Quando ouço as pessoas falarem sobre inovação robótica aberta, minha primeira reação não é excitação sobre novas máquinas ou demonstrações de automação realizando tarefas complexas, mas curiosidade sobre a infraestrutura que torna essas máquinas possíveis em primeiro lugar, porque a robótica não se torna verdadeiramente aberta simplesmente publicando designs ou permitindo que desenvolvedores construam aplicações, torna-se aberta apenas quando a coordenação subjacente de dados, computação, propriedade e governança é estruturada de uma forma que múltiplos participantes possam contribuir e se beneficiar sem depender de uma única autoridade central para definir as regras.

Por anos, a indústria da robótica operou dentro de um modelo onde a inovação é tecnicamente impressionante, mas estruturalmente fechada, significando que as empresas constroem sistemas robóticos poderosos, mas os dados que geram, os algoritmos que os guiam e o valor econômico que produzem permanecem trancados dentro de ecossistemas proprietários que limitam a colaboração e impedem as comunidades de pesquisa e desenvolvimento mais amplas de participar da evolução da tecnologia. Este arranjo produziu máquinas notáveis, mas também criou um ambiente onde o progresso depende fortemente dos recursos e prioridades de algumas organizações, em vez da inteligência coletiva de uma rede global.
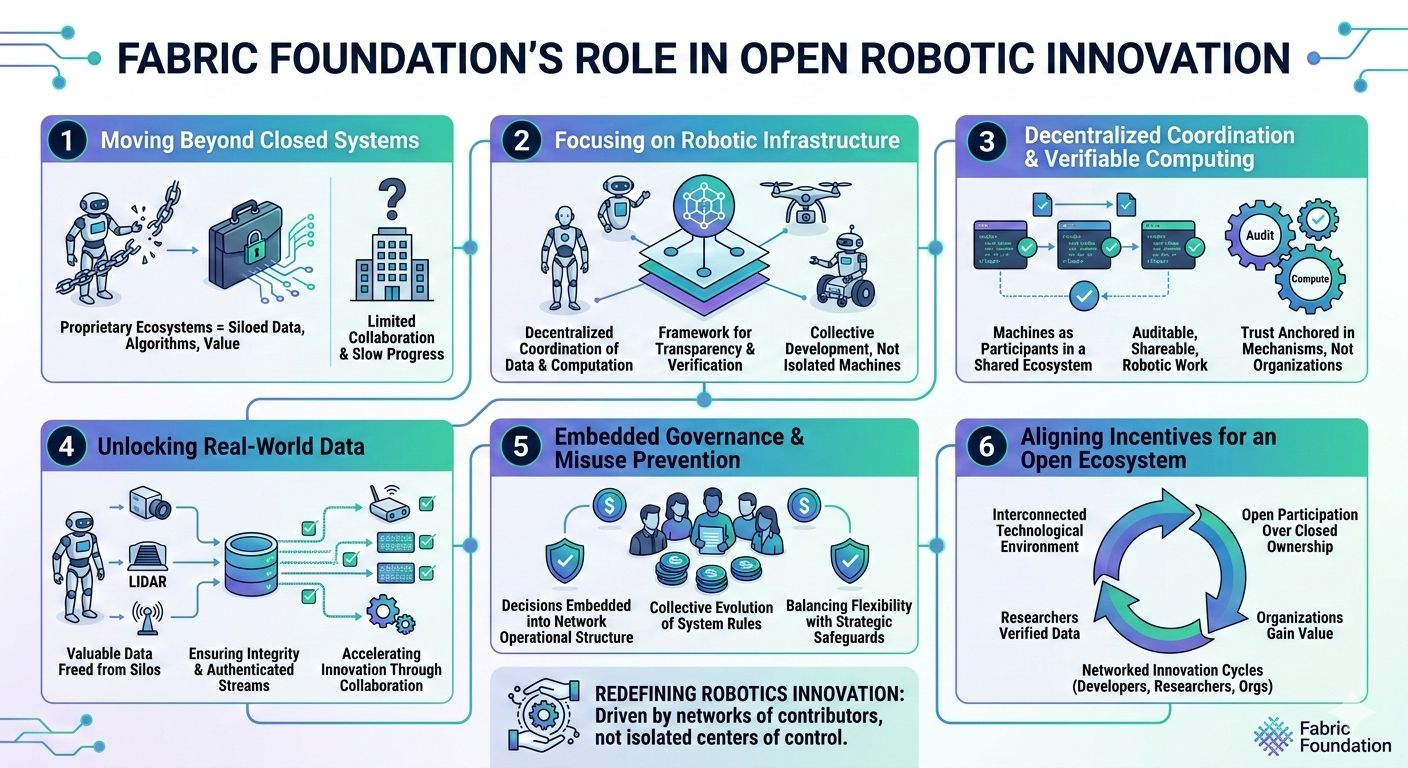
A conversa em torno da inovação robótica aberta, portanto, torna-se muito mais significativa quando o foco se desloca de robôs individuais para os sistemas que permitem que esses robôs coordenem trabalho, compartilhem dados verificáveis e evoluam através da colaboração em vez da isolação. É aqui que a abordagem de infraestrutura introduzida pela Fabric Foundation começa a mudar o cenário, não construindo um único tipo de robô ou promovendo um design de hardware específico, mas criando uma estrutura de rede onde sistemas robóticos podem operar como participantes em um ecossistema tecnológico compartilhado que valoriza transparência, verificação e desenvolvimento coletivo.
Em arquiteturas de robótica tradicionais, cada máquina funciona principalmente como uma unidade autônoma controlada pela organização que a possui, e embora esses sistemas possam trocar informações através de APIs ou serviços em nuvem, a estrutura fundamental permanece centralizada, o que significa que a confiança no sistema depende, em última análise, de confiar na organização que opera a infraestrutura. Esse arranjo funciona para muitos casos de uso industrial, mas se torna limitante quando a robótica começa a se expandir em aplicações sociais mais amplas, onde máquinas interagem com partes interessadas diversas, contribuem com dados para ambientes compartilhados e participam de fluxos de trabalho colaborativos que se estendem além dos limites operacionais de uma única empresa.
O modelo de infraestrutura desenvolvido pela Fabric introduz uma maneira diferente de pensar sobre a coordenação robótica, uma onde as máquinas não são meramente dispositivos executando instruções isoladas, mas participantes em uma rede distribuída onde suas ações, computações e saídas de dados podem ser verificadas através de mecanismos transparentes, em vez de simplesmente confiadas porque se originam de uma organização específica. Ao combinar coordenação descentralizada com princípios de computação verificável, o protocolo permite uma estrutura na qual o trabalho robótico se torna auditável, compartilhável e interoperável entre diferentes operadores, desenvolvedores e grupos de pesquisa.
Uma vez que a robótica começa a operar dentro desse tipo de ambiente, as implicações se estendem muito além do design técnico de máquinas individuais, porque a inovação aberta não se trata apenas de quem pode construir robôs, mas também de quem pode acessar o conhecimento gerado pela atividade robótica e como esse conhecimento contribui para a evolução do ecossistema. Os dados coletados por máquinas realizando tarefas no mundo real representam um dos recursos mais valiosos no desenvolvimento da robótica, mas em modelos tradicionais esses dados frequentemente permanecem isolados, impedindo pesquisadores e desenvolvedores de construir sobre eles de maneiras que poderiam acelerar o progresso em todo o campo.
A introdução de coordenação de dados verificáveis através de uma camada de infraestrutura muda essa dinâmica ao permitir que sistemas robóticos contribuam com informações para redes compartilhadas enquanto mantêm mecanismos de autenticação e responsabilidade, garantindo que os participantes possam confiar na integridade das informações sem precisar confiar na entidade que originalmente a gerou. Nesse ambiente, a inovação torna-se menos dependente de avanços isolados e mais dependente de colaboração cumulativa, onde melhorias feitas por um participante podem informar o trabalho de outros ao longo da rede.
No entanto, criar uma estrutura para inovação robótica aberta também levanta novas questões sobre governança e responsabilidade, porque uma vez que as máquinas começam a contribuir com dados e executar tarefas dentro de uma infraestrutura compartilhada, torna-se necessário determinar como as decisões sobre regras do sistema, permissões de acesso e padrões operacionais são feitas. A camada de governança, portanto, torna-se tão importante quanto a infraestrutura computacional em si, já que o sucesso a longo prazo de um ecossistema aberto depende do equilíbrio entre flexibilidade para desenvolvedores e salvaguardas que impedem o uso indevido ou instabilidade dentro da rede.
Esta é outra dimensão onde a arquitetura apoiada pela Fabric se torna estrategicamente significativa, porque o protocolo não trata a governança como um pensamento posterior, mas a integra diretamente na infraestrutura que coordena a atividade da máquina. Ao incorporar estruturas de tomada de decisão na estrutura operacional da rede, o ecossistema pode evoluir coletivamente em vez de depender de uma única autoridade para ditar a direção do desenvolvimento.
De uma perspectiva mais ampla, o aspecto mais interessante dessa abordagem não é simplesmente que robôs podem compartilhar dados ou coordenar tarefas em uma rede descentralizada, mas que os incentivos econômicos e tecnológicos dentro do sistema começam a se alinhar com a participação aberta em vez de propriedade fechada. Os desenvolvedores ganham a capacidade de construir aplicações que interagem com uma rede de máquinas em vez da plataforma de um único fornecedor, pesquisadores ganham acesso a dados verificáveis que suportam experimentação e descoberta, e organizações que implantam robôs ganham uma estrutura onde suas contribuições podem gerar valor além da tarefa imediata que essas máquinas realizam.
Essa mudança nos incentivos transforma gradualmente a robótica de uma coleção de sistemas isolados em um ambiente tecnológico interconectado onde máquinas, desenvolvedores e organizações todos contribuem para um ciclo de inovação compartilhado. Em vez de cada nova geração de robôs emergir de laboratórios corporativos separados, as melhorias podem se propagar através do ecossistema de maneiras que aceleram o progresso enquanto mantêm transparência sobre como essas melhorias são implementadas.
Claro, a eficácia dessa visão depende, em última análise, de quão bem a infraestrutura funciona quando o ecossistema cresce em escala e complexidade, porque sistemas abertos devem ser resilientes não apenas em períodos de desenvolvimento rápido, mas também durante momentos em que interesses concorrentes, desafios técnicos ou comportamentos inesperados testam a estabilidade da rede. Estruturas de coordenação que parecem elegantes na teoria devem provar que podem manter confiabilidade, responsabilidade e segurança, mesmo à medida que a participação se expande e o volume de dados gerados por máquinas aumenta dramaticamente.
É por isso que o papel dos provedores de infraestrutura na inovação robótica aberta é muito mais significativo do que pode parecer à primeira vista, uma vez que eles são responsáveis por garantir que os mecanismos que possibilitam a colaboração não introduzam vulnerabilidades que minem a confiança no sistema. Se a verificação falhar, a governança se torna ineficaz, ou a coordenação desmorona sob pressão, a promessa da robótica aberta poderia facilmente reverter para o modelo familiar de plataformas proprietárias isoladas.
Visto sob esta perspectiva, a verdadeira importância da abordagem da Fabric não está em promover uma categoria específica de robôs ou aplicações, mas em estabelecer as condições estruturais que permitem que a robótica evolua como um domínio tecnológico verdadeiramente colaborativo, em vez de uma coleção fragmentada de sistemas independentes. Ao criar uma infraestrutura que conecta máquinas, desenvolvedores e organizações através de computação verificável e coordenação descentralizada, a fundação está tentando redefinir como a inovação ocorre dentro de um dos campos tecnológicos mais transformadores da era moderna.
A importância a longo prazo desse esforço será medida, em última análise, não pelo número de robôs conectados à rede no curto prazo, mas por saber se o ecossistema consegue demonstrar que a infraestrutura aberta pode suportar colaboração confiável, segura e escalável entre máquinas operando no mundo real. Se esse resultado for alcançado, então o significado da inovação robótica aberta mudará de um ideal abstrato para uma realidade prática onde a evolução da robótica é impulsionada por redes de colaboradores em vez de centros isolados de controle.
@Fabric Foundation #ROBO $ROBO


