
Ninguém Possui as Estradas
É porque se uma empresa possuísse todas as estradas, cada outra empresa estaria à sua mercê. Toda a economia dependeria das decisões de uma única entidade: seus preços, suas prioridades, sua disposição em deixar você passar.
Descobrimos isso há séculos com infraestrutura física. Estradas, pontes, portos, vias navegáveis. O que tudo mais depende precisa ser compartilhado. Não porque compartilhar é nobre. Porque a alternativa quebra tudo.
Os robôs vão precisar de sua própria versão de estradas. E agora, essa infraestrutura não existe.
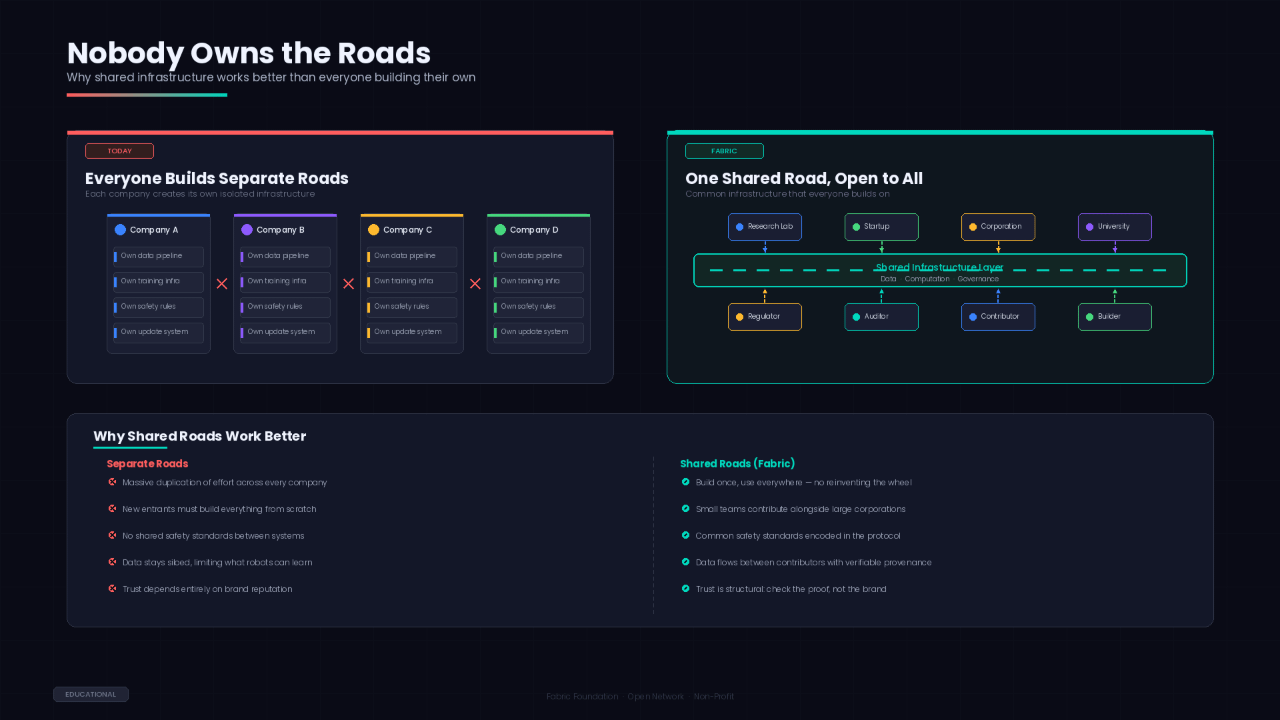
Eu tenho observado o espaço da robótica por um tempo, e há um padrão que continua se formando. Cada grande empresa constrói sua própria pilha. Seus próprios pipelines de dados. Sua própria infraestrutura de treinamento. Seus próprios protocolos de segurança. Seus próprios sistemas de atualização. Faz sentido do ponto de vista competitivo. Você quer controle. Você quer se mover rápido. Você não quer esperar por comitês.
Mas se você ampliar um pouco, perceberá o que está acontecendo. Todo mundo está construindo estradas separadas. Estradas que não se conectam. Estradas com larguras diferentes, regras diferentes, sistemas de pedágio diferentes. E cada nova empresa que entra no espaço tem que construir suas próprias estradas do zero antes de poder até começar a trabalhar na coisa que realmente importa: os robôs.
Isso é uma quantidade extraordinária de esforço duplicado. E fica pior à medida que a indústria cresce, não melhor.
@Fabric Foundation O protocolo é uma tentativa de construir as estradas compartilhadas. É uma rede aberta global, administrada pela Fabric Foundation, uma organização sem fins lucrativos que fornece infraestrutura comum para o desenvolvimento de robôs de propósito geral. A palavra "aberto" é importante aqui, e significa algo específico.
Aberto não significa livre para todos. Não significa que ninguém está no comando. Significa que a infraestrutura não é propriedade de nenhuma empresa única, as regras são transparentes e participativas, e qualquer um que atenda aos padrões pode usá-la e contribuir para ela. É mais próximo de como a internet funciona ou pelo menos como a internet foi projetada para funcionar do que da maneira como a maioria das plataformas tecnológicas opera hoje.
O protocolo coordena três coisas através de um livro-razão público: dados, computação e governança. Cada um deles, por si só, é um desafio enorme. Juntos, formam algo como uma camada operacional compartilhada para todo o campo da robótica.
Deixe-me começar explicando por que o problema dos dados é na verdade um problema de estradas.
Treinar um robô de propósito geral requer dados do mundo real. Não uma simulação. Não um laboratório. O mundo real, bagunçado, caótico e culturalmente específico. Uma cozinha em Mumbai parece diferente de uma cozinha em Munique. A maneira como as pessoas se movem, os objetos que usam, as expectativas que têm são todas diferentes. Um robô que foi treinado apenas com dados de uma geografia ou de um tipo de ambiente vai ter dificuldade em qualquer outro lugar.
Portanto, você precisa de dados de todos os lugares. O que significa que você precisa de muitos contribuintes. O que significa que você precisa de um sistema que rastreie quem contribuiu com o quê, sob quais condições, com quais permissões. Caso contrário, ninguém contribui. As pessoas guardam seus dados porque não confiam em como serão usados. Isso é racional. E é exatamente o que desacelera todo o campo.
O livro-razão da Fabric cria um registro verificável das contribuições de dados. Não é um contrato que você assina e esquece. Um verdadeiro histórico auditável, proveniência, termos, histórico de uso que qualquer um pode verificar. Isso não faz o problema de confiança desaparecer, mas dá estrutura a ele. Você geralmente pode perceber quando um sistema está funcionando porque as pessoas param de se preocupar se estão sendo enganadas e começam a se concentrar no trabalho real.
A parte da computação é onde as coisas ficam interessantes de uma maneira que a maioria das pessoas não aprecia imediatamente.
Quando um modelo é treinado, digamos, um modelo que controla como um robô navega em um espaço lotado, o processo de treinamento envolve dados específicos, algoritmos específicos e etapas computacionais específicas. No mundo atual, você apenas confia que a empresa fez isso corretamente. Talvez eles tenham controles de qualidade internos. Talvez não. Você não tem como saber.
A Fabric usa computação verificável para mudar essa dinâmica. A ideia é que, quando uma computação acontece na rede, ela produz uma prova criptográfica - um recibo matemático de que a computação foi realizada exatamente como descrita. Não "nós fizemos alguns testes e parecia bom". Na verdade, provadamente correto. Qualquer um pode verificar a prova independentemente.
Para software do dia a dia, isso pode parecer exagero. Mas pense em robôs operando em hospitais. Em canteiros de obras. Em casas com pessoas idosas ou crianças. As consequências de uma atualização de modelo ruim não são um aplicativo travado. Elas são um perigo físico. Nesse contexto, "confie em nós" começa a parecer inadequado. "Verifique a prova" parece mais apropriado.
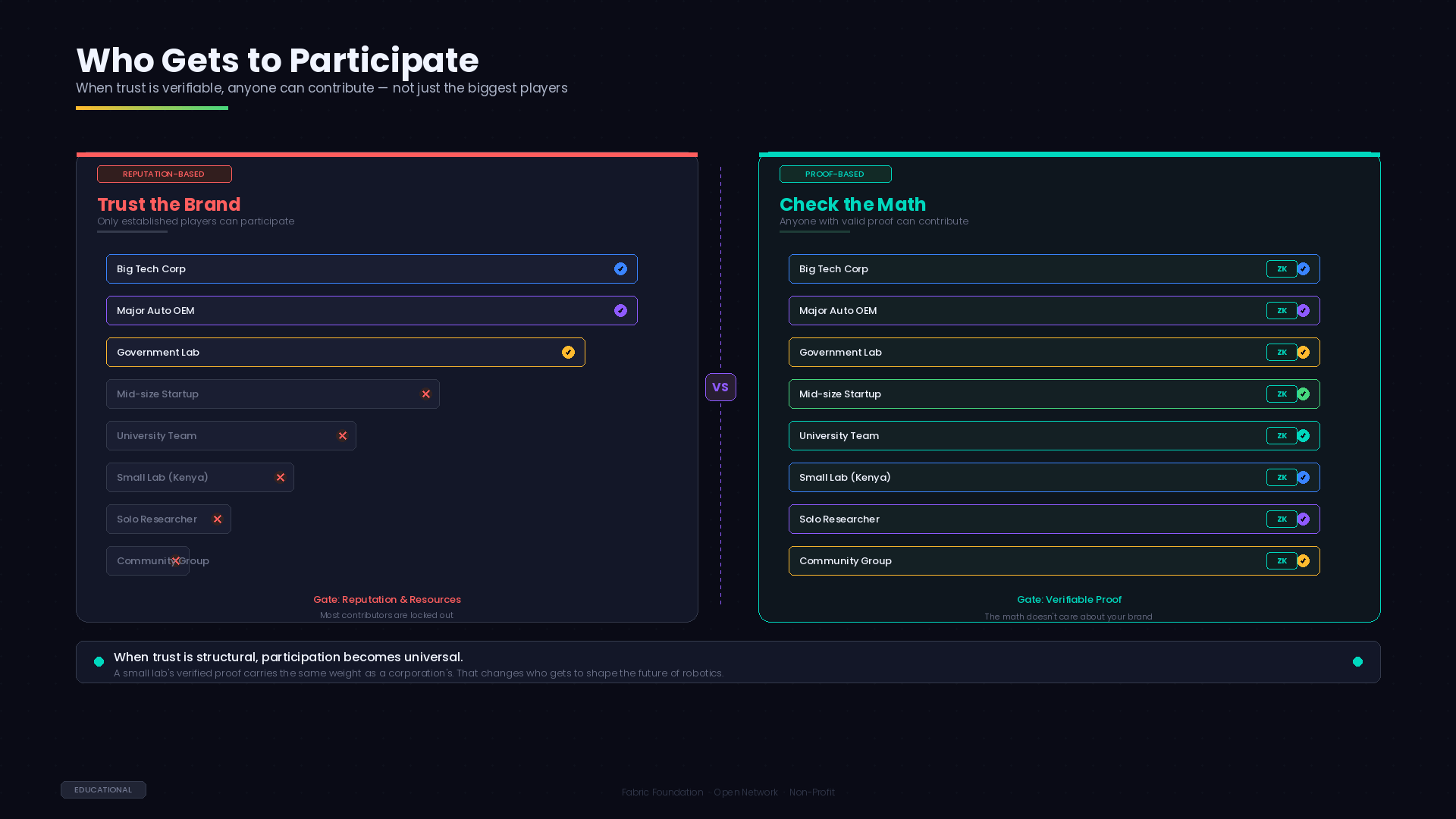
Fica óbvio depois de um tempo que isso não é apenas sobre segurança. É sobre quem pode participar. Se a única maneira de confiar em um sistema robótico é confiar na empresa que o construiu, então apenas grandes empresas consolidadas com reputações a aproveitar podem participar. Mas se a confiança é baseada em prova verificável, então um pequeno laboratório em Nairóbi ou uma equipe universitária em São Paulo pode contribuir para a mesma rede que uma corporação multinacional. O trabalho deles fala por si só. A matemática não se importa com a sua marca.
A governança é a terceira parte, e honestamente, é a que eu acho mais difícil de avaliar. Não porque o conceito esteja errado - é obviamente certo que os robôs precisam de regras e que essas regras devem ser desenvolvidas de forma transparente. Mas porque a governança é fundamentalmente uma atividade humana, e as atividades humanas são bagunçadas de maneiras que nenhum protocolo pode abordar completamente.
O que a Fabric faz é tornar o processo de governança explícito. Propostas para padrões, políticas e regras de segurança são submetidas, debatidas e decididas em cadeia. Todo o histórico é público. Você pode rastrear qualquer regra até a discussão que a produziu. Você pode ver quem votou em quê.
Isso é uma verdadeira melhoria em relação ao status quo, onde os padrões de segurança para robôs são tipicamente definidos por empresas individuais ou por órgãos reguladores que se movem lentamente e muitas vezes carecem de entendimento técnico. A governança participativa, registrada em um livro-razão público, pelo menos cria as condições para a responsabilidade.
Mas condições não são resultados. Processos abertos ainda podem ser capturados por grupos bem organizados. Participativo não significa automaticamente representativo. As dinâmicas de poder que existem no mundo real não desaparecem só porque você coloca decisões em uma blockchain. Eu não acho que a Fabric reivindique o contrário, mas vale a pena ter clareza sobre as limitações.
Há uma filosofia de design por trás de tudo isso que é fácil de perder. A Fabric é nativa de agentes. Isso significa que a infraestrutura presume que seus principais usuários não são pessoas. Eles são agentes de software autônomos - programas que solicitam dados, negociam recursos, submetem provas e interagem com sistemas de governança por conta própria.
Isso é um grande problema do que pode parecer. A maioria das infraestruturas que construímos presume um humano no loop. Alguém revisa. Alguém aprova. Alguém lê a mensagem de erro e decide o que fazer. A infraestrutura nativa de agentes presume o oposto: as máquinas são os participantes padrão, operando em velocidade de máquina, sob regras que os humanos definem, mas não aplicam pessoalmente em tempo real.
A pergunta muda de "como uma pessoa gerencia esse robô" para "como os robôs coordenam entre si de uma maneira que os humanos possam confiar e auditar". Esse é um problema de design fundamentalmente diferente. E é um que a maioria da conversa sobre robótica ainda não acompanhou.
Eu continuo voltando à metáfora das estradas. Não porque seja perfeita - nenhuma metáfora é - mas porque captura algo importante. Estradas funcionam porque são compartilhadas. Porque seguem padrões que todos concordam. Porque você não precisa de permissão do proprietário da estrada para dirigir nela. Porque as regras são as mesmas para todos, quer você esteja dirigindo um caminhão de entrega ou um sedan de família.
A infraestrutura para robótica precisa funcionar da mesma maneira. Padrões compartilhados. Acesso aberto. Regras transparentes. Conformidade verificável. Não porque isso seja idealista. Porque a alternativa, pilhas proprietárias até o fim, com cada empresa construindo seu próprio mundo isolado, não escala. Nunca funcionou para qualquer infraestrutura que importa.
Se o Fabric Protocol se tornará o padrão ou apenas um dos primeiros experimentos que mostra às pessoas como o padrão precisa ser - isso é incerto agora. Essas coisas se desenrolam lentamente. As pessoas que constroem a infraestrutura subjacente raramente conseguem controlar como ela é usada ou quem recebe crédito pelo que vem depois.
Mas o instinto parece sólido. Construa as estradas. Torne-as públicas. Deixe as pessoas dirigirem.
O resto se desenrolará em seu próprio ritmo, como sempre acontece.
#ROBO $ROBO