I have been tracking the Proof of Robotic Work mechanism since the Fabric whitepaper dropped in December 2025 — not the vision layer, the actual incentive mechanics underneath it. spent time mapping how the system is supposed to work, where the design is genuinely clever, and where the assumptions get thin. and honestly?
 the concept is more interesting than the marketing makes it sound, and more uncertain than the bulls acknowledge 😂
the concept is more interesting than the marketing makes it sound, and more uncertain than the bulls acknowledge 😂
let me explain the mechanism properly first because most content treats it as a buzzword rather than an actual system design.
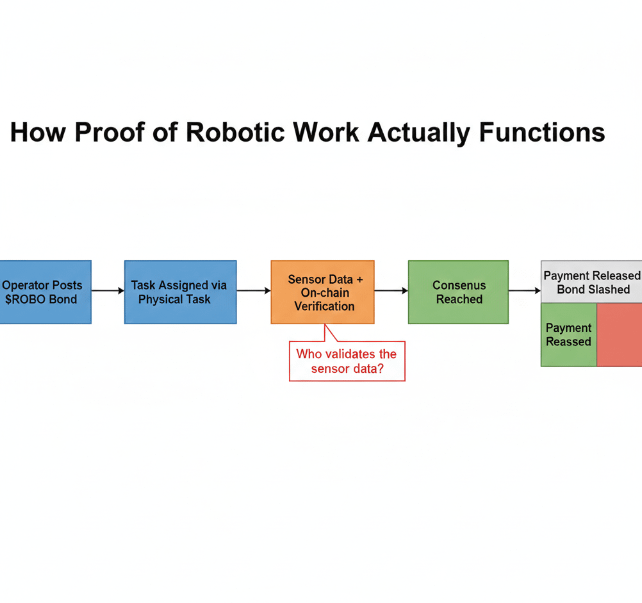
Proof of Robotic Work is Fabric's answer to a specific problem: how do you verify that a robot actually performed a task in the physical world, and how do you compensate it fairly without a central authority deciding what counts as work completed. the mechanism works like this. a robot operator posts a bond it robo tokens to participate in the network. the robot receives a task assignment through the Fabric coordination layer. it completes the task — physical action in the real world. the completion gets verified through a combination of on-chain data, sensor outputs, and challenge mechanisms. if the work is verified, the robot receives payment. if fraud or poor performance is detected, the operator's bond gets slashed. reputation builds on-chain over time, creating a verifiable track record for each machine.
the OM1 operating system from OpenMind is the runtime that makes this possible at the robot level. OM1 is open-source, robot-agnostic — it runs on humanoid robots, wheeled platforms, quadrupeds — and gives any hardware the ability to perceive, reason, act, and understand natural language without proprietary lock-in. Fabric sits above that as the coordination and economic layer. OM1 tells the robot what to do. Fabric tells the network who did it, whether they did it correctly, and how much they get paid.
what bugs me:
the verification problem in Proof of Robotic Work is fundamentally harder than it sounds on paper. verifying that ETH transferred from wallet A to wallet B is trivial — the blockchain saw it happen. verifying that a robot correctly completed a physical task — assembled a component, navigated a warehouse, performed a medical procedure — requires trusted sensor data, tamper-proof reporting from the robot itself, and challenge mechanisms that can resolve disputes when operator and verifier disagree. the whitepaper describes challenge mechanisms and slashing for fraud. it doesn't fully detail how sensor data gets validated before it reaches the chain, or who adjudicates disputes when physical-world evidence is ambiguous.
the tokenomics angle nobody discusses:
Robo is the gas, the bond, and the governance token simultaneously. that triple role creates demand from three different directions in theory. operators need tokens to post bonds. participants need tokens to pay network fees. governance participants need tokens to vote on protocol parameters. total supply: 10 billion fixed. circulating: 2.23B — 22.3%. FDV: $391.6M. market cap: $87.36M. ratio: 4.48x.
insider allocation: investors 24.3%, team and advisors 20.0% — combined 44.3% behind 12-month cliff opening February 2027. ecosystem and community: 29.7% on 40-month linear. foundation reserve: 18.0% on same schedule.
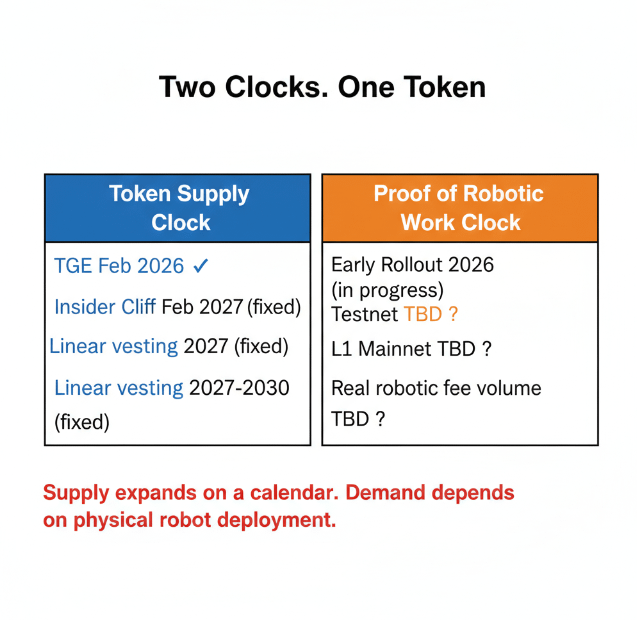
the original frame worth running: $ROBO token demand from Proof of Robotic Work depends entirely on the number of active robots posting bonds multiplied by the average bond size multiplied by network fee volume. today that number is effectively zero — the protocol is in early rollout, pre-testnet for the full system. the token is trading at $87M market cap against a demand mechanism that hasn't generated a single unit of real robotic work yet. that's not necessarily wrong — markets price futures. but the future being priced requires physical robot deployment at scale, which operates on a completely different timeline than software adoption.
my concern though:
the physical world verification gap is the mechanism that keeps me uncertain. blockchain consensus works because digital state is deterministic — the same input always produces the same output, and every node can verify independently. physical world tasks are non-deterministic. a robot that completes 95% of a warehouse navigation task and fails on the final meter — is that successful work or failed work. who decides. the whitepaper's slashing and challenge mechanisms assume disputes can be resolved cleanly. real-world robotic task completion is full of partial successes, environmental variables, and edge cases that on-chain consensus wasn't designed to adjudicate. the elegance of the design breaks at the boundary between digital coordination and physical reality.
what they get right:
the bonding and slashing design is genuinely well thought through. requiring operators to put capital at risk before participating — and destroying that capital for provable misbehavior — creates aligned incentives without a central authority enforcing quality. that's a real innovation in how robotic labor markets could function. the reputation system building on-chain over time means good robot operators accumulate verifiable track records that create compounding economic advantages. that's a moat that makes sense in a world where robot deployment is expensive and operator quality matters enormously to whoever is hiring robotic labor.
the open-source approach through OM1 is strategically smart. Fabric doesn't need to build the robots or the operating system — OpenMind did that. Fabric builds the coordination layer that any OM1-compatible robot can plug into. that's a platform play, not a hardware play, which means the potential addressable market is every robot running OM1 regardless of manufacturer or form factor.
the ERC-7777 and ERC-8004 standards for machine identity and trust are concrete infrastructure contributions that could outlast Fabric itself. if those standards get adopted broadly — even by projects that aren't using Robo they create network effects that pull adoption back toward the Fabric ecosystem that defined them.
what worries me:
the protocol roadmap runs from current state through testnet to L1 mainnet — and the whitepaper is deliberately vague about timelines. early rollout now. testnet at some undefined point. proprietary L1 at some further undefined point. meanwhile the 12-month insider cliff opens February 2027 regardless of where the protocol stands on that roadmap. if Proof of Robotic Work is still in testnet when 4.43 billion insider tokens become eligible — the economic mechanism designed to create token demand won't have generated meaningful real-world fee volume yet. supply expansion and demand creation are on different clocks.
only 2,730 total holders for an $87M market cap means the community that needs to grow into a global robotic labor coordination network is currently smaller than a mid-sized office building. vol/mkt cap hit 45.22% on ATH day — thin base, high volume, fresh token. the people pricing $ROBO today are a very small group making decisions about infrastructure designed for a much larger world.
honestly don't know if Proof of Robotic Work becomes the coordination standard for the robot economy, or if the physical-world verification gap proves harder to solve than the whitepaper assumes and the mechanism stays elegant in theory but messy in practice. both outcomes are genuinely possible from the same design.
what's your take - physical world verification solved well enough to build on or the assumption the whole model depends on?? 🤔