 Introducere
Introducere
Când am intrat prima dată în contact cu Fabric Protocol și sistemul de operare OM1, prima impresie a fost — acesta este un sistem despre plățile robotilor. Articolele timpurii discutau în principal despre cum roboții pot avea portofele digitale, primi token-uri și obține recompense prin finalizarea sarcinilor. Sună mai mult ca fintech în domeniul automatizării.
Dar după ce am citit în profunzime documentația tehnică, tutorialele pentru dezvoltatori și analizele investitorilor, am realizat treptat: plățile sunt doar un fenomen de suprafață. Scopul mai profund al Fabric și OM1 este de a crea un sistem de memorie partajată pentru mașini.
În această arhitectură, roboții nu mai sunt doar un mediu pentru transmiterea datelor brute de senzori sau instrucțiuni simple, ci generează rapoarte structurate și lizibile, explicând ce au observat, cum au judecat și de ce au luat o anumită acțiune. Fabric este responsabil pentru validarea acestor rapoarte, transformându-le în informații de încredere, astfel încât alți roboți autorizați să le poată citi și utiliza. Această tranziție de la "transmiterea datelor" la "împărtășirea înțelegerii validate" ar putea redefini modul în care este organizată inteligența mașinilor.
De la percepție la gândire structurată: Cum organizează OM1 inteligența mașinilor
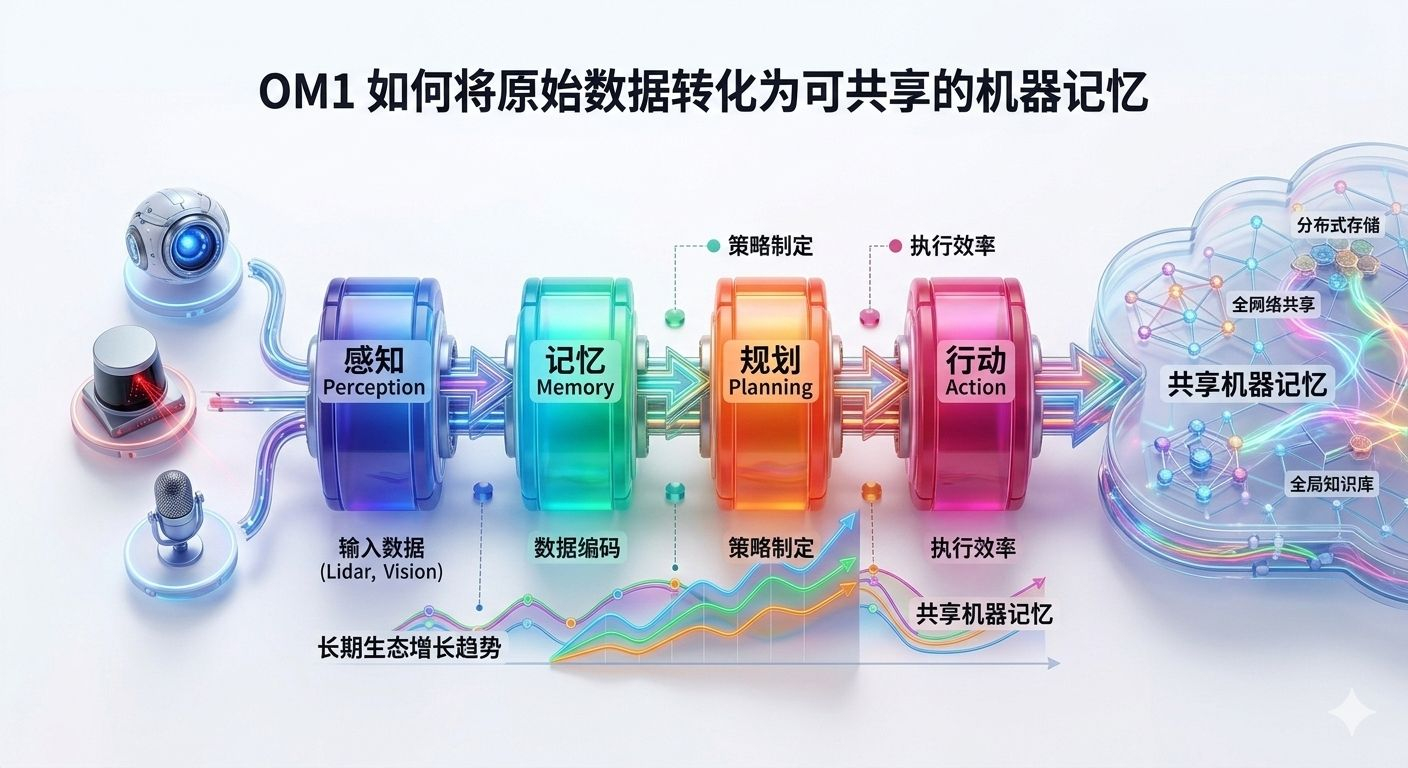
OM1 este adesea denumit "creierul universal al roboților", dar în practică, este mai mult un cadru de traducere a cognitivului robotizat. Arhitectura sa modularizează funcțiile de bază, de obicei implementate în Python, incluzând:
Percepție (Perception)
Memorie (Memory)
Planificare (Planning)
Acțiune (Action)
Fluxul de operare este în linii mari următorul:
Modulul de percepție primește date de la camere, lidar sau rețele;
Modulul de memorie transformă datele în informații structurate;
Modulul de planificare generează strategii de nivel înalt;
Modulul de acțiune execută deciziile.
Particularitatea OM1 constă în utilizarea unei magistrale de date asemănătoare limbajului. Starea internă a sistemului și deciziile nu există sub forma unor array-uri numerice greu de înțeles, ci sunt exprimate prin text structurat. Această proiectare face ca sistemul să fie mai ușor de depanat, extins și mai accesibil pentru partajarea informațiilor între roboți.
Dezvoltatorii pot testa prin simulatorul browserului WebSim, OM1 poate fi integrat și cu platforme de simulare precum Gazebo pentru a valida comportamentul roboților în medii virtuale, înainte de a le implementa în lumea reală. Roboții virtuali și cei reali folosesc același limbaj de nivel înalt pentru descriere, creând un efect similar cu "gemeni digitali".
Sensul său central este că roboții nu doar execută acțiuni, ci pot explica logica deciziilor lor, permițând altor sisteme să înțeleagă și să evalueze comportamentul lor.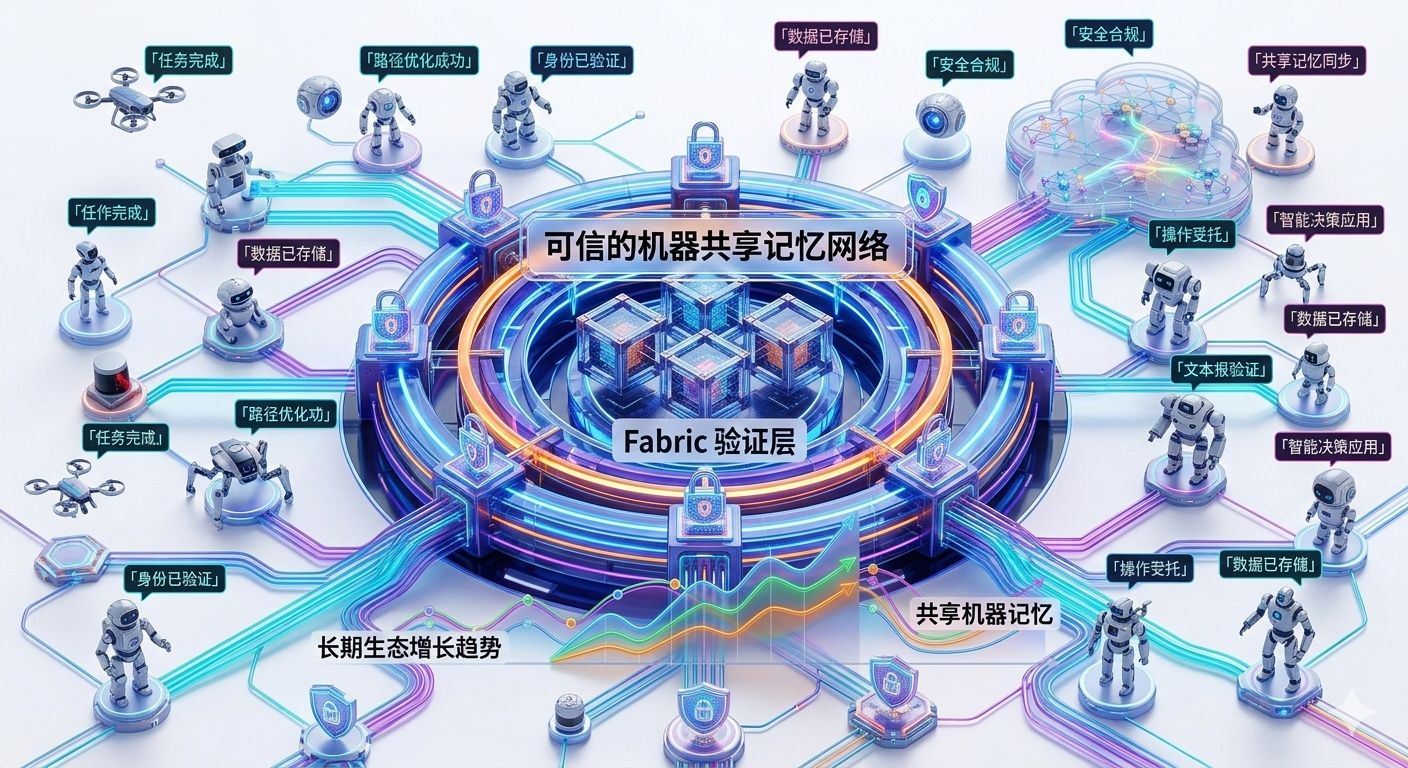
Stratul de validare al Fabric: face cunoștințele partajate de încredere
Sistemele robotizate actuale împărtășesc adesea doar datele de bază, cum ar fi hărți sau semnale de control, dar încrederea depinde adesea de managementul centralizat sau de ipoteze implicite.
Fabric adaugă o strat suplimentar de mecanisme de verificare. Roboții pot valida informațiile pe care le primesc de la alte mașini înainte de a le accepta:
Identitatea expeditorului
Locația evenimentului
Dovada finalizării sarcinii
Autenticitatea semnăturii criptografice
Fabric este mai degrabă o rețea socială sigură între mașini. Când roboții finalizează o sarcină sau dobândesc noi abilități, generează rapoarte structurate însoțite de dovezi criptografice. Alți roboți pot interoga registrul pentru a confirma sursa și autenticitatea informației.
De exemplu, într-un depozit, un robot descoperă o cale mai eficientă. În modelul tradițional, această optimizare ar putea exista doar în interiorul unui singur sistem. Însă prin Fabric, această cale și dovada succesului ei pot fi publicate în registrul partajat, iar alți roboți pot descărca și utiliza.
Ceea ce rezultă este un "Wikipedia robotizată" în continuă acumulare - un sistem de memorie colectivă care crește în timp.
Cunoștințele ca active: posibilitățile pieței de capital pentru mașini
Dacă cunoștințele generate de mașini pot fi verificate și împărtășite, ele ar putea avea valoare economică.
Unele opinii de investiții consideră că Fabric poate sprijini formarea pieței de cunoștințe. În acest model:
Roboții generează cunoștințe valoroase (de exemplu, hărți de mare precizie sau strategii de prindere optimizate);
Această cunoștință este standardizată și tokenizată;
Alți roboți sau dezvoltatori pot cumpăra sau folosi.
Spre deosebire de tokenurile ecologice universale, aceste tokenuri de cunoștințe reprezintă informații specifice și validate. Valoarea acestora poate depinde de utilitate, noutate sau raritate.
Aceasta înseamnă că economia robotizată ar putea trece de la hardware la un model centrat pe activele de cunoștințe. Roboții care oferă în mod constant informații de înaltă calitate ar putea avea o valoare economică mai mare decât roboții care execută sarcini repetitive.
Dar acest lucru aduce și probleme noi:
Cine deține datele generate de roboți?
Cum se poate evalua obiectiv calitatea cunoștințelor?
Vor acumula mari companii cunoștințe pentru a forma monopoluri?
Aceste probleme depășesc cadrul tradițional de discuții privind licențele open-source.
Compromisurile și provocările memoriei partajate
Construirea unui sistem de memorie partajată pentru mașini nu vine fără costuri.
Primul, costul calculat.
O cantitate mare de roboți care publică și validează actualizări în mod continuu va crește încărcătura registrela, ceea ce ar putea afecta eficiența colaborării în timp real.
Al doilea, riscurile de confidențialitate.
Rapoartele detaliate ale activităților ar putea expune informații de mediu, iar lipsa mecanismelor de filtrare și criptare ar putea duce la probleme de supraveghere și conformitate.
Al treilea, fragmentarea standardelor.
Valoarea memoriei partajate depinde de efectele de scară. Dacă furnizorii adoptă standarde diferite, sistemul ar putea fi împărțit în mai multe "rețele de memorie" incompatibile.
În plus, sunt implicate și consumul de energie, politicile de reglementare și factorii reali de securitate cibernetică.
Succesul sistemului depinde de echilibrul dintre încredere și implicare: o implicare mare, dar o verificare slabă, va duce la distorsionarea informației; o verificare strictă, dar o implicare scăzută, va limita valoarea rețelei.
Concluzie
Atunci când ne mutăm perspectiva de la "tokenuri și plăți" la "fluxul de cunoștințe", Fabric și OM1 prezintă un sens complet diferit. Adevărata inovație nu constă în capacitatea roboților de a fi plătiți, ci în abilitatea lor de a-și înregistra observațiile și deciziile într-o manieră inteligibilă și de a le stoca în memorie partajată.
OM1 permite mașinilor să-și exprime procesul de gândire; Fabric asigură că aceste exprimări sunt de încredere. Combinarea celor două conturează un viitor - economia robotizată nu se bazează doar pe hardware și tranzacții financiare, ci se bazează pe o memorie de mașină verificabilă.
Această viziune a adus probleme complexe legate de proprietate, confidențialitate și reglementare, dar a deschis și niveluri mai înalte de colaborare, adaptabilitate și transparență.
Privind din această perspectivă, Fabric și OM1 nu sunt doar infrastructuri de plată, ci o încercare de a construi o "conștiință colectivă" pentru mașini.
#ROBO @Fabric Foundation $ROBO
