Когда я слышу, как люди говорят о регулировании в робототехнике, тон обычно звучит оборонительно. Как будто правила являются препятствиями, которые инновации должны обходить. Моя реакция другая — не восторг, а признание. Потому что настоящим барьером для широкомасштабного внедрения робототехники больше не является способность, а координация. Машины могут двигаться, видеть, вычислять и учиться. То, с чем они сталкиваются, так это с функционированием внутри систем, которые требуют ответственности, а ответственность не возникает автоматически из-за лучшего оборудования.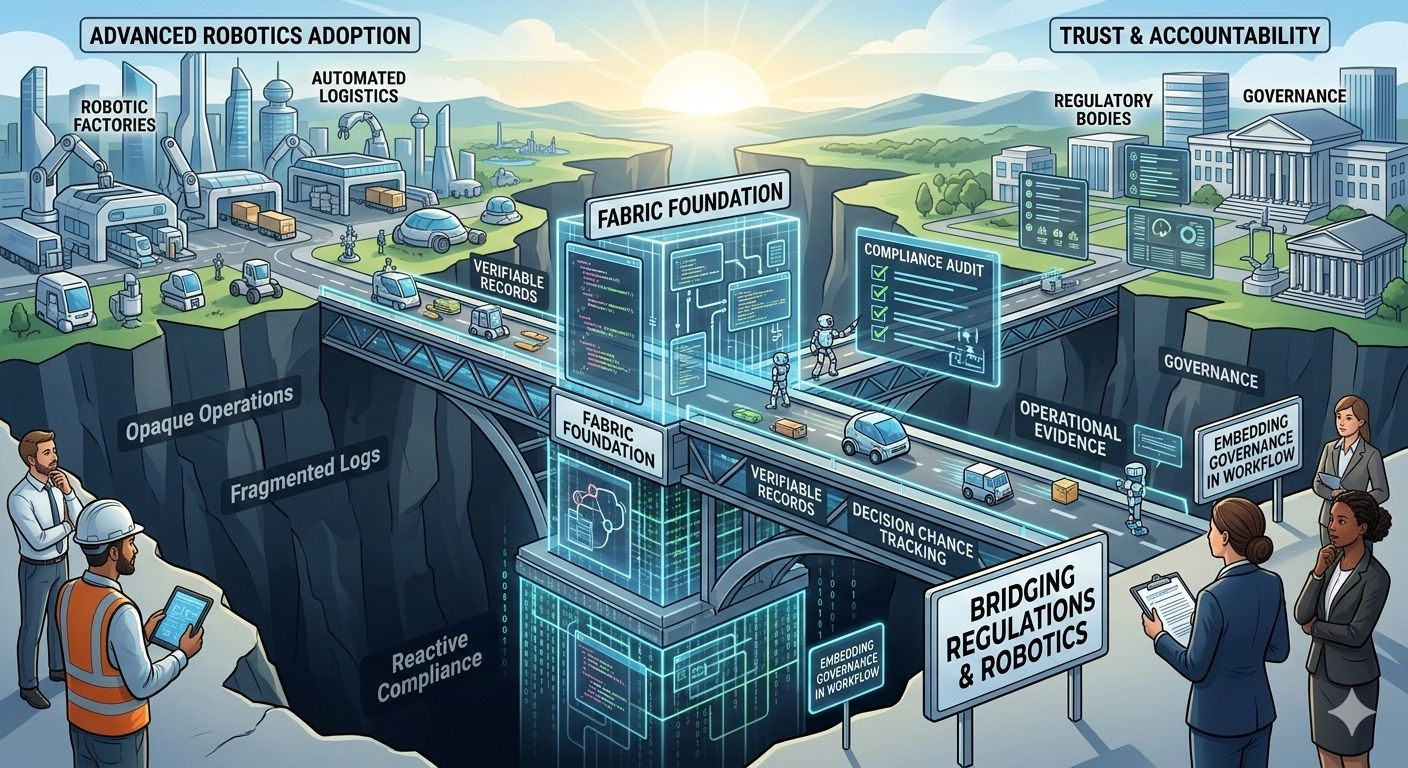
Большинство разговоров о робототехнике все еще рассматривают регулирование как внешнее давление. Сначала создайте робота, беспокойтесь о соответствии позже. Но в момент, когда роботы начинают взаимодействовать с реальными экономиками, заводами, логистическими сетями и общественной инфраструктурой, этот подход разрушается. Вопрос перестает быть «может ли робот выполнить задачу?» и становится «кто несет ответственность, когда он это делает?»
Вот где направление дизайна вокруг Фонда Fabric становится интересным. Не потому, что он сам строит роботов, а потому, что он пытается структурировать, как взаимодействуют роботы, данные и управление с самого начала.
В традиционной модели роботы существуют внутри частных силосов. Компания разворачивает машины, собирает данные и управляет соблюдением внутри компании. Если что-то идет не так, ответственность отслеживается через корпоративные отчетные системы, внутренние журналы и любые документы, которые могут существовать. Это работает для контролируемых сред, но не масштабируется, как только машины начинают работать в разных организациях или юрисдикциях.
Проблема заключается не только в технических аспектах, но и в структуре. Если робот выполняет задачу, которая включает несколько источников данных, несколько операторов и несколько моделей ИИ, проверка того, что на самом деле произошло, становится очень сложной. Кто обучал модель? Какой набор данных повлиял на решение? Какая версия программного обеспечения выполнила действие? Эти вопросы важны не только для отладки систем, но и для регуляторов, пытающихся определить ответственность. Большинство инфраструктуры сегодня не записывает эту цепочку событий так, чтобы ее можно было независимо проверить.
Подход Fabric меняет это предположение. Вместо того чтобы рассматривать управление как нечто, что добавляется после развертывания, система пытается встроить проверяемость непосредственно в рабочий процесс машин. Вычисления, входные данные и результаты могут быть записаны и координированы через общий слой инфраструктуры. Цель не в том, чтобы контролировать роботов с центральной авторитетной позиции, а в том, чтобы сделать их действия понятными для всех, кто должен им доверять.
Как только вы это сделаете, регулирование начинает выглядеть не как препятствие, а как координационный слой, потому что регуляторы на самом деле не требуют контроля над машинами. Им нужны доказательства. Доказательства того, что ограничения безопасности были соблюдены. Доказательства того, что решения можно отследить. Доказательства того, что системы действуют в рамках определенных границ. Когда эти доказательства существуют в фрагментированных внутренних журналах, надзор становится медленным и противостоящим. Когда они существуют в проверяемых записях, надзор становится процедурным. Эта разница важнее, чем люди осознают.
В современной робототехнике соблюдение часто является реактивным. Машина выходит из строя, происходит инцидент, и затем следователи восстанавливают, что произошло, из неполной информации. Этот процесс дорогой, медленный и иногда неопределенный. Встраивание проверяемых вычислений в инфраструктуру меняет последовательность. Вместо того чтобы восстанавливать события после факта, системы могут демонстрировать свое поведение по мере его возникновения. Но это также смещает ответственность тонкими способами.
Как только машины работают в рамках, которые можно проверить, операторы больше не могут полагаться на неоднозначность. Каждый ввод, выполнение модели и путь принятия решения становятся частью наблюдаемой записи. Эта прозрачность укрепляет доверие, но также повышает планку для всех участников: разработчиков, операторов и организаций, разворачивающих роботов, и именно здесь начинается настоящее искусство балансировки.
Потому что слишком много жесткости может замедлить инновации так же легко, как слишком мало надзора может подорвать доверие. Системы, которые механически обеспечивают соблюдение, могут испытывать трудности с адаптацией к новым типам машин или новым нормативным условиям. С другой стороны, системы, которые оставляют все гибким, рискуют стать непрозрачными снова. Задача заключается не просто в создании инфраструктуры. Это создание инфраструктуры, которая может развиваться параллельно как с технологией робототехники, так и с нормативными ожиданиями.
Еще один слой, который люди часто упускают из виду, - это совместимость. Роботы больше не работают в одиночку. Они взаимодействуют с ИИ-сервисами, платформами цепочки поставок, промышленным программным обеспечением и все чаще с другими автономными агентами. Каждая система имеет свои собственные политики, разрешения и пороги риска. Координация всего этого требует больше, чем просто протоколы связи, требуется общий набор правил о том, как работа машин проверяется и управляется. Без этого общего слоя сотрудничество между автономными системами становится хрупким.
Вот почему разговор о регулировании вокруг робототехники медленно смещается от отдельных устройств к операционным рамкам. Регуляторы меньше заботятся о конкретной модели робота и больше о том, может ли система, окружающая этого робота, надежно демонстрировать соблюдение. Другими словами, управление переходит от сертификации оборудования к проверке процессов.
Инфраструктура, разработанная вокруг проверяемых вычислений, естественно подходит для этого направления. Конечно, ничто из этого не исключает риски. Проверяемая система все еще может испытывать сбои, несоответствующие стимулы или ошибочные входные данные. Но это меняет, где живет доверие. Вместо того чтобы доверять отдельным организациям в точности отчета, участники доверяют инфраструктуре, которая записывает и координирует деятельность машин.
Это тонкий, но важный сдвиг, потому что, как только доверие переходит в инфраструктуру, экосистемы начинают формироваться вокруг него. Разработчики создают инструменты, которые предполагают проверяемое выполнение. Компании развертывают роботов, зная, что доказательства соблюдения автоматически записываются. Регуляторы оценивают поведение через структурированные данные, а не фрагментированные отчеты.
Со временем это согласование снижает трение между инновациями и надзором. Интересная часть заключается в том, что это не выглядит драматично снаружи. Нет единого момента, когда робототехника внезапно становится «правильно регулируемой». Вместо этого сдвиг происходит тихо, когда системы, которые встраивают ответственность, становятся проще в эксплуатации, чем системы, которые этого не делают. И когда это происходит, управление перестает восприниматься как внешнее ограничение и начинает функционировать как часть операционной среды.
Итак, настоящий вопрос не в том, столкнется ли робототехника с регулированием. Этот исход неизбежен, как только машины начнут входить в реальные экономики. Более интересный вопрос состоит в том, какие инфраструктурные слои делают это регулирование осуществимым без замедления прогресса. Потому что соединение робототехники и регулирования не сводится к написанию более строгих правил. Речь идет о проектировании систем, где доказать ответственное поведение проще, чем скрыть безответственное поведение.
И долгосрочный успех подходов, подобных тому, который возникает вокруг Fabric, вероятно, будет зависеть от простого теста: когда автономные машины станут обычным явлением в разных отраслях, будут ли их действия достаточно прозрачными, чтобы общества могли им доверять без постоянного вмешательства? Вот мост, который имеет значение.
@Fabric Foundation $ROBO #ROBO

