para gerenciar o comportamento da máquina, os participantes dependem de computação verificável e livros-razão compartilhados para confirmar que o trabalho robótico foi realizado corretamente. O protocolo se torna uma camada de coordenação onde as ações das máquinas podem ser registradas, avaliadas e validadas pela própria rede.
Isso não significa que a complexidade desaparece. Na verdade, a governança descentralizada muitas vezes introduz novas camadas de design operacional. As regras devem ser codificadas de maneiras que as máquinas e as redes possam interpretar. Disputas devem ter caminhos de resolução. Sistemas de verificação devem garantir que o trabalho da máquina corresponda ao que o protocolo afirma que realmente aconteceu. A governança se torna menos sobre autoridade e mais sobre design de sistema.
A parte interessante é como esse design começa a moldar incentivos. Se o trabalho robótico se torna verificável dentro de uma rede, então as contribuições das máquinas podem ser medidas, coordenadas e potencialmente recompensadas de maneiras que plataformas de robótica tradicionais raramente suportam. Os dados se tornam mais portáteis. A computação se torna mais transparente. A participação se torna algo que pode escalar além das fronteiras de uma única organização.
Isso cria a possibilidade de ecossistemas robóticos em vez de implantações isoladas. Máquinas construídas por diferentes desenvolvedores poderiam operar em um ambiente de governança compartilhada onde as regras são negociadas coletivamente. O fluxo de dados entre os participantes ocorre através de protocolos transparentes em vez de pipelines proprietários. A rede começa a funcionar menos como uma plataforma e mais como uma camada operacional para colaboração entre máquinas.
Claro que isso também introduz novos pontos de falha. Sistemas de governança podem se tornar lentos, fragmentados ou excessivamente complexos se a participação se expandir mais rápido do que os mecanismos de coordenação evoluem. Decisões que antes aconteciam internamente podem exigir um acordo em nível de rede. Políticas que antes mudavam rapidamente podem exigir consenso deliberado. A mesma descentralização que melhora a transparência pode, às vezes, desacelerar a capacidade de resposta.
Essa tensão é inevitável. Todo sistema descentralizado enfrenta o mesmo ato de equilíbrio entre abertura e eficiência. Controle central demais e o sistema perde credibilidade como uma infraestrutura compartilhada. Fragmentação demais e a coordenação se torna difícil. O verdadeiro teste da governança robótica descentralizada é se os protocolos podem manter tanto a confiança quanto a confiabilidade operacional à medida que a rede cresce.
O que o Fabric Protocol sugere é que a robótica pode estar entrando em uma fase onde a infraestrutura de governança se torna tão importante quanto a capacidade mecânica. Os robôs já possuem uma autonomia crescente. Eles coletam dados, tomam decisões e realizam tarefas que influenciam os ambientes físicos. À medida que essas capacidades se expandem, os sistemas que governam seu comportamento se tornam peças críticas da pilha de tecnologia.
Nesse sentido, a governança robótica descentralizada é menos sobre remover autoridade e mais sobre reestruturá-la. A autoridade se desloca de instituições para protocolos, de políticas internas para sistemas verificáveis, de operadores isolados para participantes da rede. O objetivo não é simplesmente distribuir poder, mas tornar o comportamento da máquina observável e responsável dentro de ecossistemas mais amplos.
A verdadeira questão é como esses sistemas de governança se comportam uma vez que os robôs começam a operar em grande escala. Em pequenas redes, a coordenação parece gerenciável. Em grandes ecossistemas com milhares de máquinas e participantes, a governança se torna uma negociação contínua entre transparência, eficiência e segurança. O valor a longo prazo de protocolos como o Fabric dependerá de quão bem eles mantêm esse equilíbrio quando a rede deixa de ser teórica e começa a gerenciar atividades reais de máquinas.
Então, quando penso em governança robótica descentralizada, não me concentro imediatamente na promessa de colaboração aberta. Eu me concentro na infraestrutura que precisa apoiá-la. Porque o sucesso desse modelo não será determinado por quão bem a ideia soa em teoria. Ele será determinado por se os sistemas que coordenam máquinas, dados e decisões permanecem confiáveis quando a rede se torna grande, complexa e imprevisível.
@Fabric Foundation $ROBO #ROBO

