
@Fabric Foundation . Eu me lembro de assistir a um robô de armazém deslizar por um corredor uma vez, pegando, escaneando, ajustando sua rota sem hesitação. O movimento era quase elegante. Mas o sistema por trás disso era menos impressionante uma vez que você olhasse mais de perto. Um painel fechado. Lógica de roteamento proprietária. Cada comando, em última análise, rastreava de volta para a infraestrutura de uma única empresa.
Esse padrão aparece em toda parte na robótica.
Máquinas que parecem autônomas na superfície geralmente operam dentro de ambientes de software rigorosamente controlados. A inteligência pode estar distribuída entre sensores e modelos, mas a autoridade por trás do sistema permanece centralizada.
O que levanta um tipo diferente de questão: o que acontece quando os robôs operam em redes abertas em vez de sistemas corporativos fechados?
Esta é a direção que a Fabric Foundation está explorando através do Fabric Protocol—uma camada de infraestrutura projetada para coordenar máquinas inteligentes usando computação verificável e arquitetura nativa de agentes. A ideia é bastante radical se você segui-la: robôs, agentes de IA e humanos interagindo através de um protocolo compartilhado onde identidade, tarefas e resultados podem ser verificados sem depender de um operador central.
Se essa arquitetura realmente funciona em grande escala ainda é uma questão em aberto. Mas a direção em si sinaliza algo importante. Robótica, IA e infraestrutura descentralizada estão começando a convergir de maneiras que parecem menos teóricas do que eram há alguns anos.
Fundamentos Arquitetônicos
A maioria dos sistemas de robótica hoje é projetada como pilhas verticais. Hardware na base, camadas de controle de software acima e orquestração centralizada no topo.
O Fabric Protocol aborda o problema de forma diferente. Em vez de construir uma plataforma de robótica fechada, ele tenta criar uma camada de coordenação onde as máquinas possam interagir através de infraestrutura compartilhada.
Dois componentes aparecem imediatamente no design: identidade e verificação. Uma terceira camada—coordenação—emerge quase como o tecido conectivo entre elas.
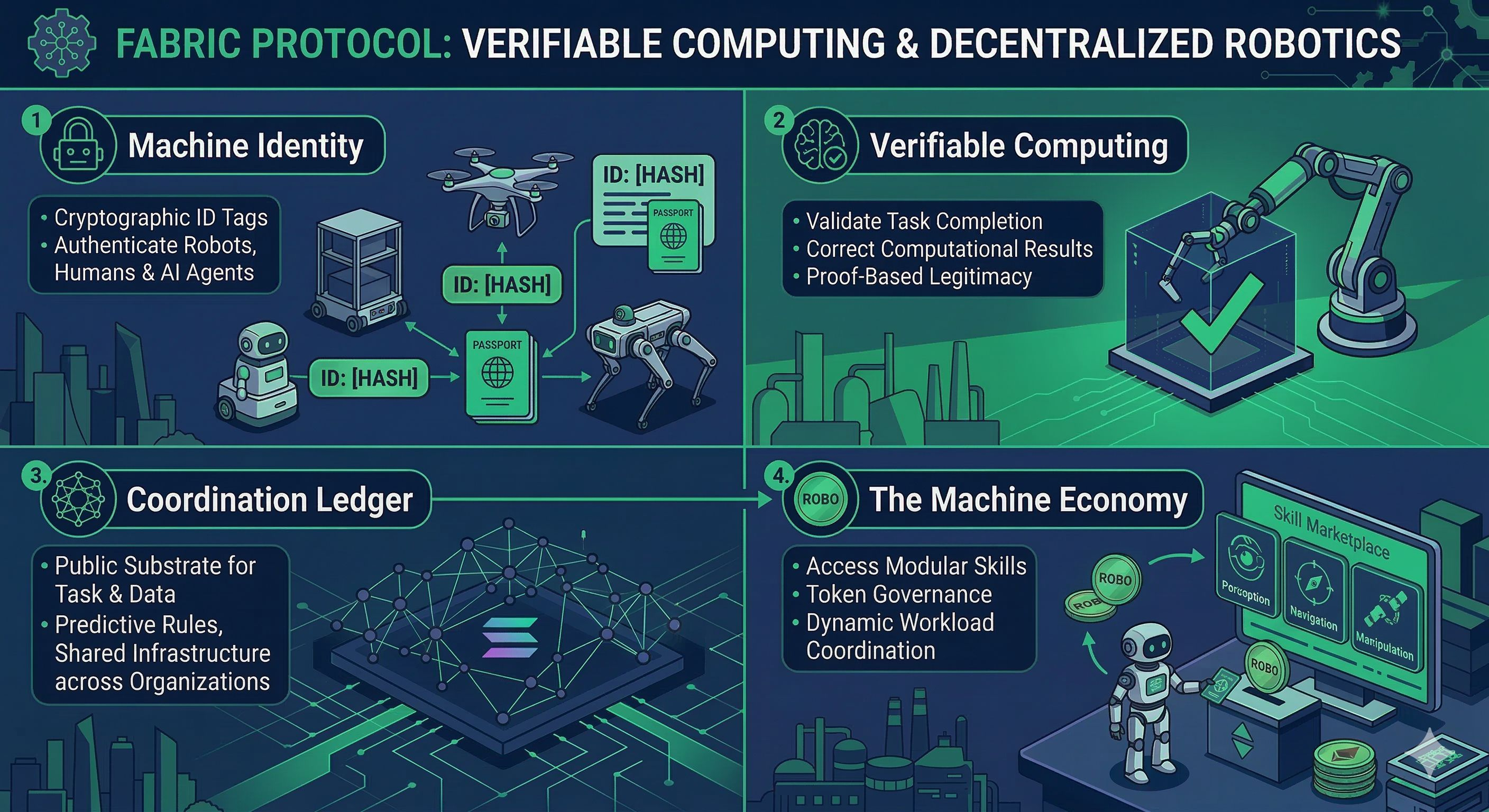
Identidade da Máquina
Cada participante da rede recebe uma identidade criptográfica registrada em um livro-razão público.
Isso inclui humanos, agentes de IA e robôs físicos.
O efeito soa simples, mas muda como as máquinas interagem com os sistemas ao seu redor. Um robô pode autenticar a si mesmo na rede. Tarefas podem ser atribuídas a máquinas específicas. E, em certos casos, as máquinas podem executar transações vinculadas à sua identidade.
Em vez de existir como pontos finais de hardware anônimos, os robôs começam a se comportar mais como nós dentro de um sistema distribuído.
Computação Verificável
A camada mais interessante, no entanto, é a Computação Verificável.
Em ambientes descentralizados, a confiança rapidamente se torna um problema. Se um robô afirma que completou uma tarefa—ou um modelo de IA afirma que produziu um resultado—como o restante da rede sabe que essa afirmação é legítima?
O Fabric aborda isso através de mecanismos de verificação criptográfica que permitem que saídas computacionais sejam provadas em vez de simplesmente relatadas.
Essa camada de prova pode validar várias coisas:
que uma tarefa robótica realmente ocorreu
que um resultado computacional foi gerado corretamente
que um agente seguiu regras de execução específicas
Em vez de depender de sistemas de monitoramento centralizados, a própria rede se torna a estrutura de verificação.
Livro-razão de Coordenação
Identidade e verificação sozinhas não criam um sistema funcional. As máquinas ainda precisam de um ambiente compartilhado onde tarefas, saídas e atividades econômicas possam ser registradas.
É aqui que a camada de coordenação aparece.
O protocolo mantém um livro-razão público onde a atividade da rede é ancorada. Atribuições de tarefas, ações de máquinas, provas de verificação e pagamentos fluem todos através desta camada. Funciona menos como um livro-razão de blockchain tradicional e mais como um substrato de coordenação—um ambiente onde vários tipos de agentes podem interagir com regras previsíveis.
Infraestrutura Nativa de Agentes
A maioria das plataformas digitais assume que há um humano em algum lugar atrás do teclado.
Fabric não faz isso.
A infraestrutura é projetada com a expectativa de que agentes autônomos—sistemas de software e máquinas—interajam diretamente uns com os outros.
Isso muda como as redes precisam se comportar.
A comunicação máquina-a-máquina se torna rotineira. Agentes descobrem tarefas sem intervenção humana. Transações podem ocorrer automaticamente quando o trabalho é concluído. O sistema começa a se assemelhar mais a um mercado de trabalho automatizado do que a uma plataforma de software tradicional.
Não é difícil imaginar como isso evolui. Uma vez que as máquinas podem autenticar a si mesmas, verificar seu trabalho e liquidar transações, os ingredientes básicos de uma economia de máquinas começam a aparecer quase naturalmente.
Cognição Modular e Camadas de Habilidades
Outra decisão interessante na arquitetura é como a inteligência é estruturada.
Em vez de incorporar um enorme modelo de IA dentro de cada robô, o sistema incentiva camadas de cognição modulares. Os robôs podem tirar proveito de vários módulos de capacidade—modelos de percepção, sistemas de navegação, camadas de raciocínio e, eventualmente, habilidades de manipulação.
Esses módulos funcionam quase como extensões de software.
Os desenvolvedores podem melhorá-los de forma independente. Novas capacidades podem ser introduzidas sem reconstruir máquinas inteiras. Com o tempo, o ecossistema poderia começar a se assemelhar a um mercado de habilidades robóticas, onde algoritmos especializados se tornam infraestrutura compartilhada em toda a rede.
É uma escolha de design sutil, mas que se alinha bem com modelos de desenvolvimento descentralizados.
A Economia do Token ROBO
A coordenação econômica dentro do ecossistema é facilitada pelo token nativo da rede, ROBO.
A maioria dos tokens nesta indústria eventualmente se comporta como ativos especulativos. A Fabric está tentando algo ligeiramente diferente ao vincular o token diretamente a funções operacionais dentro da rede.
Robôs e agentes usam o token para acessar serviços como verificação, registro de identidade e coordenação computacional.
O token também desempenha um papel na governança. Participantes podem votar em atualizações de protocolo, parâmetros de infraestrutura e ajustes de políticas. Em teoria, isso distribui a tomada de decisões em todo o ecossistema em vez de concentrá-la dentro de uma única organização.
Se a governança funciona suavemente em sistemas que coordenam máquinas físicas ainda é uma questão em aberto—mas o mecanismo pelo menos tenta alinhar incentivos entre desenvolvedores, provedores de infraestrutura e operadores.
Aplicações Potenciais
A logística é o ponto de partida óbvio.
Armazéns, sistemas de entrega e frotas robóticas já operam com automação significativa. Uma camada de coordenação descentralizada poderia permitir que esses sistemas interagissem entre organizações em vez de permanecerem trancados dentro de plataformas proprietárias.
A automação industrial provavelmente seguirá. Fábricas que implantam frotas de máquinas poderiam coordenar cargas de trabalho dinamicamente com base na demanda em redes compartilhadas.
A manutenção da infraestrutura é menos óbvia, mas potencialmente maior. Sistemas autônomos responsáveis por inspecionar tubulações, manter redes de energia ou monitorar condições ambientais poderiam operar sob coordenação descentralizada.
E então há mercados de serviços—robôs realizando tarefas de limpeza, inspeção, segurança ou entrega que descobrem trabalho autonomamente através de mercados digitais.
Em cada caso, as máquinas param de se comportar como equipamentos estáticos. Elas começam a parecer mais com atores econômicos participando de redes.
Desafios e Perguntas Abertas
Claro, a robótica introduz complicações que sistemas de blockchain puramente digitais raramente enfrentam.
A confiabilidade do hardware é importante. A segurança física é ainda mais importante. Um servidor comprometido pode causar perda de dados; um robô comprometido pode causar danos no mundo real.
A segurança, portanto, torna-se mais complexa. As vulnerabilidades da rede não são mais apenas problemas de software.
A escalabilidade é outra preocupação. Coordenar milhares—para não dizer milhões—de máquinas autônomas através de infraestrutura descentralizada exigirá sistemas de verificação extremamente eficientes.
Também não está claro como os quadros regulatórios evoluirão em torno das economias de máquinas. Os sistemas legais ainda estão lutando para definir a responsabilidade quando sistemas autônomos tomam decisões.
Todas essas questões estão logo abaixo da superfície da arquitetura.
A Economia de Máquinas Emergente
Por anos, sistemas de blockchain se concentraram quase inteiramente na coordenação financeira—tokens, pagamentos, trocas descentralizadas.
Mas à medida que os modelos de IA melhoram e a robótica continua avançando, uma nova fronteira começa a aparecer.
Redes que coordenam trabalho físico.
É aí que o Fabric Protocol se torna interessante. Não necessariamente porque cada parte da visão terá sucesso, mas porque tenta conectar várias tendências tecnológicas que estão se movendo umas em direção às outras de qualquer maneira: agentes inteligentes, máquinas autônomas e infraestrutura descentralizada.
Se sistemas como este algum dia operarem em grande escala, as implicações começam a se estender muito além das criptomoedas.
Porque nesse ponto a rede não está apenas coordenando dados ou ativos.
Está coordenando máquinas.
