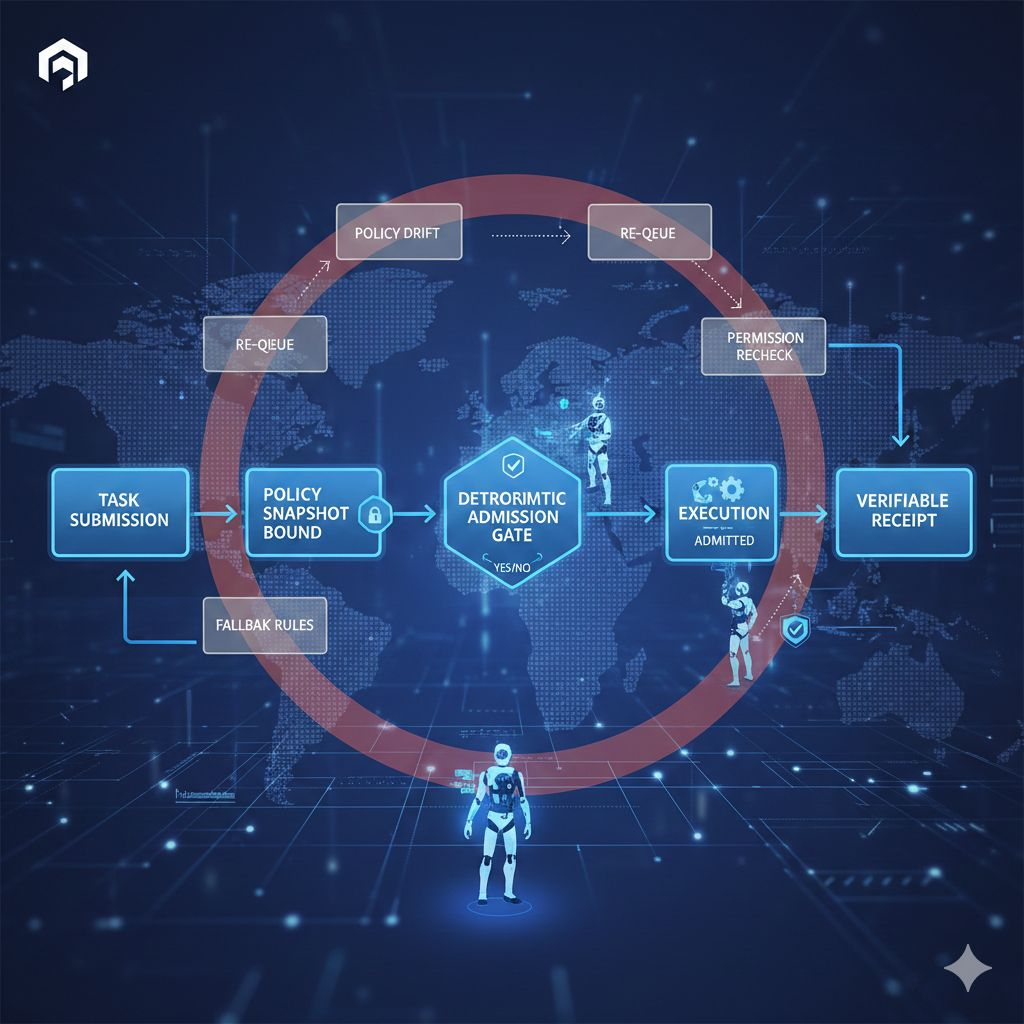
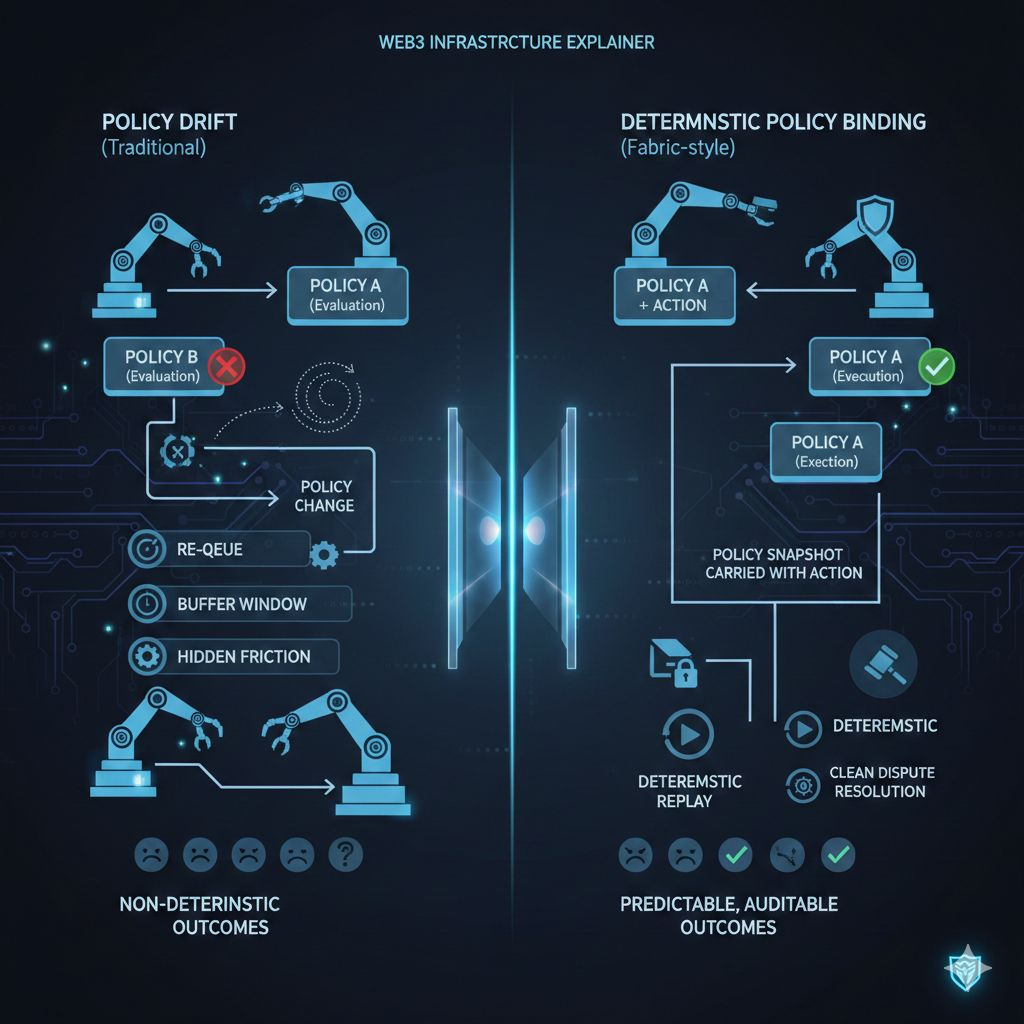
In my opinion, the biggest hidden risk in automation isn’t intelligence — it’s policy drift. I’ve seen systems where tasks don’t fail outright; they simply get re-queued because the policy state changed between evaluation and execution. Nothing crashes, but friction quietly grows. Integrators add buffer windows. Applications re-check permissions. Teams ship fallback rules. Over time, “verified” decisions slowly become operationally stale.@Fabric Foundation
This is where the direction of Fabric Protocol becomes interesting. Instead of treating policy as something referenced after the fact, the idea is to bind policy at evaluation time. That means each claim or action carries the policy snapshot it was judged against. When replay happens, it remains deterministic. Disputes stay clean. There’s proof of which rules were applied at the exact moment of admission.$ROBO
From what I see, this reduces the need for hidden allowlists and trusted intermediaries. If policy binding is done correctly, the gate remains transparent and binary — even under load. Yes, deterministic policy design introduces friction. It forces clearer task boundaries and stricter permissions upfront. But that friction is structural discipline, not inefficiency.
I personally think this is where $ROBO fits naturally within the ecosystem. It operates as alignment capital — supporting receipts, enforcement logic, and admission mechanisms that keep automation single-pass instead of constantly rechecked. When re-queue counters fall and policy rechecks disappear from application layers, that’s when you know the infrastructure is maturing.
Fabric Foundation’s broader vision of open robotics depends on this kind of clarity. If robots and agents are going to collaborate safely at scale, policy cannot be flexible in memory but inconsistent in enforcement. It must be deterministic, verifiable, and bound at the moment of action. That’s not just technical hygiene — it’s foundational architecture for a decentralized robot economy.
$ROBO #ROBO @Fabric Foundation