Salut, bună seara, prieteni, Alfa Aalim aici.
Astăzi vreau să împărtășesc o poveste simplă cu toți voi. Noaptea trecută am fost profund implicat în cercetări legate de robotică și infrastructura crypto. Atâtea proiecte astăzi discută despre viitorul roboților și Inteligența Artificială. Oriunde te întorci, auzi aceeași narațiune despre mașini mai inteligente, sisteme automatizate și o lume în care roboții se ocupă de munca grea.
Dar noaptea trecută o întrebare specifică mi-a tot răscolit mintea și, sincer, această întrebare este chiar mai interesantă decât roboții în sine. Dacă un robot finalizează o sarcină, cum știe de fapt rețeaua că munca a fost cu adevărat realizată?
Gândiți-vă la asta. Dacă un sistem recompensează roboții pentru munca lor, prima provocare majoră este frauda. Orice mașină ar putea trimite date false. Cineva ar putea reintroduce un vechi record de activitate. Un dispozitiv ar putea raporta că a finalizat o sarcină când, de fapt, nu a făcut nimic deloc. În momentul în care recompensele economice intră în sistem, problema verificării devine urgentă.
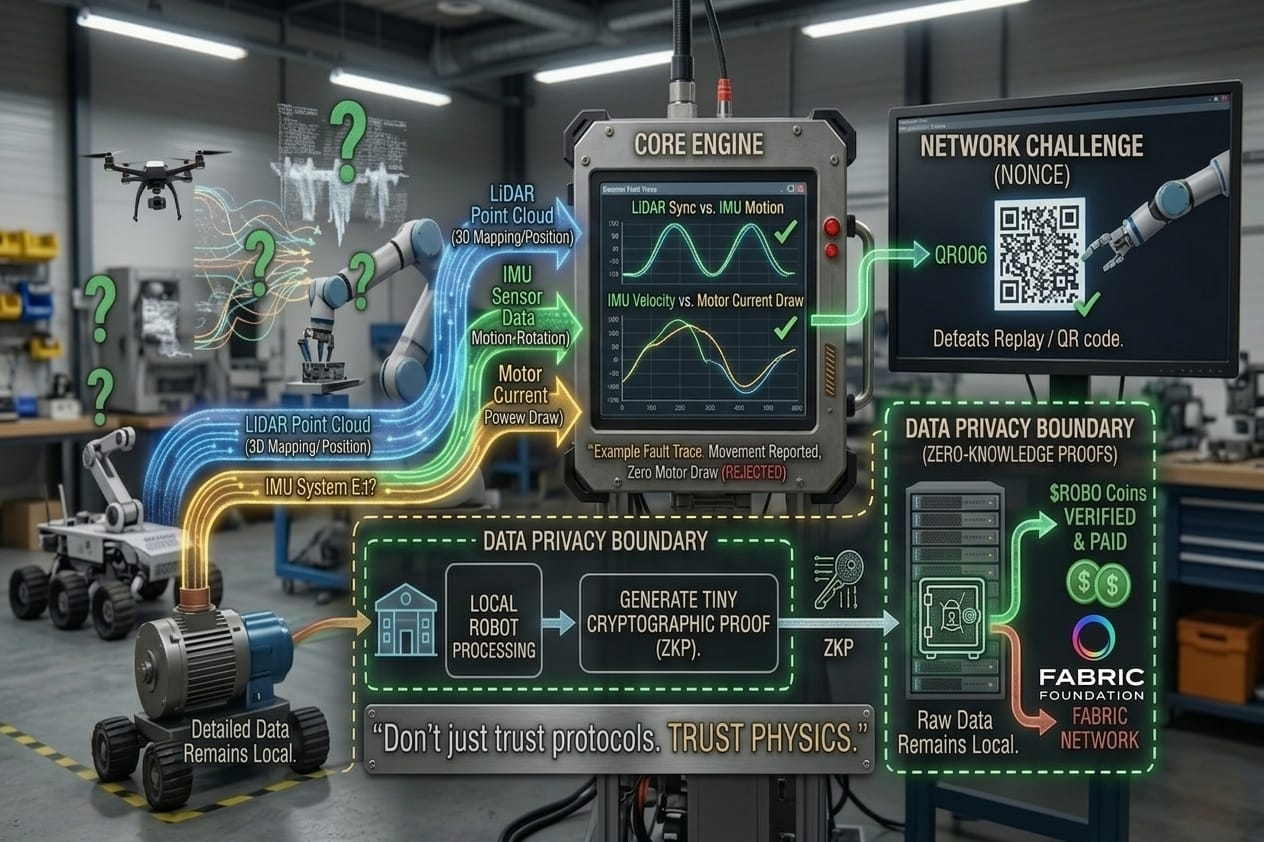
Aici este locul unde am găsit abordarea Fundației Fabric să fie destul de diferită. Aici, ideea nu este doar despre construirea de roboți. Accentul este pe infrastructura care poate verifica munca unei mașini. Conceptul din spatele Fundației Fabric este simplu, dar puternic. Atunci când un robot operează în lumea reală, nu produce doar un singur semnal digital. Generează multiple semnale fizice în același timp.
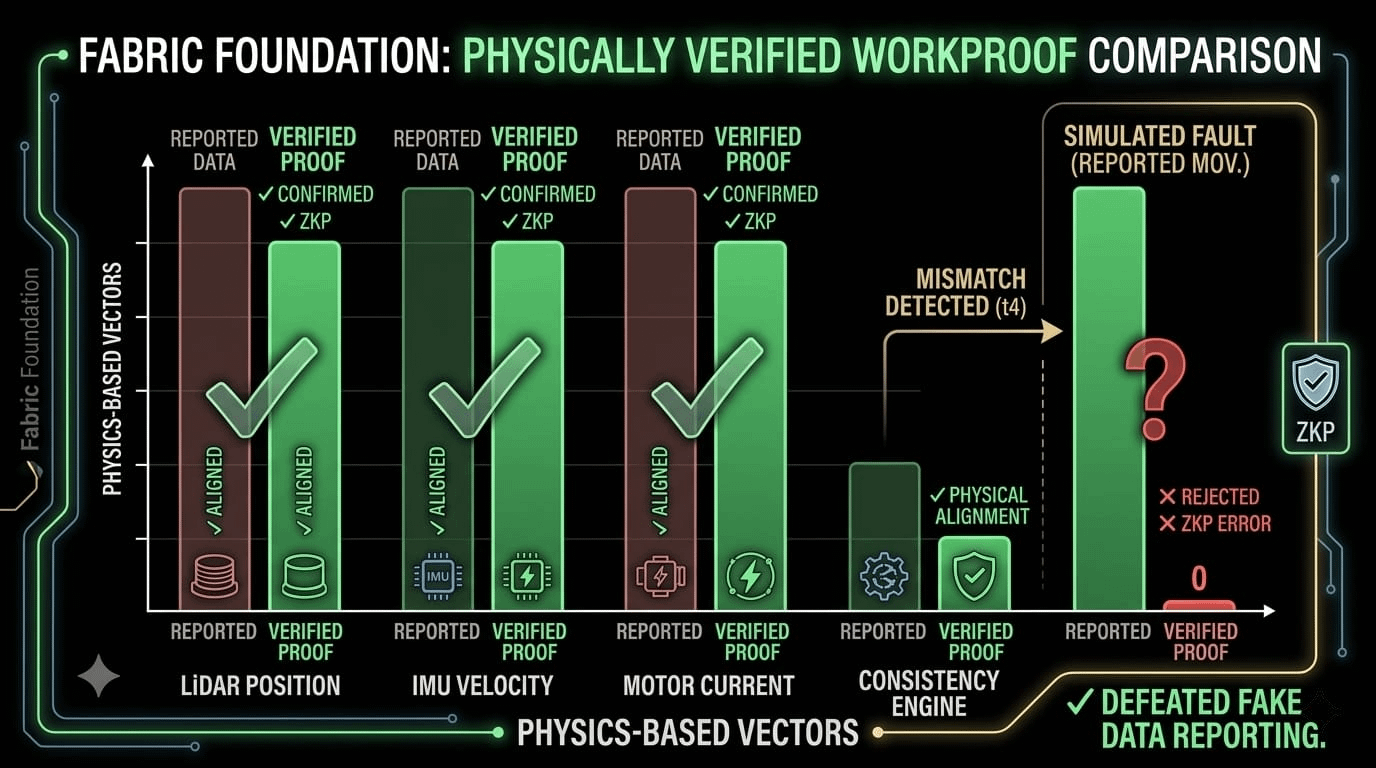
Senzorii LiDAR cartografiază mediul. Senzorii IMU urmăresc mișcarea și rotația. Consumul de energie electrică de la motoare este înregistrat pe măsură ce mașina se deplasează.
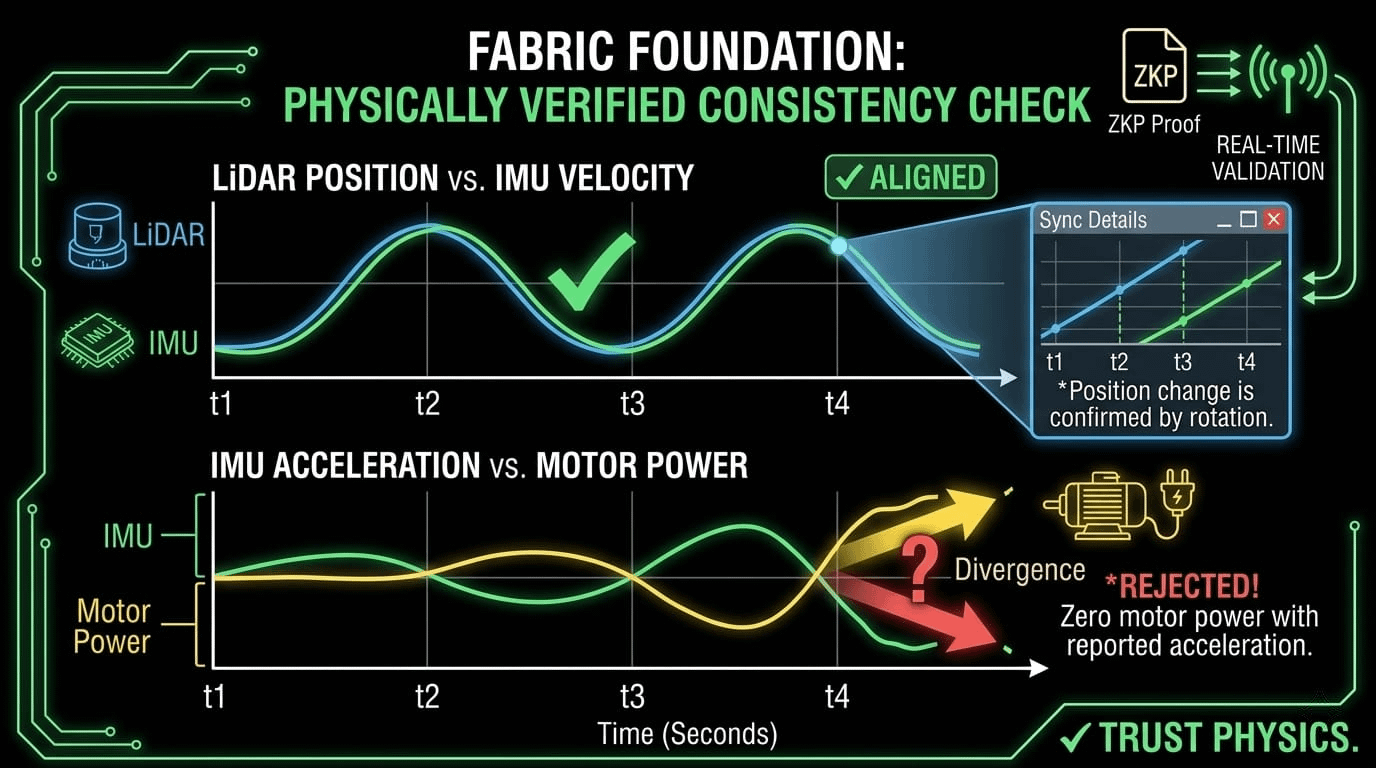
Acum, dacă un robot pretinde că s-a mișcat, dar consumul de energie al motorului rămâne zero, sistemul marchează imediat datele ca fiind inconsistent. Dacă un robot încearcă să reintroducă înregistrări vechi, rețeaua poate emite o provocare în timp real pe care datele vechi statice nu o pot rezolva. În acest ecosistem, verificarea nu depinde doar de un jurnal software. Fizica însăși devine parte a sistemului de verificare.
Un alt aspect fascinant al Fundației Fabric implică confidențialitatea. Datele senzorilor robotici pot fi extrem de sensibile, conținând detalii precum planuri de clădiri sau spații interioare. Din acest motiv, datele brute ale senzorilor nu sunt niciodată publicate direct pe blockchain.
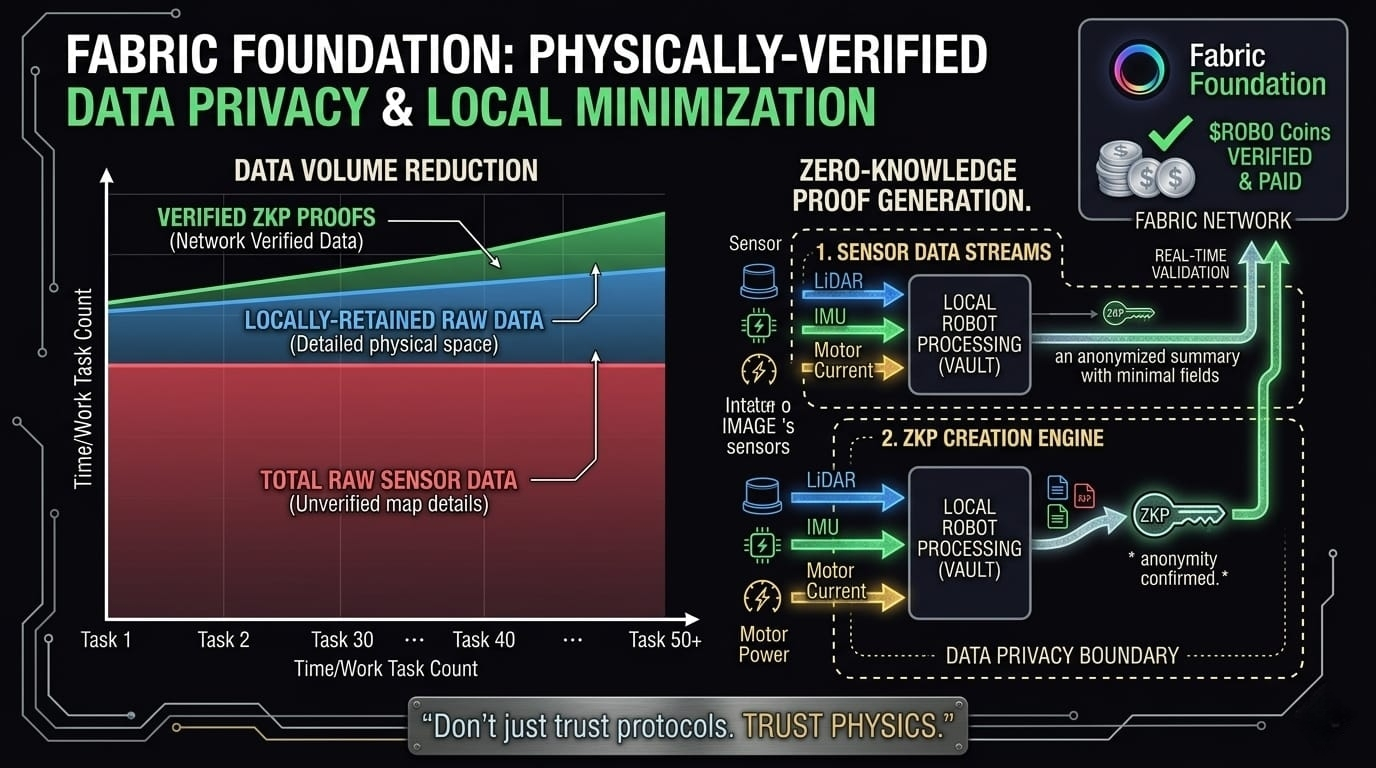
În schimb, robotul procesează datele local pe dispozitiv și generează o dovadă criptografică. Rețeaua primește doar dovada că munca a fost efectuată fără a expune datele brute.
În timp ce cercetam, un punct mi s-a părut deosebit de profund. În lumea crypto, de obicei vorbim despre încrederea în protocoale. Dar Fundația Fabric sugerează altceva. Nu doar încredeți în protocol. Încredeți-vă în fizică.
Dacă semnalele fizice se aliniază și se validează reciproc, sistemul are dovezi că mașina a efectuat muncă în lumea fizică. Pe măsură ce roboții descentralizați încep să livreze bunuri, să inspecteze infrastructura sau să colecteze date, aceste sisteme de verificare pot deveni esențiale. Aici ecosistemul devine interesant pentru că mașinile trebuie mai întâi să-și dovedească munca înainte de a participa într-o rețea economică.
Aceste idei sunt încă în evoluție, iar desfășurările în lumea reală vor fi adevăratul test al cât de puternice sunt aceste sisteme. Dar un lucru pare deja clar. Economia viitoare a roboților nu va depinde doar de mașini, ci și de infrastructura de verificare din spatele lor.
Și de aceea spun adesea că, uneori, cea mai importantă tehnologie este cea care nu se află în lumina reflectoarelor.
#robo $ROBO @Fabric Foundation
Acest articol este doar pentru scopuri informative.