Autor: 0xjacobzhao | https://linktr.ee/0xjacobzhao
Acest raport de cercetare independent este susținut de IOSG Ventures. Autorul mulțumește lui Hans (RoboCup Asia-Pacific), Nichanan Kesonpat(1kx), Robert Koschig (1kx), Amanda Young (Collab+Currency), Jonathan Victor (Ansa Research), Lex Sokolin (Generative Ventures), Jay Yu (Pantera Capital), Jeffrey Hu (Hashkey Capital) pentru comentariile lor valoroase, precum și contribuțiilor din OpenMind, BitRobot, peaq, Auki Labs, XMAQUINA, GAIB, Vader, Gradient, Tashi Network și CodecFlow pentru feedback-ul lor constructiv. Deși s-au depus toate eforturile pentru a asigura obiectivitatea și acuratețea, unele perspective reflectă inevitabil interpretări subiective, iar cititorii sunt încurajați să interacționeze cu conținutul într-un mod critic.
I. Robotică: De la automatizarea industrială la inteligența umanoidă
Industria robotică tradițională a dezvoltat un lanț valoric integrat vertical, cuprinzând patru straturi principale: componente de bază, sisteme de control, mașini complete și integrare și aplicații de sistem.
Componentele de bază (controlere, servomotoare, reductoare, senzori, baterii etc.) au cele mai mari bariere tehnice, definind atât plafoane de performanță, cât și praguri de cost.
Sistemele de control acționează ca „creierul și cerebelul” robotului, responsabile de luarea deciziilor și planificarea mișcării.
Fabricația completă de mașini reflectă capacitatea de a integra lanțuri de aprovizionare complexe.
Integrarea sistemelor și dezvoltarea aplicațiilor determină profunzimea comercializării și devin surse cheie de creare de valoare.
La nivel global, robotica evoluează de-a lungul unei traiectorii clare — de la automatizare industrială → inteligență specifică scenariului → inteligență de uz general — formând cinci categorii majore: roboți industriali, roboți mobili, roboți de serviciu, roboți cu uz special și roboți umanoizi.
Roboți industriali:În prezent, singurul segment complet matur, roboții industriali sunt utilizați pe scară largă în procesele de sudare, asamblare, vopsire și manipulare pe toate liniile de fabricație. Industria se caracterizează prin lanțuri de aprovizionare standardizate, marje stabile și un ROI bine definit. În cadrul acestei categorii,roboți colaborativi (coboți)—conceput pentru colaborare om-robot în siguranță, funcționare ușoară și implementare rapidă.
Companii reprezentative:ABB, Fanuc, Yaskawa, KUKA, Universal Robots, JAKA și AUBORoboți mobili:InclusivAGV (Vehicule cu Ghidare Automată)șiAMR (Roboți Mobili Autonomi), această categorie este adoptată pe scară largă în logistică, îndeplinirea comenzilor online și transportul în fabrici. Este segmentul cel mai matur pentru aplicațiile B2B.
Companii reprezentative:Amazon Robotics, Geek+, Quicktron, Locus Robotics.Roboți de serviciu: Vizează sectoarele de consum și comerciale - cum ar fi curățenia, serviciile alimentare și educația - aceasta este categoria cu cea mai rapidă creștere din partea consumatorilor. Roboții de curățenie urmează acum o logică a electronicelor de larg consum, în timp ce roboții medicali și de livrare se comercializează rapid. Apare un nou val de manipulatori mai generali (de exemplu, sisteme cu două brațe precum Dyna) - mai flexibili decât produsele specifice sarcinilor, dar nu la fel de generali ca umanoizii.
Companii reprezentative: Ecovacs, Roborock, Pudu Robotics, KEENON Robotics, iRobot, Dyna.
Roboți cu scop special: Concepuți pentru aplicații cu risc ridicat sau de nișă - sănătate, armată, construcții, marină și aerospațială - acești roboți deservesc piețe mici, dar profitabile, cu bariere puternice la intrare, bazându-se de obicei pe contracte guvernamentale sau de întreprinderi.
Companii reprezentative: Intuitive Surgical, Boston Dynamics, ANYbotics, NASA Valkyrie, Honeybee RoboticsRoboți umanoizi: Considerați viitoarea „platformă universală de muncă”, roboții umanoizi atrag cea mai mare atenție la frontiera inteligenței întrupate.
Companii reprezentative: Tesla (Optimus), Figure AI (Figura 01), Sanctuary AI (Phoenix), Agility Robotics (Digit), Apptronik (Apollo), 1X Robotics, Neura Robotics, Unitree, UBTECH, Agibot
Valoarea fundamentală a roboților umanoizi constă în morfologia lor asemănătoare omului, permițându-le să opereze în medii sociale și fizice existente fără modificări ale infrastructurii. Spre deosebire de roboții industriali care urmăresc eficiența maximă, umanoizii pun accent pe adaptabilitatea generală și transferabilitatea sarcinilor, permițând o implementare fără probleme în fabrici, locuințe și spații publice.
Majoritatea roboților umanoizi sunt încă în stadiul de demonstrație tehnică, concentrați pe validarea echilibrului dinamic, a locomoției și a capacităților de manipulare. Deși au început să apară implementări limitate în medii de fabrică extrem de controlate (de exemplu, Figure × BMW, Agility Digit) și se așteaptă ca alți furnizori, cum ar fi 1X, să intre în distribuție timpurie începând cu 2026, acestea sunt încă aplicații cu scop restrâns, cu o singură sarcină - nu o integrare reală a forței de muncă cu scop general. O comercializare semnificativă la scară largă este încă la ani distanță.
Blocajele principale se întind pe mai multe straturi:
Coordonarea multi-DOF și echilibrul dinamic în timp real rămân dificile;
Energia și rezistența sunt limitate de densitatea bateriei și de eficiența actuatorului;
Canalele percepție-decizie se destabilizează adesea în mediile deschise și nu reușesc să generalizeze;
O lacună semnificativă în date limitează antrenamentul politicilor generalizate;
Transferul de încorporare încrucișată nu este încă rezolvat;
Lanțurile de aprovizionare cu hardware și curbele de cost - în special în afara Chinei - rămân bariere substanțiale, ceea ce face dificilă implementarea la scară largă și cu costuri reduse.
Comercializarea roboticii umanoide va avansa în trei etape: Demo-as-a-Service pe termen scurt, impulsionată de proiecte pilot și subvenții; Robotică-as-a-Service (RaaS) pe termen mediu, pe măsură ce apar ecosisteme de sarcini și competențe; și un model Labor Cloud pe termen lung, unde valoarea se schimbă de la hardware la software și servicii în rețea. Per total, robotica umanoidă intră într-o tranziție esențială de la demonstrație la auto-învățare. Dacă industria poate depăși barierele interconectate ale controlului, costului și inteligenței va determina dacă inteligența întrupată poate deveni cu adevărat o forță economică scalabilă.
II. IA × Robotică: Zorii erei inteligenței întrupate
Automatizarea tradițională se bazează în mare măsură pe logică preprogramată și arhitecturi de control bazate pe conducte - cum ar fi paradigma DSOP (percepție-planificare-control) - care funcționează fiabil doar în medii structurate. Lumea reală, însă, este mult mai complexă și imprevizibilă. Noua generație de IA întrupată urmează o paradigmă complet diferită: valorificarea modelelor mari și a învățării reprezentării unificate pentru a oferi roboților capacități inter-scene pentru înțelegere, predicție și acțiune. Inteligența întrupată pune accentul pe cuplarea dinamică dintre corp (hardware), creier (modele) și mediu (interacțiune). Robotul este doar vehiculul - inteligența este adevăratul nucleu.
IA generativă reprezintă inteligența în lumea simbolică și lingvistică - excelează în înțelegerea limbajului și a semanticii. IA întrupată, prin contrast, reprezintă inteligența în lumea fizică - stăpânește percepția și acțiunea. Cele două corespund „creierului” și „corpului” evoluției IA, formând două frontiere paralele, dar convergente.
Din perspectiva ierarhiei inteligenței, IA întrupată este o capacitate de ordin superior față de IA generativă, dar maturitatea sa este mult în urmă. Maeștrii LLM beneficiază de date abundente la scară internet și de o buclă bine definită de tip „date → calcul → implementare”. Cu toate acestea, inteligența robotică necesită date egocentrice, multimodale, bazate pe acțiune - traiectorii de teleoperare, videoclipuri la persoana întâi, hărți spațiale, secvențe de manipulare - care nu există în mod implicit și trebuie generate prin interacțiune în lumea reală sau prin simulare de înaltă fidelitate. Acest lucru face ca datele să fie mult mai rare, mai costisitoare și mai greu de scalat. Deși datele simulate și sintetice ajută, ele nu pot înlocui complet experiența senzoriomotorie reală. Acesta este motivul pentru care companii precum Tesla și Figure trebuie să opereze fabrici de teleoperare și de ce au apărut ferme de colectare a datelor în SEA. Pe scurt, maeștrii LLM învață din datele existente; roboții trebuie să-și creeze propriile date prin interacțiune fizică.
În următorii 5-10 ani, ambele vor converge profund prin modelele Viziune-Limbaj-Acțiune (VLA) și arhitecturile Agentului Întrupat - LLM-urile vor gestiona cogniția și planificarea la nivel înalt, în timp ce roboții vor executa acțiuni din lumea reală, formând o buclă bidirecțională între date și întruchipare, propulsând astfel IA de la inteligența lingvistică către o adevărată inteligență generală (AGI).
Tehnologia de bază a inteligenței întrupate
IA întrupată poate fi conceptualizată ca o stivă de inteligență ascendentă, care cuprinde:
VLA (Fuziunea Percepției), RL/IL/SSL (Învățare), Sim2Real (Transferul Realității), Modelul Lumii (Modelare Cognitivă) și Swarm & Reasoning (Inteligență Colectivă și Memorie).
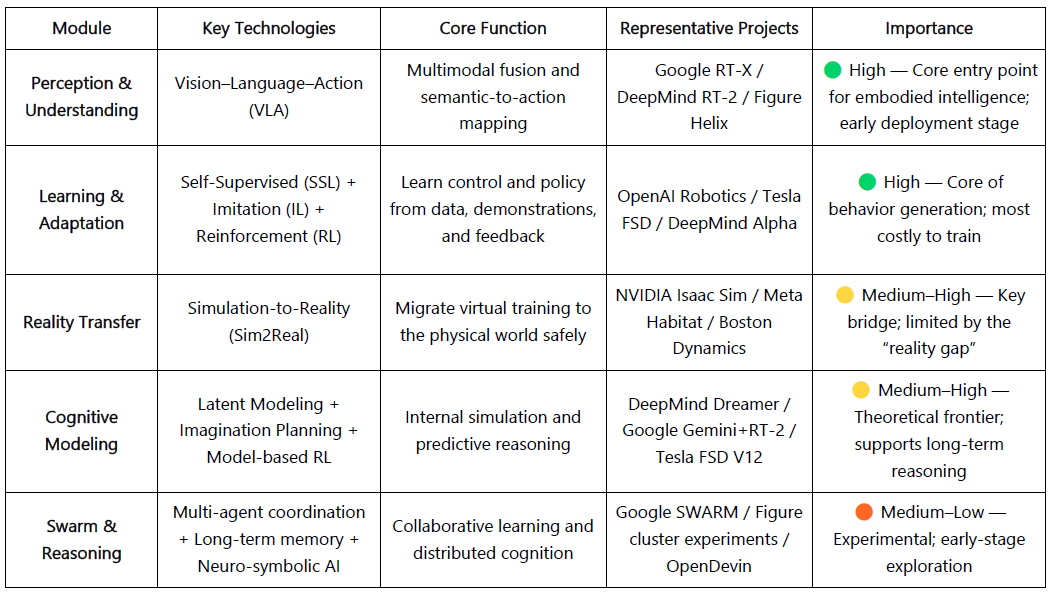
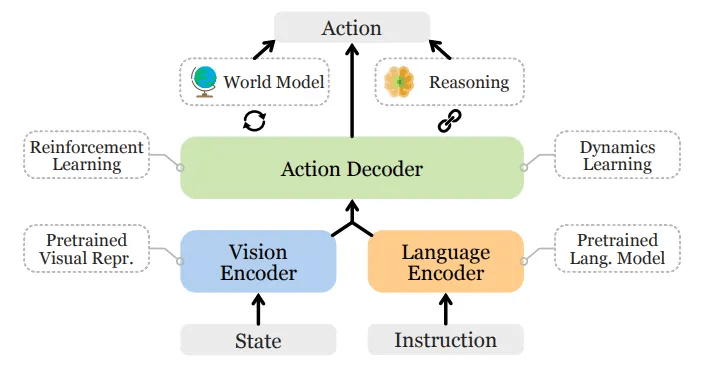
Percepție și înțelegere: Viziune-limbaj-acțiune (VLA)
Modelul VLA integrează Viziunea, Limbajul și Acțiunea într-un sistem multimodal unificat, permițând roboților să înțeleagă instrucțiunile umane și să le traducă în operații fizice. Canalul de execuție include analiza semantică, detectarea obiectelor, planificarea traseului și execuția acțiunilor, completând bucla completă „înțelegerea semanticii → perceperea lumii → finalizarea sarcinii”. Proiecte reprezentative: Google RT-X, Meta Ego-Exo și Figure Helix, care prezintă inovații în înțelegerea multimodală, percepția imersivă și controlul condiționat de limbaj.
Sistemele VLA sunt încă într-un stadiu incipient și se confruntă cu patru blocaje fundamentale:
Ambiguitate semantică și generalizare slabă a sarcinii: modelele au dificultăți în interpretarea instrucțiunilor vagi sau deschise;
Aliniere instabilă viziune-acțiune: erorile de percepție sunt amplificate în timpul planificării și execuției;
Date multimodale rare și nestandardizate: colectarea și adnotarea rămân costisitoare, ceea ce face dificilă construirea de sisteme de date la scară largă;
Provocări la orizonturi lungi pe axele temporale și spațiale: orizonturile temporale lungi solicită planificarea și memoria, în timp ce orizonturile spațiale mari necesită raționament despre elemente în afara percepției - lucru care lipsește în prezent în VLA-uri din cauza modelelor limitate ale lumii și a inferenței interspațiale.
Aceste probleme, împreună, constrâng generalizarea VLA pe mai multe scenarii și îi limitează disponibilitatea pentru implementarea la scară largă în lumea reală.
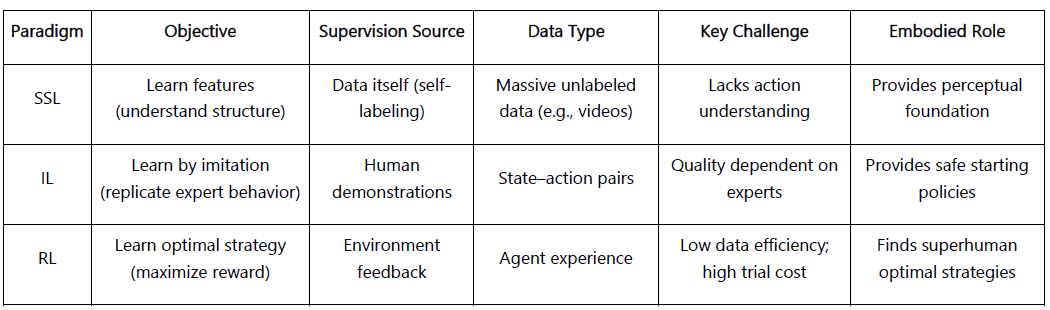
Învățare și adaptare: SSL, IL și RL
Învățare autosupervizată (SSL): Permite roboților să deducă modele și legi fizice direct din datele perceptive - învățându-i să „înțeleagă lumea”.
Învățare prin imitație (IL): Permite roboților să imite demonstrații umane sau ale experților, ajutându-i să „se comporte ca oamenii”.
Învățare prin întărire (RL): Folosește bucle de feedback recompensă-pedeapsă pentru a optimiza politicile, ajutându-le să „învețe prin încercări și erori”.
În IA întrupată, aceste paradigme formează un sistem de învățare stratificat: SSL oferă o bază reprezentațională, IL oferă priorități umane, iar RL conduce la optimizarea politicilor.
formând împreună mecanismul central al învățării de la percepție la acțiune.
Sim2Real: Legătură între simulare și realitate
Simularea la realitate (Sim2Real) permite roboților să se antreneze în medii virtuale înainte de implementarea în lumea reală. Platforme precum NVIDIA Isaac Sim, Omniverse și DeepMind MuJoCo produc cantități uriașe de date sintetice, reducând costurile și uzura hardware-ului.
Scopul este de a minimiza „decalajul față de realitate” prin:
Randomizare a domeniilor: Modificarea aleatorie a iluminării, frecării și zgomotului pentru a îmbunătăți generalizarea.
Calibrare fizică: Utilizarea datelor senzoriale reale pentru a ajusta fizica simulării pentru realism.
Reglare fină adaptivă: Reantrenare rapidă la fața locului pentru stabilitate în medii reale.
Sim2Real formează puntea centrală pentru implementarea IA întrupată. În ciuda progreselor semnificative, rămân provocări legate de decalajul dintre realitate, costurile de calcul și siguranța în lumea reală. Cu toate acestea, Simularea ca serviciu (SimaaS) se impune ca o infrastructură ușoară, dar strategică, pentru era IA întrupată - prin intermediul modelelor de afaceri PaaS (abonament la platformă), DaaS (generare de date) și VaaS (validare).
Modelare cognitivă: Modelul lumii — „Lumea interioară” a robotului
Un Model Mondial servește drept creier intern al roboților, permițându-le să simuleze medii și rezultate intern - anticipând și raționând înainte de a acționa. Prin învățarea dinamicii mediului, acesta permite un comportament predictiv și proactiv. Proiecte reprezentative: DeepMind Dreamer, Google Gemini + RT-2, Tesla FSD V12, NVIDIA WorldSim.
Tehnicile de bază includ:
Modelarea dinamicii latente: Comprimarea observațiilor de înaltă dimensiune în stări latente.
Planificare bazată pe imaginație: încercări virtuale și erori pentru prezicerea traiectoriei.
Învățare prin consolidare bazată pe modele: Înlocuirea încercărilor din lumea reală cu simulări interne.
Modelele mondiale marchează tranziția de la inteligența reactivă la cea predictivă, deși persistă provocări în ceea ce privește complexitatea modelului, stabilitatea pe orizont lung și standardizarea.
Inteligența și raționamentul în roi: de la cunoașterea individuală la cea colectivă
Colaborarea multi-agenți și sistemele de raționament bazate pe memorie reprezintă următoarea frontieră - extinderea inteligenței de la agenți individuali la colective cooperative și cognitive.
Sisteme multi-agent (MAS): Permit cooperarea distribuită între mai mulți roboți prin intermediul unor framework-uri cooperative de învățare a roboților (de exemplu, OpenAI Hidden-and-Seek, DeepMind QMIX / MADDPG). Acestea s-au dovedit eficiente în logistică, inspecție și control coordonat al roiurilor.
Memorie și raționament: Dotați agenții cu memorie pe termen lung și înțelegere cauzală - crucială pentru generalizarea și autoplanificarea sarcinilor. Exemplele de cercetare includ DeepMind Gato, Dreamer și Voyager, care permit învățarea continuă și „amintirea trecutului, simularea viitorului”.
Împreună, aceste componente pun bazele unor roboți capabili de învățare colectivă, memorie și auto-evoluție.
Peisajul global al inteligenței artificiale întruchipate: colaborare și competiție
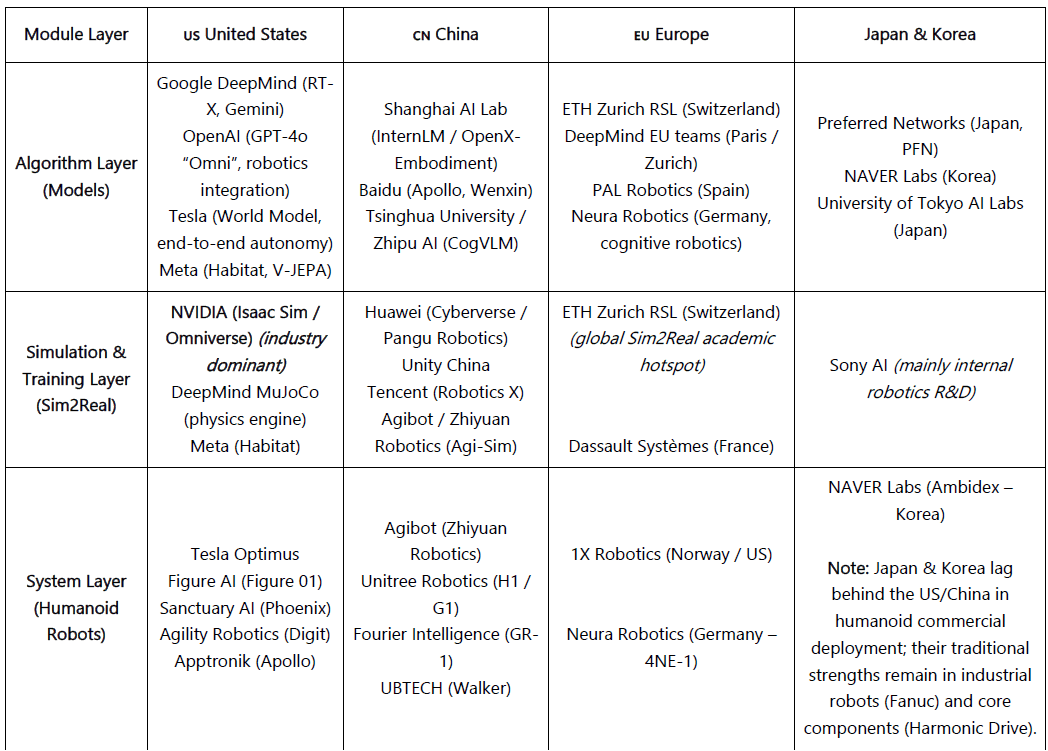
Industria globală a roboticii intră într-o eră a concurenței cooperative.
China este lider în eficiența lanțului de aprovizionare, în producție și în integrarea verticală, companii precum Unitree și UBTECH producând deja în masă umanoizi. Cu toate acestea, capacitățile sale algoritmice și de simulare sunt încă în urma SUA cu câțiva ani.
SUA domină modelele și software-ul de inteligență artificială de frontieră (DeepMind, OpenAI, NVIDIA), însă acest avantaj nu se extinde pe deplin la hardware-ul robotic - unde jucătorii chinezi iterează adesea mai rapid și demonstrează performanțe mai bune în lumea reală. Această diferență în hardware explică parțial eforturile de relocalizare industrială ale SUA în cadrul Legii CHIPS și IRA.
Japonia rămâne liderul mondial în componente de precizie și sisteme de control al mișcării, deși progresul său în robotica bazată pe inteligență artificială rămâne conservator.
Coreea se distinge prin adoptarea roboticii avansate de către consumatori, impulsionată de LG, NAVER Labs și un ecosistem matur de roboți de servicii.
Europa menține o cultură inginerească puternică, standarde de siguranță și o cercetare aprofundată; deși o mare parte din producția a fost mutată în străinătate, Europa continuă să exceleze în cadrele de colaborare și standardizarea roboticii.
Împreună, aceste puncte forte regionale modelează echilibrul pe termen lung al industriei globale a inteligenței întruchipate.
III. Roboți × IA × Web3: Viziune narativă vs. Căi practice
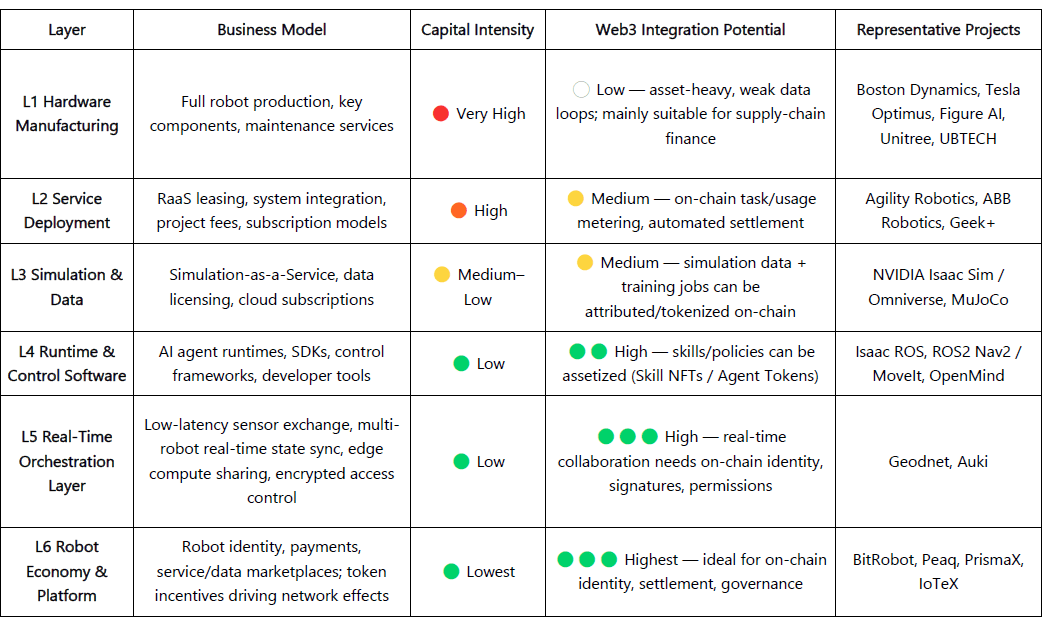
În 2025, o nouă narațiune a apărut în Web3 în jurul fuziunii dintre robotică și inteligență artificială. Deși Web3 este adesea prezentat ca protocolul de bază pentru o economie descentralizată a mașinilor, valoarea sa reală de integrare și fezabilitatea variază semnificativ în funcție de strat:
Nivelul de producție și servicii hardware: Intensiv de capital, cu volante de date slabe; Web3 poate juca în prezent doar un rol de sprijin în cazuri limită, cum ar fi finanțarea lanțului de aprovizionare sau leasingul de echipamente.
Ecosistem de simulare și software: Compatibilitate sporită; datele de simulare și joburile de instruire pot fi plasate on-chain pentru atribuire, iar agenții/modulele de competențe pot fi activate prin NFT-uri sau token-uri de agent.
Nivelul platformei: Rețelele descentralizate de muncă și colaborare prezintă cel mai mare potențial - Web3 poate uni identitatea, stimulentele și guvernanța pentru a construi treptat o „piață a muncii automată” credibilă, punând bazele instituționale pentru o economie automată viitoare.
Viziune pe termen lung. Nivelul de Orchestrare și Platformă este cea mai valoroasă direcție pentru integrarea Web3 cu robotica și inteligența artificială. Pe măsură ce roboții dobândesc percepție, limbaj și capacități de învățare, aceștia evoluează în actori inteligenți care pot decide, colabora și crea valoare economică în mod autonom. Pentru ca acești „muncitori inteligenți” să participe cu adevărat la economie, trebuie depășite patru obstacole principale: identitatea, încrederea, stimulentele și guvernanța.
Identitate: Mașinile necesită identități digitale atribuibile și trasabile. Cu ajutorul DID-urilor pentru mașini, fiecare robot, senzor sau dronă poate crea un „card de identitate” unic și verificabil în lanț, stabilind proprietatea, jurnalele de activitate și domeniile de permisiune pentru a permite interacțiunea securizată și responsabilitatea.
Încredere: „Munca mașinilor” trebuie să fie verificabilă, măsurabilă și prețuabilă. Folosind contracte inteligente, oracole și audituri - combinate cu Dovada Muncii Fizice (PoPW), Medii de Execuție de Încredere (TEE) și Dovezi Zero-Knowledge (ZKP) - execuția sarcinilor poate fi dovedită autentică și trasabilă, oferind valoare contabilă comportamentului mașinilor.
Stimulente: Web3 permite decontarea automată și fluxul de valoare între mașini prin stimulente token, abstractizare cont și canale de stare. Roboții pot utiliza microplăți pentru închirierea de calculatoare și partajarea de date, cu reducerea drastică a mizelor/reducerii drastice pentru a asigura performanța; contractele inteligente și oracolele pot coordona o piață descentralizată de coordonare a mașinilor cu intervenție umană minimă.
Guvernanță: Pe măsură ce mașinile câștigă autonomie pe termen lung, Web3 oferă o guvernanță transparentă și programabilă: DAO-urile decid împreună parametrii sistemului; semnăturile multiple și reputația mențin siguranța și ordinea. În timp, acest lucru duce la o guvernanță algoritmică - oamenii stabilesc obiective și limite, în timp ce contractele mediază stimulentele și verificările între mașini.
Viziunea supremă a Web3 × Robotics: o rețea de evaluare în lumea reală - flote distribuite de roboți care acționează ca „motoare de inferență a lumii fizice” pentru a testa și compara continuu performanța modelelor în medii diverse și complexe; și o forță de muncă robotică - roboți care execută sarcini fizice verificabile la nivel mondial, stabilesc câștigurile online și reinvestesc valoarea în upgrade-uri de calcul sau hardware.
Calea pragmatică astăzi. Fuziunea dintre inteligența întrupată și Web3 rămâne la început; economiile descentralizate bazate pe inteligență artificială sunt în mare măsură conduse de narativă și comunitate. Intersecțiile viabile pe termen scurt se concentrează în trei domenii:
Crowdsourcing și atribuire de date — stimulentele și trasabilitatea în lanț încurajează contribuitorii să încarce date din lumea reală.
Participare globală de tip „long-tail” — microplățile și microstimulentele transfrontaliere reduc costul colectării și distribuției datelor.
Financiarizare și inovație colaborativă— Structurile DAO pot permite activarea roboților, tokenizarea veniturilor și decontarea de la mașină la mașină.
Per ansamblu, integrarea roboticii și a Web3 va progresa în etape: pe termen scurt, accentul se va pune pe colectarea datelor și mecanismele de stimulare; pe termen mediu, se așteaptă progrese în ceea ce privește plățile bazate pe stablecoin, agregarea datelor long-tail și activezarea și decontarea modelelor RaaS; iar pe termen lung, pe măsură ce umanoizii se extind, Web3 ar putea evolua în fundamentul instituțional pentru deținerea de mașini, distribuția veniturilor și guvernanță, permițând o economie cu adevărat descentralizată a mașinilor.
IV. Peisajul roboticii Web3 și cazuri selectate
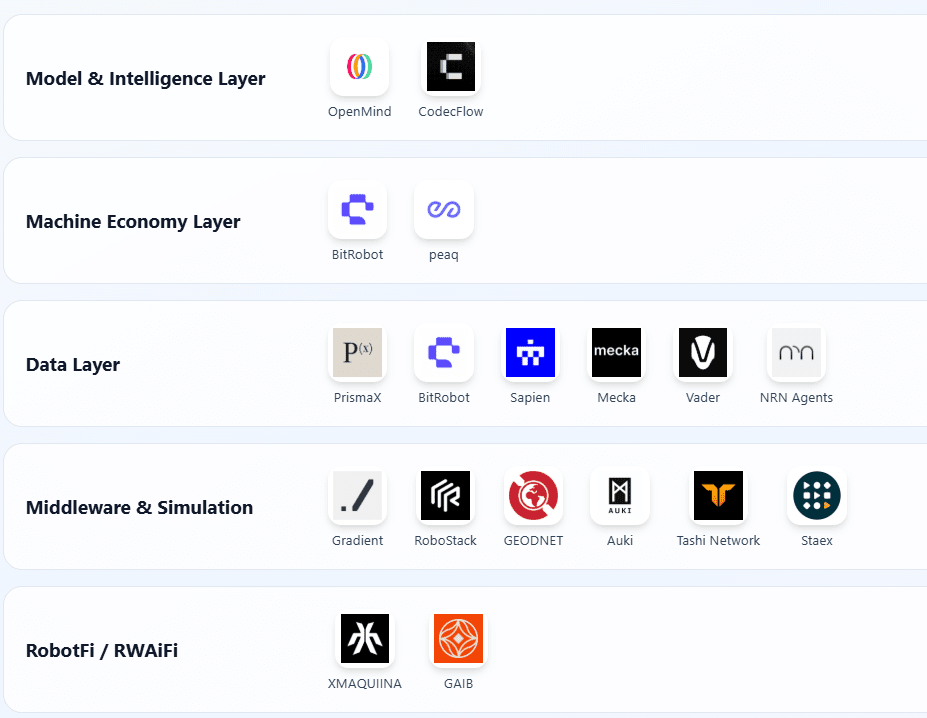
Pe baza a trei criterii — progres verificabil, deschidere tehnică și relevanță industrială — această secțiune cartografiază proiecte reprezentative la intersecția Web3 × Robotică, organizate în cinci straturi: Model și Inteligență, Economia Mașinilor, Colectarea Datelor, Infrastructura de Percepție și Simulare și Activele și Randamentul Roboticilor (RobotFi / RWAiFi). Pentru a rămâne obiectivi, am eliminat proiectele evident generate de exagerări sau insuficient documentate; vă rugăm să semnalați orice omisiuni.
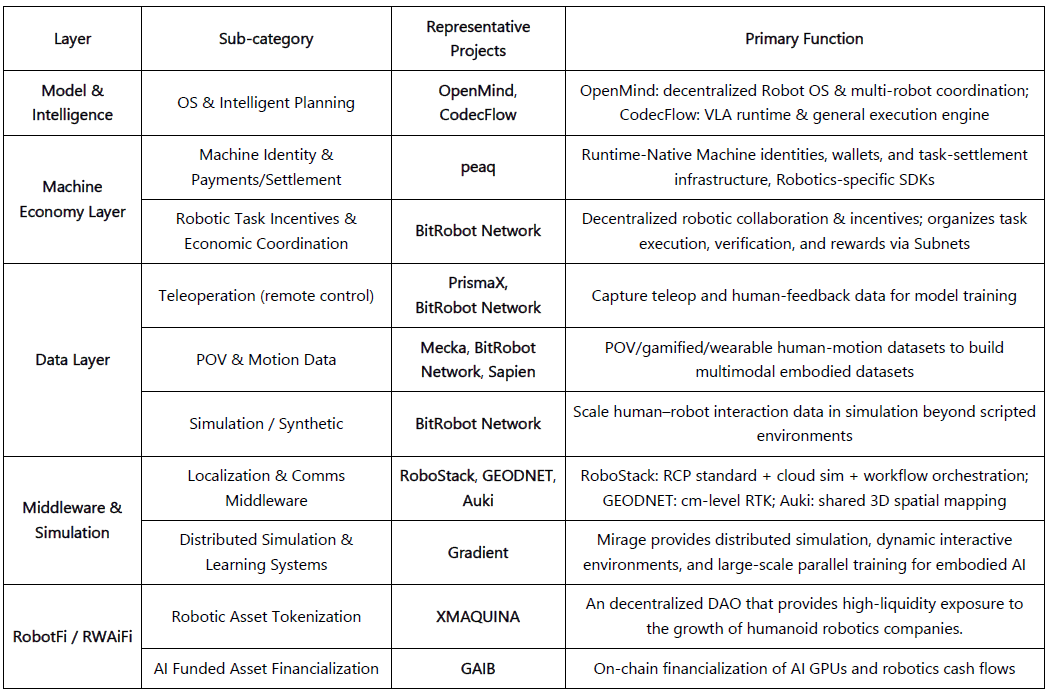
Model și strat de informații
OpenMind — Construirea de Android pentru roboți (https://openmind.org/)
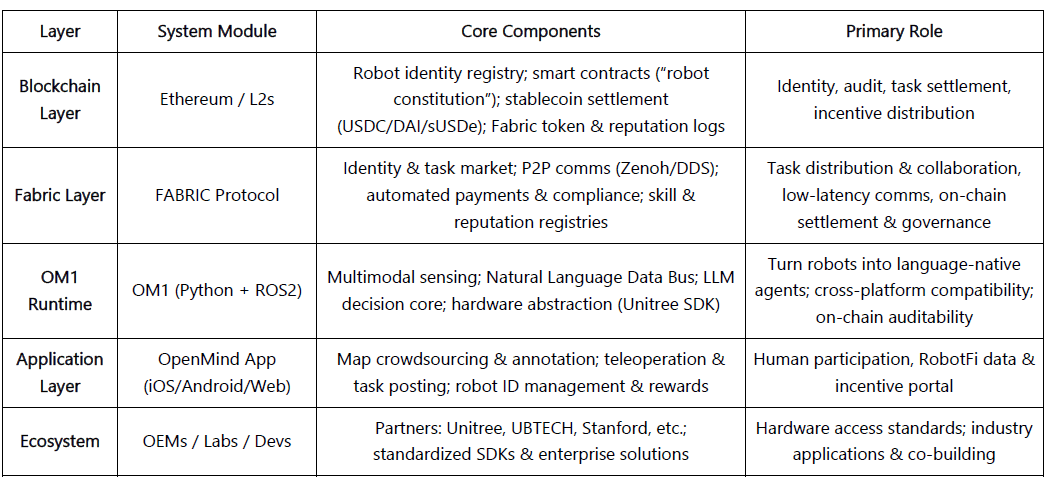
OpenMind este un sistem de operare open-source pentru roboți, destinat inteligenței artificiale și controlului întruchipat, care își propune să construiască prima platformă descentralizată de dezvoltare și execuție pentru roboți. Două componente principale:
OM1: Un strat de execuție modular, open-source, pentru agentul AI, construit pe ROS2, care orchestrează procesele de percepție, planificare și acțiune atât pentru roboții digitali, cât și pentru cei fizici.
FABRIC: Un strat de coordonare distribuit care conectează cloud computing, modele și roboți reali, astfel încât dezvoltatorii să poată controla/antrena roboți într-un mediu unificat.
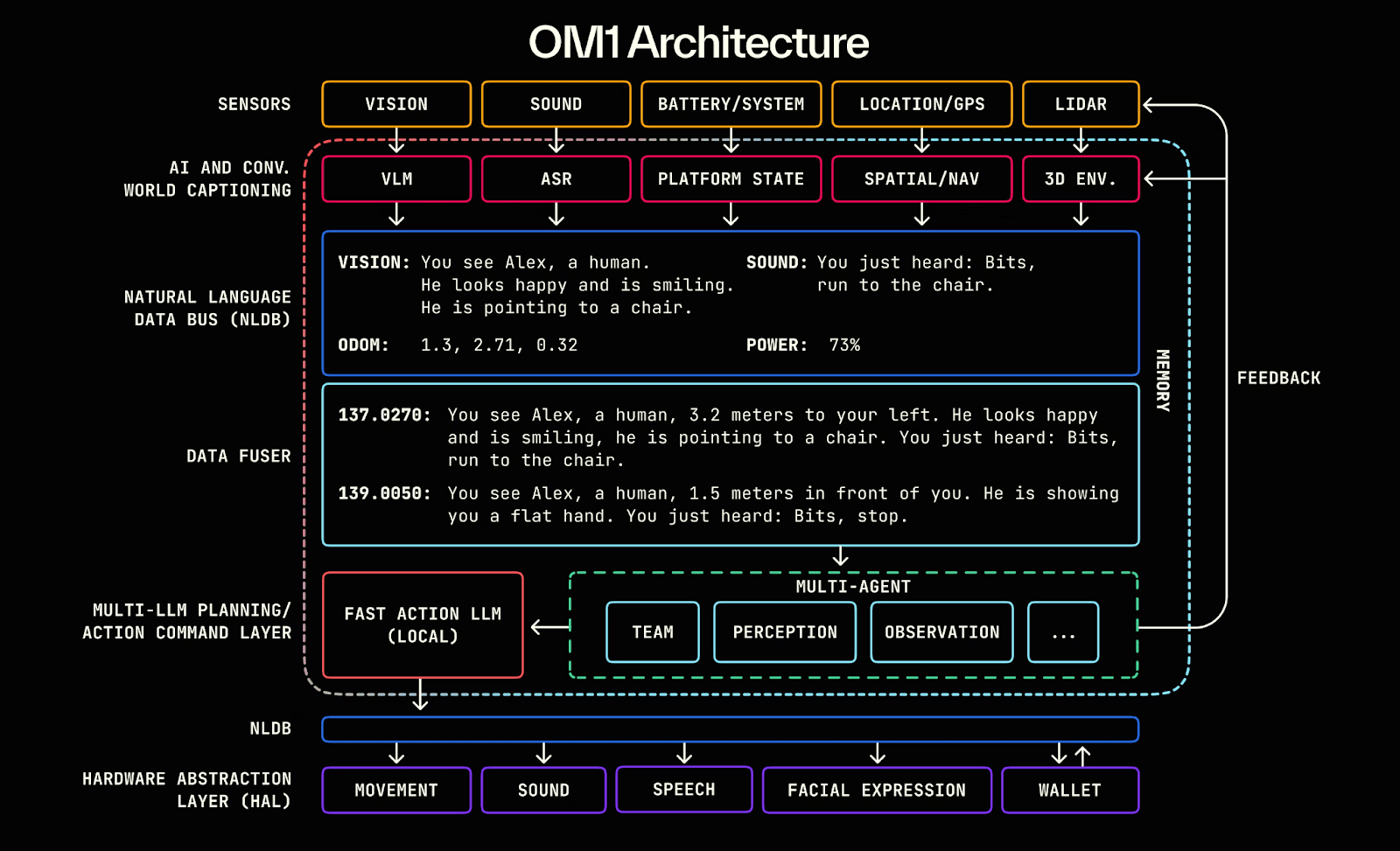
OpenMind acționează ca un middleware inteligent între LLM-uri și lumea robotică - transformând inteligența limbajului în inteligență întrupată și oferind o schelă de la înțelegere (Limbaj → Acțiune) la aliniere (Blockchain → Reguli). Sistemul său multistratificat formează o buclă completă de colaborare: oamenii oferă feedback/etichete prin intermediul aplicației OpenMind (date RLHF); Rețeaua Fabric se ocupă de identitate, alocarea sarcinilor și decontarea; roboții OM1 execută sarcini și se conformează unei „constituții robotice” on-chain pentru auditarea comportamentului și plăți - completând un ciclu descentralizat de feedback uman → colaborare între sarcini → decontare on-chain.
Progres și evaluare. OpenMind se află într-o fază incipientă, „funcțională din punct de vedere tehnic, nedemonstrată comercial”. OM1 Runtime este open-source pe GitHub cu intrări multimodale și o magistrală de date NL pentru analiza limbaj-acțiune - originală, dar experimentală. Până în prezent, fabric-ul și așezarea on-chain sunt modele la nivel de interfață. Legăturile cu ecosistemul includ Unitree, UBTECH, TurtleBot și universități (Stanford, Oxford, Seoul Robotics) pentru educație/cercetare; încă nu există implementări industriale. Aplicația este în versiune beta; stimulentele/sarcinile sunt la început.
Model de afaceri: OM1 (open-source) + Fabric (decontare) + Skill Marketplace (stimulente). Încă nu există venituri; se bazează pe o finanțare inițială de ~20 de milioane de dolari (Pantera, Coinbase Ventures, DCG). Ambițios din punct de vedere tehnic, cu o traiectorie lungă și dependență de hardware; dacă Fabric va fi lansat, ar putea deveni „Android-ul IA întrupată”.
CodecFlow — Motorul de execuție pentru robotică (https://codecflow.ai)
CodecFlow este un strat de execuție descentralizat pentru robotică pe Solana, care oferă medii de execuție la cerere pentru agenți de inteligență artificială și sisteme robotice - oferind fiecărui agent o „mașină instantanee”. Trei module:
Fabric: Agregator de calcul cross-cloud și DePIN (Weaver + Shuttle + Gauge) care pune în funcțiune mașini virtuale securizate, containere GPU sau noduri de control al roboților în câteva secunde.
SDK optr: Un framework Python care abstractizează conectorii hardware, algoritmii de antrenament și integrarea blockchain. Pentru a permite crearea de „operatori” care controlează desktop-uri, simulatoare sau roboți reali.
Stimulente pentru tokenuri: Stimulente on-chain pentru contribuitorii open source, răscumpărare din venituri și economie viitoare pentru piață
Obiectiv: Unificarea ecosistemului robotic fragmentat cu un singur nivel de execuție care să ofere constructorilor abstractizare hardware, instrumente de reglare fină, infrastructură de simulare în cloud și economie onchain, astfel încât aceștia să poată lansa și scala operatori generatori de venituri pentru roboți și desktop-uri.
Progres și evaluare. Early Fabric (Go) și optr SDK (Python) sunt disponibile; web/CLI poate lansa instanțe de calcul izolate, integrare cu NRN, ChainLink, peaq. Operator Marketplace vizează sfârșitul anului 2025, deservind dezvoltatorii de inteligență artificială, laboratoarele de robotică și operatorii de automatizare.

Stratul Economiei Mașinii
BitRobot — Laboratorul Deschis de Robotică al Lumii (https://bitrobot.ai)
O rețea descentralizată de cercetare și colaborare pentru inteligența artificială întrupată și robotică, inițiată în comun de FrodoBots Labs și Protocol Labs. Viziune: o arhitectură deschisă de subrețele + stimulente + muncă robotică verificabilă (VRW).
VRW: Definiți și verificați contribuția reală a fiecărei sarcini robotice.
ENT (Embodied Node Token): Identitate și responsabilitate economică a robotului on-chain.
Subrețele: Organizați colaborarea interregională între domeniile de cercetare, calcul, dispozitive și operatori.
Senat + Gandalf AI: Co-guvernare om-IA pentru stimulente și alocare de fonduri pentru cercetare.
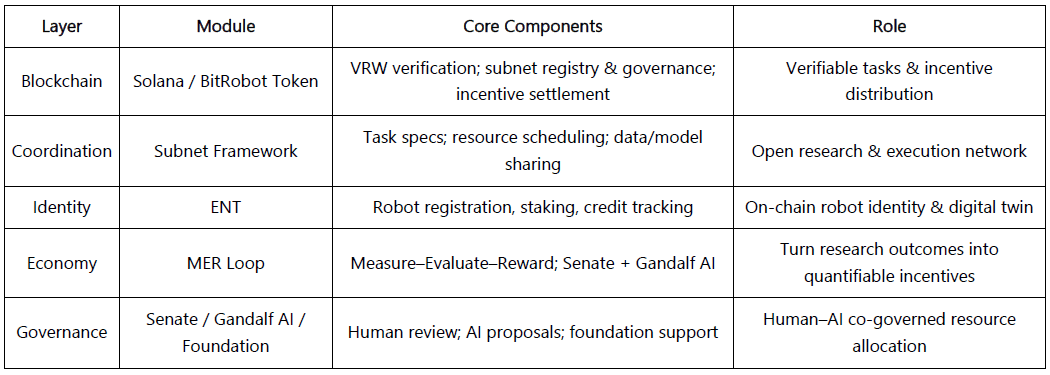
De la publicarea documentului său oficial din 2025, BitRobot a rulat mai multe subrețele (de exemplu, SN/01 ET Fugi, SN/05 SeeSaw by Virtuals), permițând teleoperarea descentralizată și capturarea datelor din lumea reală și a lansat un fond Grand Challenges în valoare de 5 milioane de dolari pentru a stimula cercetarea globală privind dezvoltarea de modele.
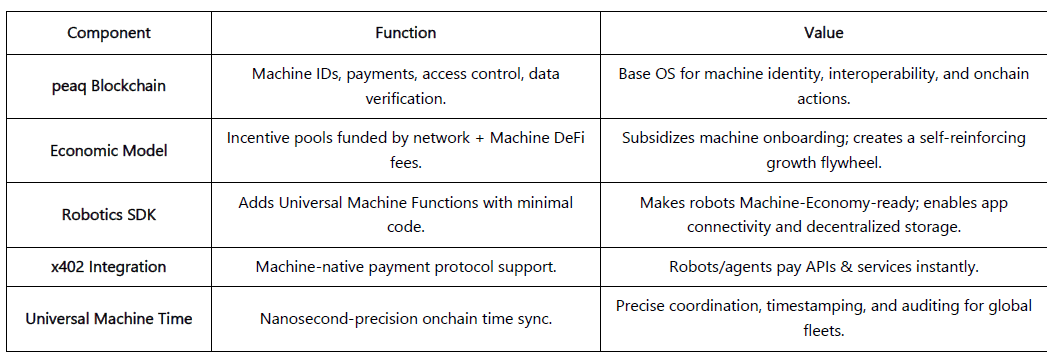
peaq — Calculatorul Economiei Mașinilor (https://www.peaq.xyz/)
peaq este un lanț Layer-1 construit pentru Economia Mașinilor, oferind identități ale mașinilor, portofele, controlul accesului și sincronizare temporală (Universal Machine Time) pentru milioane de roboți și dispozitive. SDK-ul său de robotică permite constructorilor să facă roboți „pregătiți pentru Economia Mașinilor” cu doar câteva linii de cod, permițând interoperabilitate neutră față de furnizor și interacțiune peer-to-peer.
Rețeaua găzduiește deja prima fermă robotică tokenizată din lume și peste 60 de aplicații pentru mașini din lumea reală. Cadrul de tokenizare al PEAQ permite companiilor de robotică să atragă lichidități pentru hardware cu capital intensiv și să extindă participarea dincolo de cumpărătorii tradiționali B2B/B2C. Fondurile sale de stimulente la nivel de protocol, finanțate din taxele de rețea, subvenționează integrarea mașinilor și oferă asistență constructorilor, creând o direcție de creștere pentru proiectele de robotică.
Stratul de date
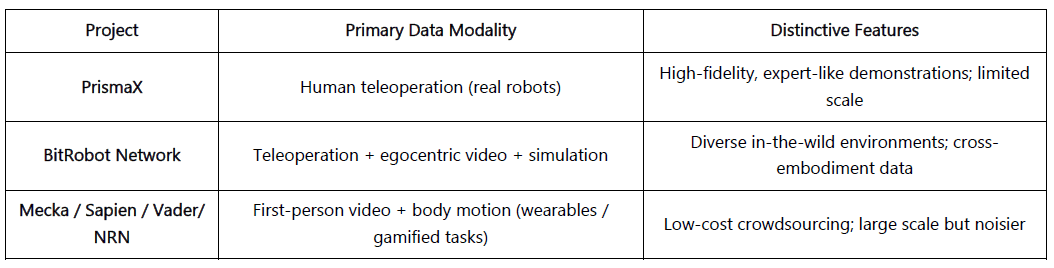
Scop: deblocarea datelor rare și costisitoare din lumea reală pentru antrenament integrat prin teleoperare (PrismaX, BitRobot Network), captura de mișcare și la persoana întâi (Mecka, BitRobot Network, Sapien、Vader、NRN) și conducte de simulare/sinteză (BitRobot Network) pentru a construi corpusuri de antrenament scalabile și generalizabile.
Notă: Web3 nu produce date mai bine decât giganții Web2; valoarea sa constă în redistribuirea economiei datelor. Cu ajutorul rails-urilor stablecoin + crowdsourcing-ului, stimulentele fără permisiune și atribuirea on-chain permit micro-decontare cu costuri reduse, proveniență și partajare automată a veniturilor. Open crowdsourcing-ul se confruntă în continuare cu lacune în controlul calității și cererea cumpărătorilor.
PrismaX (https://gateway.prismax.ai)
O economie descentralizată a teleoperațiilor și a datelor pentru IA întrupată — care vizează construirea unei piețe globale a muncii robotizate, în care operatorii umani, roboții și modelele de IA evoluează împreună prin stimulente on-chain.
Stiva de teleoperare: Interfață utilizator browser/VR + SDK conectează arme/roboți de serviciu la nivel global pentru control în timp real și captura de date.
Motor de evaluare: CLIP + DINOv2 + scorare semantică prin flux optic pentru a clasifica fiecare traiectorie și a se stabili pe lanț.
Completează bucla teleop → captura de date → antrenament de model → decontare on-chain, transformând munca umană în active de date.
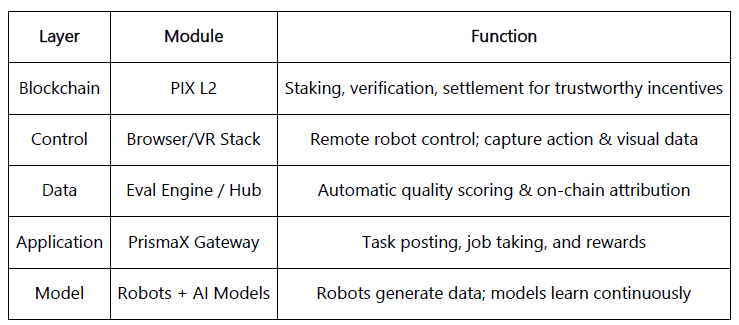
Progres și evaluare. Rețeaua de testare este activă din august 2025 (gateway.prismax.ai). Utilizatorii pot folosi brațele separat pentru sarcini de prindere și pentru a genera date de antrenament. Motorul de evaluare funcționează intern. Poziționare clară și nivel ridicat de exhaustivitate tehnică; candidat puternic pentru un protocol descentralizat de muncă și date pentru era întrupată, dar scalarea pe termen scurt rămâne o provocare.
Rețeaua BitRobot (https://bitrobot.ai/)
Subrețelele BitRobot Network consolidează colectarea de date prin video, teleoperare și simulare. Cu SN/01 ET Fugi, utilizatorii controlează de la distanță roboți pentru a finaliza sarcini, colectând date de navigare și percepție într-un „joc Pokemon Go din lumea reală”. Jocul a dus la crearea FrodoBots-2K, unul dintre cele mai mari seturi de date deschise de navigație om-robot, utilizat de UC Berkeley RAIL și Google DeepMind. SN/05 SeeSaw colectează prin crowdsourcing date video egocentrice prin intermediul iPhone din medii reale la scară largă. Alte subrețele anunțate, RoboCap și Rayvo, se concentrează pe colectarea de date video egocentrice prin intermediul unor implementări low-cost.
Mecca (https://www.mecka.ai)
Mecka este o companie de date robotice care realizează crowdsourcing cu demonstrații egocentrice de videoclipuri, mișcare și sarcini - prin intermediul capturilor mobile gamificate și al unor platforme hardware personalizate - pentru a construi seturi de date multimodale la scară largă pentru antrenamentul IA întruchipat.
Sapien (https://www.sapien.io/)
O platformă de crowdsourcing pentru date despre mișcarea umană, menită să susțină inteligența robotică. Prin intermediul dispozitivelor portabile și al aplicațiilor mobile, Sapien colectează date despre pozițiile și interacțiunile umane pentru a antrena modele întruchipate - construind o rețea globală de date despre mișcare.
Vader (https://www.vaderai.ai)
Vader furnizează prin crowdsourcing videoclipuri egocentrice și demonstrații de sarcini prin EgoPlay, un MMO din lumea reală în care utilizatorii înregistrează activitățile zilnice dintr-o perspectivă la persoana întâi și câștigă $VADER. Canalul său ORN convertește filmările brute din perspectiva utilizatorului în seturi de date structurate, sigure pentru confidențialitate, îmbogățite cu etichete de acțiune și narațiuni semantice - optimizate pentru instruirea în politici privind umanoizii.
Agenți NRN (https://www.nrnagents.ai/)
O platformă de date RL încorporat, gamificată, care generează demonstrații umane prin controlul roboților bazat pe browser și competiții simulate. NRN generează traiectorii comportamentale cu coadă lungă pentru învățarea prin imitație și RL continuu, folosind sarcini asemănătoare sportului ca primitive de date scalabile pentru instruirea în politici de la simulare la realitate.
Colectarea datelor întruchipate — Compararea proiectelor
Middleware și simulare
Stratul Middleware și Simulare formează coloana vertebrală dintre detectarea fizică și luarea deciziilor inteligente, acoperind localizarea, comunicarea, cartografierea spațială și simularea la scară largă. Domeniul este încă în stadiu incipient: proiectele explorează poziționarea de înaltă precizie, calculul spațial partajat, standardizarea protocoalelor și simularea distribuită, dar încă nu a apărut un standard unificat sau un ecosistem interoperabil.
Middleware și infrastructură spațială
Capacitățile robotice de bază — navigarea, localizarea, conectivitatea și cartografierea spațială — formează puntea dintre lumea fizică și procesul decizional inteligent. Deși proiectele DePIN mai ample (Silencio, WeatherXM, DIMO) menționează acum „robotica”, proiectele de mai jos sunt cele mai direct relevante pentru IA întrupată.
RoboStack — Stivă de operare pentru roboți nativă în cloud(https://robostack.io)
Integrarea sistemului de operare și a stivei de control pentru roboți native în cloudROS2,DDSșicalcul de margineSaleRCP (Protocolul de control al roboților)își propune să facă roboții apelabili/orchestrabili, precum serviciile cloud.GEODNET — Rețea GNSS descentralizată(https://geodnet.com)
O ofertă globală descentralizată de rețea de poziționare prin satelitRTK/GNSS la nivel de cmCu stații de bază distribuite și stimulente on-chain, oferă poziționare de înaltă precizie pentru drone, conducere autonomă și roboți - devenind...Stratul Geo-Infrastructurăa economiei mașinilor.Auki - Posemesh pentru calcul spațial(https://www.auki.com)
Un sistem descentralizatPosemeshrețea care generează hărți 3D partajate în timp real prin intermediul senzorilor și al tehnologiei de calcul crowdsourcing, permițând realitatea augmentată (AR), navigarea roboților și colaborarea pe mai multe dispozitive - fuziunea infrastructurii cheieAR × Robotică.Rețeaua Tashi — Coordonare în timp real a rețelelor de rețea pentru roboți(https://tashi.network)
O rețea mesh descentralizată care permite consensul sub 30 ms, schimbul de senzori cu latență redusă și sincronizarea stărilor multi-roboți. SDK-ul său MeshNet acceptă SLAM partajat, coordonarea roiului și actualizări robuste ale hărților pentru IA încorporată în timp real.Staex — Conectivitate și telemetrie descentralizată(https://www.staex.io)
Un strat descentralizat de conectivitate și gestionare a dispozitivelor de la Deutsche Telekom R&D, care oferă comunicare securizată, telemetrie fiabilă și rutare de la dispozitiv la cloud. Staex permite flotelor de roboți să facă schimb de date în mod fiabil și să interopereze între operatori.
Sisteme de simulare și învățare distribuite
Gradient – Către o inteligență deschisă (https://gradient.network/)
Gradient este un laborator de cercetare și dezvoltare în domeniul inteligenței artificiale dedicat construirii inteligenței deschise, permițând antrenament distribuit, inferență, verificare și simulare pe o infrastructură descentralizată. Setul său tehnologic actual include Parallax (inferență distribuită), Echo (învățare distribuită prin recompensă și antrenament multi-agent) și Gradient Cloud (soluții de inteligență artificială pentru întreprinderi).
În domeniul roboticii, Gradient dezvoltă Mirage — o platformă de simulare distribuită și învățare robotică, concepută pentru a construi modele de lume generalizabile și politici universale, care să ofere suport pentru medii interactive dinamice și antrenament paralel la scară largă. Se așteaptă ca Mirage să lanseze în curând framework-ul și modelul său, iar echipa a purtat discuții cu NVIDIA cu privire la o posibilă colaborare.
Active și randament robot (RobotFi / RWAiFi)
Acest strat transformă roboții din instrumente productive în active financiarizabile prin tokenizare, distribuție a veniturilor și guvernanță descentralizată, formând infrastructura financiară a economiei mașinilor.
XmaquinaDAO — DAO bazat pe inteligență artificială fizică (https://www.xmaquina.io)
XMAQUINA este un ecosistem descentralizat care oferă expunere globală și lichidă companiilor private de top din domeniul roboticii umanoide și al inteligenței artificiale încorporate, aducând în mod tradițional oportunități exclusiv de capital de risc (VC) online. Tokenul său, DEUS, funcționează ca un indice lichid și un activ de guvernanță, coordonând alocările de trezorerie și creșterea ecosistemului. Portalul DAO și Machine Economy Launchpad-ul permit comunității să dețină în comun și să sprijine proiecte emergente de inteligență artificială fizică prin intermediul activelor automate tokenizate și al participării structurate online.
GAIB — Nivelul economic pentru infrastructura IA (https://gaib.ai/)
GAIB oferă un strat economic unificat pentru infrastructura IA din lumea reală, cum ar fi GPU-urile și roboții, conectând capitalul descentralizat la activele productive ale infrastructurii IA și făcând randamentele verificabile, compozabile și on-chain.
În domeniul roboticii, GAIB nu „vinde token-uri pentru roboți”. În schimb, financiarizează echipamentele robotice și contractele de operare (RaaS, colectare de date, teleop) on-chain - convertind fluxurile de numerar reale → active compozabile cu randament on-chain. Aceasta cuprinde finanțarea echipamentelor (leasing/gajare), fluxurile de numerar operaționale (RaaS/servicii de date) și veniturile din drepturile de date (licențiere/contracte), făcând activele robotice și veniturile aferente măsurabile, evaluabile și tranzacționabile.
GAIB utilizează AID / sAID ca purtători de decontare/randament, susținuți de controale structurate ale riscurilor (supra-colateralizare, rezerve, asigurări). În timp, se integrează cu piețele derivate DeFi și cu cele de lichiditate pentru a închide bucla de la „active robotice” la „active cu randament compozabil”. Scopul: să devină coloana vertebrală economică a inteligenței în era IA.
Link către stiva de robotică Web3: https://fairy-build-97286531.figma.site/
V. Concluzie: Provocări actuale și oportunități pe termen lung
Dintr-o perspectivă pe termen lung, fuziunea dintre Robotică × Inteligență Artificială × Web3 își propune să construiască o economie descentralizată a mașinilor (Economia DeRobot), mutând inteligența întrupată de la „automatizarea cu o singură mașină” la colaborarea în rețea, care poate fi deținută, soluționată și guvernată. Logica centrală este o buclă auto-întăritoare - „Jeton → Implementare → Date → Redistribuirea Valorii” - prin care roboții, senzorii și nodurile de calcul dobândesc proprietate on-chain, tranzacționează și partajează veniturile.
Acestea fiind spuse, în stadiul actual, această paradigmă rămâne o explorare în stadiu incipient, încă departe de fluxuri de numerar stabile și o volatilitate comercială la scară largă. Multe proiecte sunt conduse de narațiuni, cu o implementare reală limitată. Fabricația și operațiunile de robotică necesită capital intensiv; stimulentele bazate pe token-uri nu pot finanța singure extinderea infrastructurii. Deși finanțarea on-chain este compozabilă, aceasta nu a rezolvat încă problema stabilirii prețului riscului activelor reale și a realizării fluxului de numerar. Pe scurt, „rețeaua de mașini autosustenabile” rămâne idealizată, iar modelul său de afaceri necesită validare în lumea reală.
Stratul Model și Inteligență. Aceasta este cea mai valoroasă direcție pe termen lung. Sistemele de operare pentru roboți open-source, reprezentate de OpenMind, urmăresc să spargă ecosistemele închise și să unifice coordonarea multi-roboți cu interfețe limbaj-acțiune. Viziunea tehnică este clară și completă din punct de vedere sistemic, dar povara inginerească este masivă, ciclurile de validare sunt lungi, iar feedback-ul pozitiv la nivel de industrie încă nu s-a format.
Stratul Economiei Mașinilor. Încă în faza de pre-market: baza de roboți din lumea reală este mică, iar identitatea bazată pe DID plus rețelele de stimulare se luptă să formeze o buclă auto-consistentă. Rămânem departe de o adevărată „economie a muncii mașinilor”. Abia după ce sistemele întruchipate sunt implementate la scară largă vor deveni evidente efectele economice ale identității on-chain, ale decontării și ale rețelelor de colaborare.
Stratul de date. Barierele sunt relativ mai mici - iar acest aspect este cel mai apropiat de viabilitatea comercială în prezent. Colectarea datelor întruchipate necesită continuitate spatiotemporală și o semantică a acțiunilor de înaltă precizie, care determină calitatea și reutilizabilitatea. Echilibrarea crowdscalelor cu fiabilitatea datelor este provocarea principală. PrismaX oferă un șablon parțial replicabil prin blocarea mai întâi a cererii de tip B-side și apoi distribuirea sarcinilor de captare/validare, dar scalarea ecosistemului și piețele de date vor necesita timp pentru a se maturiza.
Middleware și nivel de simulare. Încă în curs de validare tehnică, fără standarde unificate și cu interoperabilitate limitată. Rezultatele simulării sunt greu de standardizat pentru transferul în lumea reală; eficiența Sim2Real rămâne limitată.
Stratul RobotFi / RWAiFi. Rolul Web3 este în principal auxiliar - îmbunătățirea transparenței, a decontării și a eficienței finanțării în finanțarea lanțului de aprovizionare, leasingul de echipamente și guvernanța investițiilor, mai degrabă decât redefinirea economiei roboticii în sine.
Chiar și așa, credem că intersecția dintre Robotică × IA × Web3 marchează punctul de plecare al următorului sistem economic inteligent. Nu este doar o fuziune de paradigme tehnice; este, de asemenea, o oportunitate de a reforma relațiile de producție. Odată ce mașinile dobândesc identitate, stimulente și guvernanță, colaborarea om-mașină poate evolua de la automatizare localizată la autonomie în rețea. Pe termen scurt, acest domeniu va rămâne condus de narațiuni și experimentare, dar cadrele instituționale și de stimulare emergente pun bazele ordinii economice a unei viitoare societăți a mașinilor. Pe termen lung, combinarea inteligenței întruchipate cu Web3 va redesena limitele creării de valoare - ridicând agenții inteligenți în actori economici colaborativi, generatori de venituri și care pot fi considerați responsabili.
Declinare de responsabilitate: Acest articol a fost asistat de instrumente de inteligență artificială (ChatGPT-5 și Deepseek). Autorul s-a străduit să corecteze și să asigure acuratețea, dar pot exista erori. Rețineți că piețele activelor criptografice prezintă adesea divergențe între fundamentele proiectului și acțiunea prețului pe piața secundară. Acest conținut este destinat exclusiv sintezei informațiilor și schimbului academic/de cercetare și nu constituie consultanță de investiții sau o recomandare de cumpărare sau vânzare a vreunui token.