
@Fabric Foundation . Я помню, как однажды смотрел, как складской робот скользит по проходу, подбирая, сканируя, корректируя свой маршрут без колебаний. Движение было почти элегантным. Но система, стоящая за этим, была менее впечатляющей, как только вы смотрели ближе. Закрытая панель управления. Собственная логика маршрутизации. Каждая команда в конечном итоге прослеживалась до инфраструктуры одной компании.
Этот шаблон встречается повсюду в робототехнике.
Машины, которые выглядят автономными на поверхности, обычно работают в строго контролируемых программных средах. Интеллект может быть распределен по датчикам и моделям, но власть за системой остается централизованной.
Что поднимает другой вопрос: что происходит, когда роботы сами функционируют внутри открытых сетей, а не закрытых корпоративных систем?
Это направление, которое исследует Фонд Fabric через Протокол Fabric — уровень инфраструктуры, предназначенный для координации интеллектуальных машин с использованием проверяемых вычислений и родной архитектуры агентов. Идея довольно радикальна, если следовать ей до конца: роботы, агенты ИИ и люди все взаимодействуют через общий протокол, где идентичность, задачи и результаты могут быть проверены без обращения к центральному оператору.
Будет ли эта архитектура действительно работать в большом масштабе, все еще остается открытым вопросом. Но само направление сигнализирует о чем-то важном. Робототехника, ИИ и децентрализованная инфраструктура начинают сходиться такими способами, которые кажутся менее теоретическими, чем несколько лет назад.
Архитектурные основы
Большинство систем робототехники сегодня спроектированы как вертикальные стеки. Аппаратное обеспечение внизу, программные контрольные уровни выше, а централизованная оркестрация находится на верхнем уровне.
Протокол Fabric подходит к этой проблеме иначе. Вместо того чтобы строить закрытую платформу робототехники, он пытается создать уровень координации, где машины могут взаимодействовать через общую инфраструктуру.
Два компонента сразу же проявляются в дизайне: идентичность и верификация. Третий уровень — координация — возникает почти как соединительная ткань между ними.
Идентичность машины
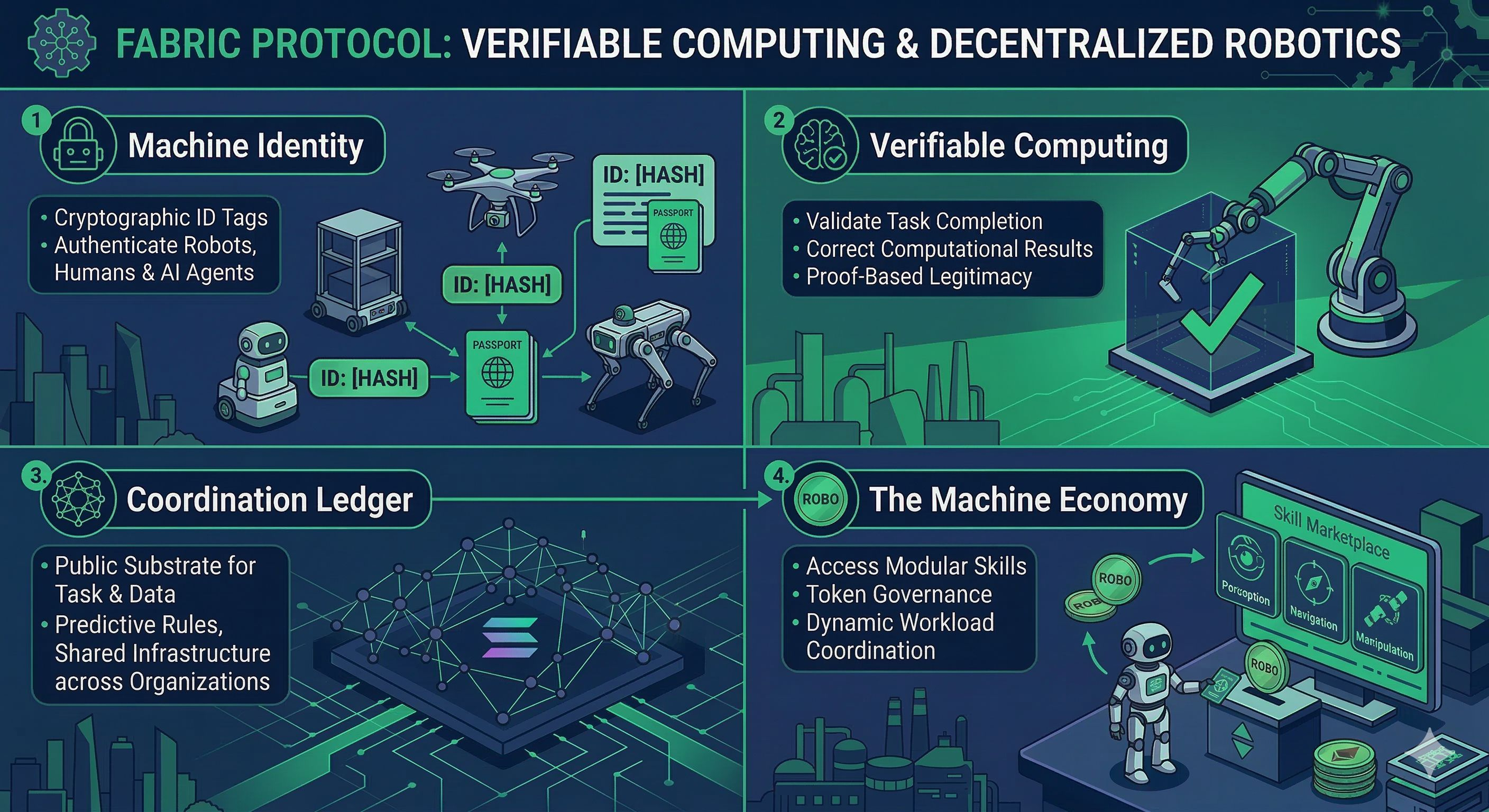
Каждый участник сети получает криптографическую идентичность, записанную в публичном реестре.
Это включает людей, агентов ИИ и физических роботов.
Эффект звучит просто, но он меняет то, как машины взаимодействуют с окружающими системами. Робот может аутентифицировать себя в сети. Задачи могут быть приписаны конкретным машинам. И в некоторых случаях сами машины могут выполнять транзакции, связанные с их идентичностью.
Вместо того чтобы существовать как анонимные аппаратные конечные точки, роботы начинают вести себя больше как узлы внутри распределенной системы.
Проверяемые вычисления
Более интересный уровень, однако, — это Проверяемые вычисления.
В децентрализованных средах доверие быстро становится проблемой. Если робот утверждает, что он выполнил задачу — или модель ИИ утверждает, что она произвела результат — как остальная часть сети знает, что это утверждение законно?
Fabric подходит к этому через криптографические механизмы верификации, которые позволяют доказать вычислительные результаты, а не просто сообщать о них.
Этот уровень доказательства может подтвердить несколько вещей:
что роботизированная задача действительно произошла
что вычислительный результат был получен корректно
что агент следовал конкретным правилам выполнения
Вместо того чтобы полагаться на централизованные системы мониторинга, сама сеть становится рамками верификации.
Координационный реестр
Идентичность и верификация сами по себе не создают функционирующую систему. Машинам все еще нужна общая среда, где задачи, результаты и экономическая деятельность могут быть записаны.
Здесь появляется уровень координации.
Протокол поддерживает публичный реестр, где зафиксирована активность сети. Назначение задач, действия машин, доказательства верификации и платежи все проходят через этот уровень. Он функционирует менее как традиционный блокчейн-реестр и больше как координационный субстрат — среда, где несколько типов агентов могут взаимодействовать с предсказуемыми правилами.
Инфраструктура, родная для агентов
Большинство цифровых платформ предполагают, что за клавиатурой есть человек.
Fabric этого не делает.
Инфраструктура разработана с ожиданием, что автономные агенты — программные системы и машины — будут взаимодействовать друг с другом напрямую.
Это меняет то, как сети должны вести себя.
Взаимодействие между машинами становится рутинным. Агенты обнаруживают задачи без участия человека. Транзакции могут происходить автоматически, когда работа выполнена. Система начинает напоминать что-то ближе к автоматизированному рынку труда, чем к традиционной программной платформе.
Не трудно представить, как это развивается. Как только машины могут аутентифицировать себя, проверять свою работу и завершать транзакции, основные ингредиенты машинной экономики начинают появляться почти естественным образом.
Модульная когнитивная и навыковая слои
Еще одно интересное решение в архитектуре — это то, как структурирован интеллект.
Вместо того чтобы встраивать одну огромную модель ИИ в каждый робот, система поощряет модульные уровни когнитивных способностей. Роботы могут извлекать из нескольких модульных возможностей — модели восприятия, навигационные системы, уровни рассуждений и, в конечном итоге, навыки манипуляции.
Эти модули функционируют почти как программные расширения.
Разработчики могут улучшать их независимо. Новые возможности могут быть введены без перестройки целых машин. Со временем экосистема может начать напоминать рынок роботизированных способностей, где специализированные алгоритмы становятся общей инфраструктурой по всей сети.
Это тонкий выбор дизайна, но он хорошо согласуется с децентрализованными моделями разработки.
Экономика токенов ROBO
Экономическая координация внутри экосистемы осуществляется за счет родного токена сети, ROBO.
Большинство токенов в этой отрасли в конечном итоге ведут себя как спекулятивные активы. Fabric пытается сделать что-то немного другое, связывая токен непосредственно с операционными функциями внутри сети.
Роботы и агенты используют токен для доступа к услугам, таким как верификация, регистрация идентичности и вычислительная координация.
Токен также играет роль в управлении. Участники могут голосовать за обновления протокола, параметры инфраструктуры и корректировки политики. В теории это распределяет принятие решений по экосистеме, а не концентрирует его внутри одной организации.
Сработает ли управление плавно в системах, координирующих физические машины, остается открытым вопросом — но механизм, по крайней мере, пытается согласовать интересы между разработчиками, поставщиками инфраструктуры и операторами.
Потенциальные приложения
Логистика — это очевидная отправная точка.
Склады, системы доставки и роботизированные флоты уже функционируют с значительной автоматизацией. Децентрализованный уровень координации мог бы позволить этим системам взаимодействовать между организациями, а не оставаться заблокированными внутри проприетарных платформ.
Промышленная автоматизация, вероятно, последует. Фабрики, разв deploying fleets of machines could coordinate workloads dynamically based on demand across shared networks.
Обслуживание инфраструктуры менее очевидно, но потенциально больше. Автономные системы, ответственные за инспекцию трубопроводов, обслуживание энергетических сетей или мониторинг экологических условий, могут функционировать под децентрализованной координацией.
А затем есть рынки услуг — роботы, выполняющие задачи по уборке, инспекции, безопасности или доставке, которые автономно обнаруживают работу через цифровые рынки.
В каждом случае машины перестают вести себя как статическое оборудование. Они начинают выглядеть больше как экономические участники, участвующие в сетях.
Вызовы и открытые вопросы
Конечно, робототехника вводит сложности, которые чисто цифровые блокчейн-системы редко испытывают.
Надежность аппаратного обеспечения имеет значение. Физическая безопасность имеет еще большее значение. Скомпрометированный сервер может вызвать потерю данных; скомпрометированный робот может причинить реальный вред.
Безопасность, следовательно, становится более сложной. Уязвимости сети больше не являются просто программными проблемами.
Масштабируемость — это еще одна проблема. Координация тысяч — не говоря уже о миллионах — автономных машин через децентрализованную инфраструктуру потребует чрезвычайно эффективных систем верификации.
Также неясно, как регуляторные рамки будут развиваться вокруг машинных экономик. Правовые системы все еще борются с определением ответственности, когда автономные системы принимают решения.
Все эти проблемы находятся прямо под поверхностью архитектуры.
Новая экономика машин
В течение многих лет блокчейн-системы сосредотачивались почти исключительно на финансовой координации — токены, платежи, децентрализованные обмены.
Но по мере улучшения моделей ИИ и продолжения развития робототехники появляется другая грань.
Сети, которые координируют физическую работу.
Вот где Протокол Fabric становится интересным. Не обязательно потому, что каждая часть видения будет успешной, а потому что он пытается соединить несколько технологических тенденций, которые все равно движутся друг к другу: интеллектуальные агенты, автономные машины и децентрализованная инфраструктура.
Если такие системы когда-либо будут функционировать в большом масштабе, последствия начнут выходить далеко за пределы криптовалюты.
Потому что в этот момент сеть не просто координирует данные или активы.
Она координирует машины.
