Автор: 0xjacobzhao | https://linktr.ee/0xjacobzhao
Этот независимый исследовательский отчет поддерживается IOSG Ventures. Автор благодарит Ханса (RoboCup Asia-Pacific), Ничанан Кесонпат(1kx), Роберта Кошига (1kx), Аманду Янг (Collab+Currency), Джонатана Виктора (Ansa Research), Лекса Соколина (Generative Ventures), Джея Ю (Pantera Capital), Джеффри Ху (Hashkey Capital) за их ценные комментарии, а также участников из OpenMind, BitRobot, peaq, Auki Labs, XMAQUINA, GAIB, Vader, Gradient, Tashi Network и CodecFlow за их конструктивные отзывы. Несмотря на все усилия для обеспечения объективности и точности, некоторые идеи неизбежно отражают субъективную интерпретацию, и читатели призываются критически относиться к содержанию.
I. Робототехника: От промышленной автоматизации до гуманоидного интеллекта
Традиционная индустрия робототехники разработала вертикально интегрированную цепочку добавленной стоимости, состоящую из четырех основных слоев: основные компоненты, системы управления, готовые машины и системная интеграция и приложения.
Основные компоненты (контроллеры, сервоприводы, редукторы, датчики, батареи и т. д.) имеют самые высокие технические барьеры, определяя как потолки производительности, так и полы стоимости.
Системы управления действуют как "мозг и мозжечок" робота, отвечая за принятие решений и планирование движений.
Полное производство машин отражает способность интегрировать сложные цепочки поставок.
Системная интеграция и разработка приложений определяют глубину коммерциализации и становятся ключевыми источниками создания ценности.
В глобальном масштабе робототехника развивается по четкой траектории — от промышленной автоматизации → специфического интеллекта → интеллекта общего назначения — формируя пять основных категорий: промышленные роботы, мобильные роботы, сервисные роботы, специализированные роботы и гуманоиды.
Промышленные роботы: В настоящее время это единственный полностью зрелый сегмент, промышленные роботы широко используются в сварке, сборке, покраске и обработке на производственных линиях. Отрасль характеризуется стандартизированными цепочками поставок, стабильными маржами и четко определенной рентабельностью инвестиций. Внутри этой категории, коллаборативные роботы (cobots)— разработанные для безопасного сотрудничества человека и робота, легкой работы и быстрой развертки.
Представительные компании: ABB, Fanuc, Yaskawa, KUKA, Universal Robots, JAKA и AUBOМобильные роботы: Включая AGV (Автоматизированные Направляемые Транспортные Средства) и AMR (Автономные Мобильные Роботы), эта категория широко используется в логистике, выполнении заказов в электронной коммерции и транспортировке на фабриках. Это самый зрелый сегмент для B2B приложений.
Представительные компании: Amazon Robotics, Geek+, Quicktron, Locus Robotics.Сервисные роботы: Ориентированные на потребительский и коммерческий сектора — такие как уборка, общественное питание и образование — это самая быстроразвивающаяся категория на потребительской стороне. Уборочные роботы теперь следуют логике потребительской электроники, в то время как медицинские и доставочные роботы быстро коммерциализируются. Новая волна более общих манипуляторов (например, системы с двумя руками, такие как Dyna) появляется — более гибкие, чем продукты, специфичные для задач, но не такие общие, как гуманоиды.
Представительные компании: Ecovacs, Roborock, Pudu Robotics, KEENON Robotics, iRobot, Dyna.
Специальные роботы: Разработанные для высокорисковых или нишевых приложений — здравоохранение, военное дело, строительство, морские и аэрокосмические технологии — эти роботы обслуживают небольшие, но прибыльные рынки с высокими барьерами входа, обычно полагаясь на государственные или корпоративные контракты.
Представительные компании: Intuitive Surgical, Boston Dynamics, ANYbotics, NASA Valkyrie, Honeybee RoboticsГуманоидные роботы: Считаются будущей "универсальной трудовой платформой", гуманоидные роботы привлекают наибольшее внимание на переднем крае эмбеддед интеллекта.
Представительные компании: Tesla (Optimus), Figure AI (Figure 01), Sanctuary AI (Phoenix), Agility Robotics (Digit), Apptronik (Apollo), 1X Robotics, Neura Robotics, Unitree, UBTECH, Agibot
Основная ценность гуманоидных роботов заключается в их морфологии, подобной человеческой, позволяя им работать в существующих социальных и физических средах без изменения инфраструктуры. В отличие от промышленных роботов, которые стремятся к максимальной эффективности, гуманоиды подчеркивают общую адаптивность и переносимость задач, что позволяет легко развертывать их на фабриках, в домах и общественных местах.
Большинство гуманоидов остаются на стадии технической демонстрации, сосредоточенные на проверке динамического баланса, локомоции и манипуляционных способностей. Хотя ограниченные развертывания начали появляться в строго контролируемых заводских условиях (например, Figure × BMW, Agility Digit), и дополнительные поставщики, такие как 1X, ожидаются для раннего распределения, начиная с 2026 года, это все еще узкоспектные, однотипные приложения — не настоящая интеграция труда общего назначения. Значительная крупномасштабная коммерциализация все еще годы впереди.
Основные узкие места охватывают несколько слоев:
Координация многоосных систем и реальный динамический баланс остаются сложными;
Энергия и выносливость ограничены плотностью батарей и эффективностью актуаторов;
Потоки восприятия и принятия решений часто дестабилизируются в открытых средах и не могут обобщаться;
Значительный разрыв в данных ограничивает обучение обобщенных политик;
Кросс-эмбеддинг передача еще не решена;
Цепочки поставок аппаратного обеспечения и кривые стоимости — особенно за пределами Китая — остаются значительными барьерами, что делает дешевое, крупномасштабное развертывание затруднительным.
Коммерциализация гуманоидной робототехники будет развиваться в три этапа: Demo-as-a-Service в краткосрочной перспективе, управляемая пилотными проектами и субсидиями; Robotics-as-a-Service (RaaS) в среднем сроке, поскольку экосистемы задач и навыков начинают появляться; и модель Labor Cloud в долгосрочной перспективе, когда ценность переместится от аппаратного обеспечения к программному обеспечению и сетевым услугам. В целом, гуманоидная робототехника вступает в критический переход от демонстрации к самообучению. Смогут ли отрасли преодолеть переплетенные барьеры контроля, стоимости и интеллекта, будет определять, сможет ли эмбеддед интеллект действительно стать масштабируемой экономической силой.
II. AI × Робототехника: Рассвет эры эмбеддед интеллекта
Традиционная автоматизация сильно полагается на заранее запрограммированную логику и архитектуры управления на основе конвейеров — такие как парадигма DSOP (восприятие–планирование–управление) — которые функционируют надежно только в структурированных средах. Реальный мир, однако, намного сложнее и непредсказуемее. Новое поколение Эмбеддед AI следует совершенно другой парадигме: используя большие модели и обучение единой репрезентации, чтобы предоставить роботам кросс-сценарные возможности для понимания, предсказания и действия. Эмбеддед интеллект подчеркивает динамическое взаимодействие тела (аппаратуры), мозга (моделей) и окружающей среды (взаимодействия). Робот всего лишь транспортное средство — интеллект является истинным ядром.
Генеративный AI представляет собой интеллект в символическом и лингвистическом мире — он превосходен в понимании языка и семантики. Эмбеддед AI, напротив, представляет собой интеллект в физическом мире — он овладевает восприятием и действиями. Два из них соответствуют "мозгу" и "телу" эволюции AI, формируя два параллельных, но сходящихся фронта.
С точки зрения иерархии интеллекта, Эмбеддед AI является более высокой способностью, чем генеративный AI, но его зрелость значительно отстает. LLM получают выгоду от обширных данных в масштабе интернета и четко определенного цикла "данные → вычисления → развертывание". Интеллект роботов, однако, требует эгоцентрических, многомодальных, основанных на действиях данных — траектории телеоперации, видео с первого лица, пространственные карты, последовательности манипуляции — которые не существуют по умолчанию и должны быть созданы через взаимодействие с реальным миром или высококачественную симуляцию. Это делает данные намного более редкими, дорогими и сложными для масштабирования. Хотя симулированные и синтетические данные помогают, они не могут полностью заменить реальный сенсомоторный опыт. Именно поэтому такие компании, как Tesla и Figure, должны управлять телеоперационными фабриками, и почему в Юго-Восточной Азии возникли фермы по сбору данных. Короче говоря, LLM учатся на существующих данных; роботы должны создавать свои собственные через физическое взаимодействие.
В следующие 5–10 лет оба направления глубоко сольются через модели Видение–Язык–Действие (VLA) и архитектуры Эмбеддед Агентов — LLM будут обрабатывать высокоуровневое познание и планирование, в то время как роботы будут выполнять реальные действия, формируя двунаправленный цикл между данными и эмбеддингом, тем самым поднимая AI от языкового интеллекта к истинному общему интеллекту (AGI).
Основной Технологический Стек Эмбеддед Интеллекта
Эмбеддед AI можно концептуализировать как интеллект-стек, состоящий из:
VLA (Слияние Восприятия), RL/IL/SSL (Обучение), Sim2Real (Передача Реальности), Мировая Модель (Когнитивное Моделирование) и Рой и Рассуждения (Коллективный Интеллект и Память).
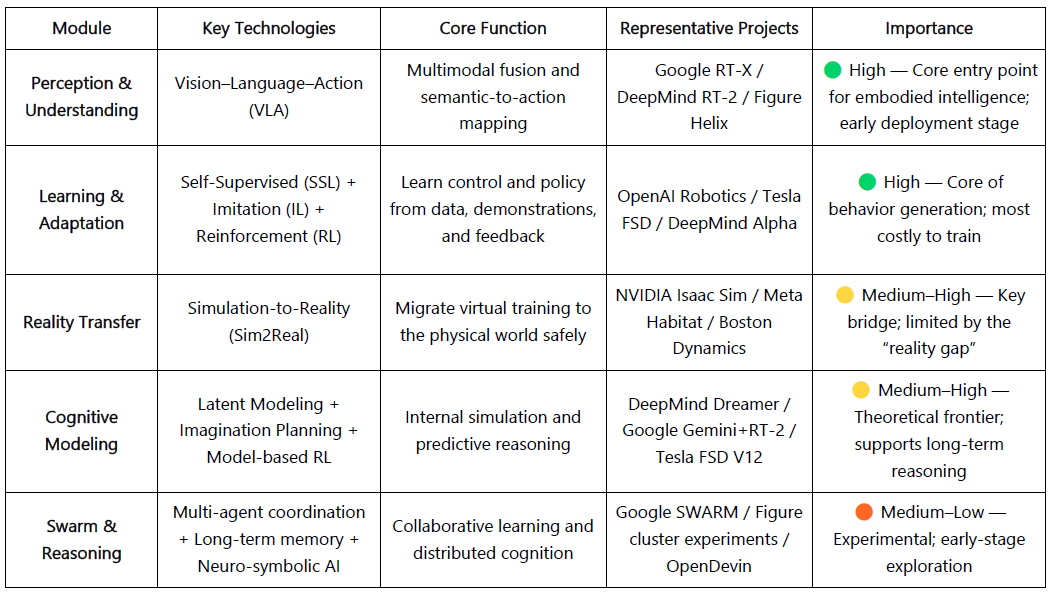
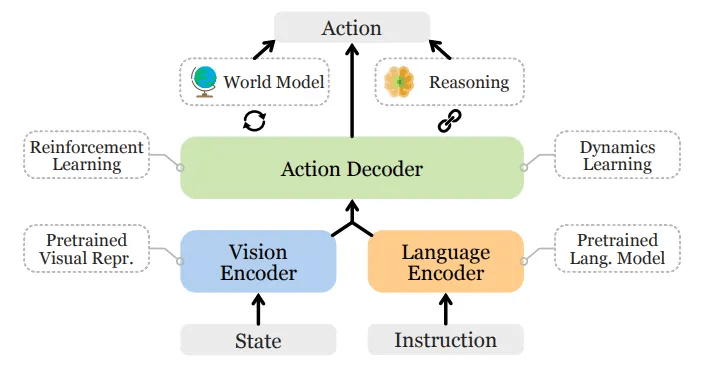
Восприятие и Понимание: Видение–Язык–Действие (VLA)
Модель VLA интегрирует Видение, Язык и Действие в единое мультимодальное систему, позволяя роботам понимать человеческие инструкции и переводить их в физические операции. Исполнительный конвейер включает семантический парсинг, обнаружение объектов, планирование пути и выполнение действий, завершая полный цикл "понимать семантику → воспринимать мир → завершать задачу." Представительные проекты: Google RT-X, Meta Ego-Exo и Figure Helix, демонстрирующие прорывы в мультимодальном понимании, погружающем восприятии и управлении, обусловленном языком.
Системы VLA все еще находятся на ранней стадии и сталкиваются с четырьмя основными узкими местами:
Семантическая неоднозначность и слабая обобщаемость задач: модели испытывают трудности в интерпретации неопределенных или открытых инструкций;
Нестабильное выравнивание видения и действия: ошибки восприятия усиливаются в процессе планирования и выполнения;
Разреженные и нестандартизированные мультимодальные данные: сбор и аннотирование остаются дорогими, что затрудняет создание крупных потоков данных;
Долгосрочные проблемы по временным и пространственным осям: длинные временные горизонты затрудняют планирование и память, в то время как большие пространственные горизонты требуют рассуждений о элементах вне восприятия — чего текущие VLA лишены из-за ограниченных мировых моделей и кросс-пространственной интерференции.
Эти проблемы в совокупности ограничивают кросс-сценарную генерализацию VLA и ограничивают его готовность к крупномасштабному развертыванию в реальном мире.
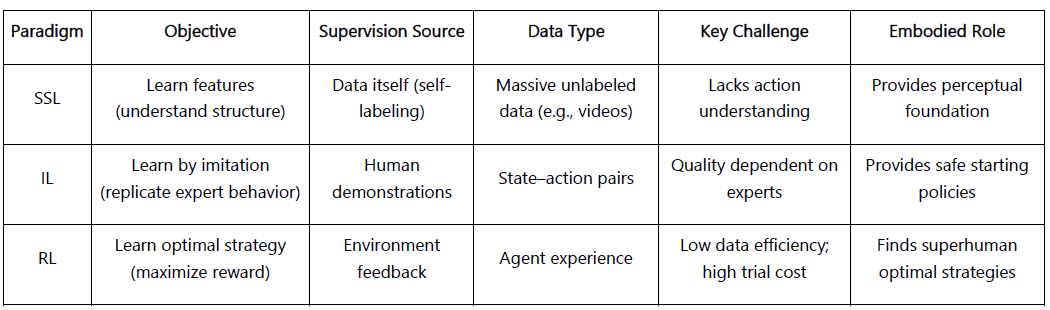
Обучение и Адаптация: SSL, IL и RL
Обучение с Самонаблюдением (SSL): Позволяет роботам делать выводы о закономерностях и физических законах непосредственно из данных восприятия — обучая их "понимать мир."
Обучение Имитации (IL): Позволяет роботам подражать действиям человека или экспертов — помогая им "действовать как люди."
Обучение с Подкреплением (RL): Использует циклы обратной связи награда-штраф для оптимизации политик — помогая им "учиться на пробах и ошибках."
В Эмбеддед AI эти парадигмы формируют многослойную обучающую систему: SSL предоставляет репрезентативную основу, IL предоставляет человеческие приоритеты, а RL управляет оптимизацией политики.
совместно формируя основной механизм обучения от восприятия к действию.
Sim2Real: Соединение Симуляции и Реальности
Симуляция в Реальность (Sim2Real) позволяет роботам обучаться в виртуальных средах перед развертыванием в реальном мире. Платформы, такие как NVIDIA Isaac Sim, Omniverse и DeepMind MuJoCo, производят огромные объемы синтетических данных — снижая затраты и износ оборудования.
Цель — минимизировать "разрыв реальности" через:
Случайная Доменизация: Случайное изменение освещения, трения и шума для улучшения генерализации.
Физическая Калибровка: Использование реальных данных сенсоров для корректировки физики симуляции для реалистичности.
Адаптивная Тонкая Настройка: Быстрое переобучение на месте для стабильности в реальных условиях.
Sim2Real формирует центральный мост для развертывания эмбеддед AI. Несмотря на сильный прогресс, остаются проблемы вокруг разрыва реальности, затрат на вычисления и безопасности в реальном мире. Тем не менее, Simulation-as-a-Service (SimaaS) появляется как легкая, но стратегическая инфраструктура для эры Эмбеддед AI — через модели бизнеса PaaS (Подписка на Платформу), DaaS (Генерация Данных) и VaaS (Валидация).
Когнитивное Моделирование: Мировая Модель — "Внутренний мир" робота
Мировая Модель служит внутренним мозгом роботов, позволяя им симулировать окружающую среду и результаты внутренне — предсказывая и рассуждая перед действием. Обучаясь динамике окружающей среды, она позволяет предсказуемому и проактивному поведению. Представительные проекты: DeepMind Dreamer, Google Gemini + RT-2, Tesla FSD V12, NVIDIA WorldSim.
Основные техники включают:
Моделирование Латентной Динамики: Сжатие высокоразмерных наблюдений в латентные состояния.
Планирование на основе Воображения: Виртуальные пробные попытки для предсказания пути.
Обучение с Подкреплением на основе Моделей: Замена реальных испытаний внутренними симуляциями.
Мировые Модели отмечают переход от реактивного к предсказательному интеллекту, хотя остаются проблемы с сложностью модели, стабильностью на длинных горизонтах и стандартизацией.
Интеллект Роя и Рассуждения: От Индивидуального к Коллективному Познанию
Системы Многоагентного Сотрудничества и Память-Рассуждение представляют собой следующий фронт — расширяя интеллект от индивидуальных агентов до кооперативных и когнитивных коллективов.
Многоагентные Системы (MAS): Позволяют распределенное сотрудничество между несколькими роботами через кооперативные RL-рамки (например, OpenAI Hide-and-Seek, DeepMind QMIX / MADDPG). Эти методы оказались эффективными в логистике, инспекции и координированном управлении роем.
Память и Рассуждение: Оснащение агентов долговременной памятью и причинным пониманием — ключевыми для обобщаемости между задачами и самостоятельного планирования. Примеры исследований включают DeepMind Gato, Dreamer и Voyager, позволяющие непрерывное обучение и "воспоминание о прошлом, моделирование будущего."
Вместе эти компоненты закладывают основу для роботов, способных к коллективному обучению, памяти и самовоспроизводству.
Глобальный пейзаж Эмбеддед AI: Сотрудничество и Конкуренция
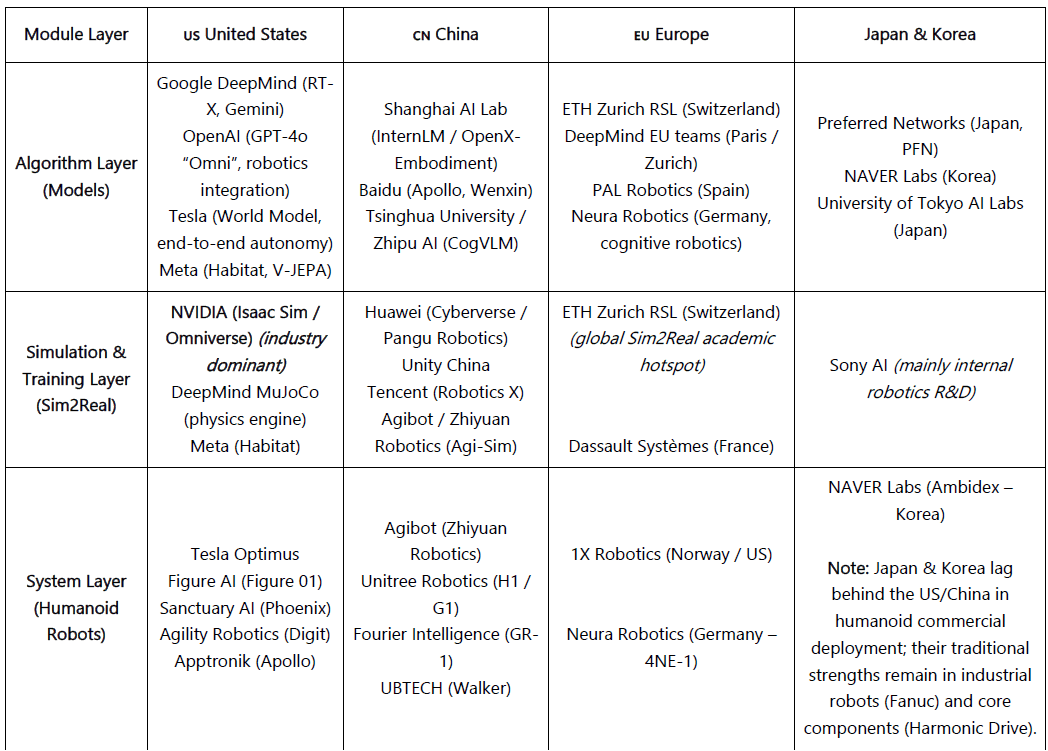
Глобальная индустрия робототехники входит в эпоху кооперативной конкуренции.
Китай лидирует в эффективности цепочки поставок, производстве и вертикальной интеграции, при этом компании, такие как Unitree и UBTECH, уже массово производят гуманоидов. Тем не менее, его алгоритмические и симуляционные возможности все еще отстают от США на несколько лет.
США доминируют в моделях и программном обеспечении передового AI (DeepMind, OpenAI, NVIDIA), но это преимущество не полностью распространяется на аппаратное обеспечение робототехники, где китайские игроки часто итеративно быстрее и демонстрируют более сильные результаты в реальном мире. Этот разрыв в аппаратном обеспечении отчасти объясняет усилия по возвращению промышленности в США в рамках Закона CHIPS и IRA.
Япония остается мировым лидером в области прецизионных компонентов и систем управления движением, хотя ее прогресс в робототехнике, основанной на AI, остается консервативным.
Корея выделяется за счет передового принятия потребительской робототехники, обусловленного LG, NAVER Labs и зрелой экосистемой сервисных роботов.
Европа сохраняет сильную инженерную культуру, стандарты безопасности и глубину исследований; хотя значительная часть производства переместилась за границу, Европа продолжает преуспевать в рамках сотрудничества и стандартизации робототехники.
Вместе эти региональные сильные стороны формируют долгосрочное равновесие глобальной индустрии эмбеддед интеллекта.
III. Роботы × AI × Web3: Наративное Видение против Практических Путей
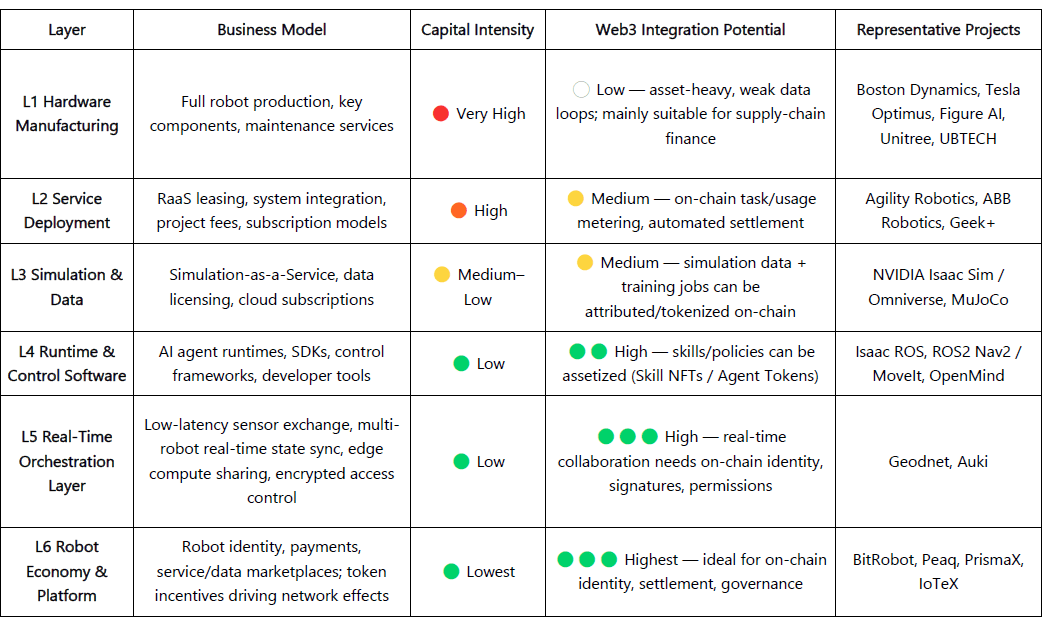
В 2025 году появился новый нарратив в Web3 вокруг слияния робототехники и AI. Хотя Web3 часто рассматривается как базовый протокол для децентрализованной машинной экономики, его реальная интеграционная ценность и осуществимость значительно различаются по слоям:
Производство аппаратного обеспечения и сервисный слой: капиталоемкие с слабыми потоками данных; Web3 может в настоящее время играть только вспомогательную роль в краевых случаях, таких как финансирование цепочки поставок или аренда оборудования.
Экосистема симуляции и программного обеспечения: более высокая совместимость; данные симуляции и задачи обучения могут быть выложены on-chain для атрибуции, а агенты/модули навыков могут быть токенизированы через NFT или Токены Агентов.
Платформенный слой: децентрализованные рынки труда и сотрудничества показывают наибольший потенциал — Web3 может объединить идентичность, стимулы и управление, чтобы постепенно построить надежный "рынок труда машин", основанный на институциональных основах для будущей машинной экономики.
Долгосрочная перспектива. Слой Оркестрации и Платформы является самым ценным направлением для интеграции Web3 с робототехникой и AI. Поскольку роботы приобретают способности восприятия, языка и обучения, они эволюционируют в интеллектуальные агенты, которые могут автономно принимать решения, сотрудничать и создавать экономическую ценность. Для того чтобы эти "интеллектуальные работники" могли действительно участвовать в экономике, необходимо преодолеть четыре основных препятствия: идентичность, доверие, стимулы и управление.
Идентичность: Машины требуют атрибутируемых, прослеживаемых цифровых идентичностей. С помощью ДИД машин, каждый робот, сенсор или БПЛА может создать уникальную проверяемую on-chain "ID-карту", связывая собственность, журналы активности и области разрешений для обеспечения безопасного взаимодействия и ответственности.
Доверие: "Машинный труд" должен быть проверяемым, измеримым и ценным. Используя смарт-контракты, оракулы и аудит — в сочетании с Доказательством Физической Работы (PoPW), Доверенными Исполнительными Средами (TEE) и Доказательствами с Нулевым Знанием (ZKP) — выполнение задач может быть доказано подлинным и отслеживаемым, придавая поведение машин оценочную ценность.
Стимулы: Web3 позволяет автоматизированное расчет и поток ценности между машинами через токеновые стимулы, абстракцию учетной записи и каналы состояния. Роботы могут использовать микроплатежи для аренды вычислительных ресурсов и обмена данными, с ставками/штрафами для обеспечения производительности; смарт-контракты и оракулы могут координировать децентрализованный рынок координации машин с минимальным человеческим вмешательством.
Управление: Поскольку машины приобретают долгосрочную автономию, Web3 предоставляет прозрачное, программируемое управление: DAO совместно решают параметры системы; мультиподписи и репутация поддерживают безопасность и порядок. Со временем это движется к алгоритмическому управлению — люди устанавливают цели и рамки, в то время как контракты регулируют стимулы и проверки между машинами.
Конечное видение Web3 × Робототехника: сеть реальной оценки — распределенные роботизированные флоты, действующие как "физические двигатели вывода", чтобы постоянно тестировать и оценивать производительность моделей в различных сложных средах; и рабочая сила роботов — роботы, выполняющие проверяемые физические задачи по всему миру, рассчитывающиеся on-chain и реинвестирующие ценность в вычисления или обновления оборудования.
Практический путь сегодня. Слияние эмбеддед интеллекта и Web3 остается на ранней стадии; децентрализованные экономики машинного интеллекта в значительной степени управляются нарративами и сообществом. Жизнеспособные краткосрочные пересечения сосредоточены на трех областях:
Краудсорсинг данных и атрибуция — on-chain стимулы и прослеживаемость побуждают участников загружать реальные данные.
Глобальное участие в длинном хвосте — трансграничные микроплатежи и микростимулы снижают стоимость сбора и распределения данных.
Финансирование и совместные инновации — структуры DAO могут обеспечивать токенизацию активов роботов, токенизацию доходов и расчет между машинами.
В целом, интеграция робототехники и Web3 будет развиваться поэтапно: в краткосрочной перспективе акцент будет сделан на сбор данных и механизмы стимулов; в среднем сроке ожидаются прорывы в платежах на основе стейблкоинов, агрегации данных длинного хвоста и токенизации и расчетах моделей RaaS; и в долгосрочной перспективе, по мере масштабирования гуманоидов, Web3 может эволюционировать в институциональную основу для владения машинами, распределения доходов и управления, что позволит создать действительно децентрализованную машинную экономику.
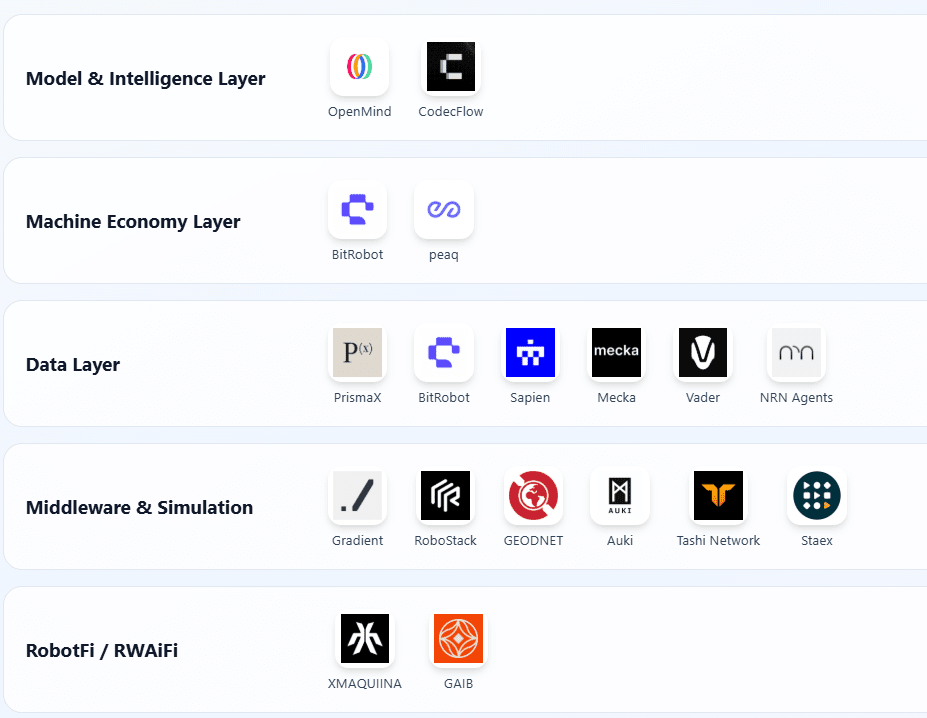
IV. Пейзаж Робототехники Web3 и Кураторские Кейсы
На основе трех критериев — проверяемого прогресса, технической открытости и промышленной актуальности — этот раздел отображает представительные проекты на пересечении Web3 × Робототехника, организованные по пяти слоям: Модель и Интеллект, Машинная Экономика, Сбор Данных, Восприятие и Инфраструктура Симуляции, и Роботизированные Активы и Доход (RobotFi / RWAiFi). Чтобы оставаться объективными, мы убрали очевидные проекты, основанные на хайпе, или недостаточно задокументированные проекты; пожалуйста, укажите любые упущения.
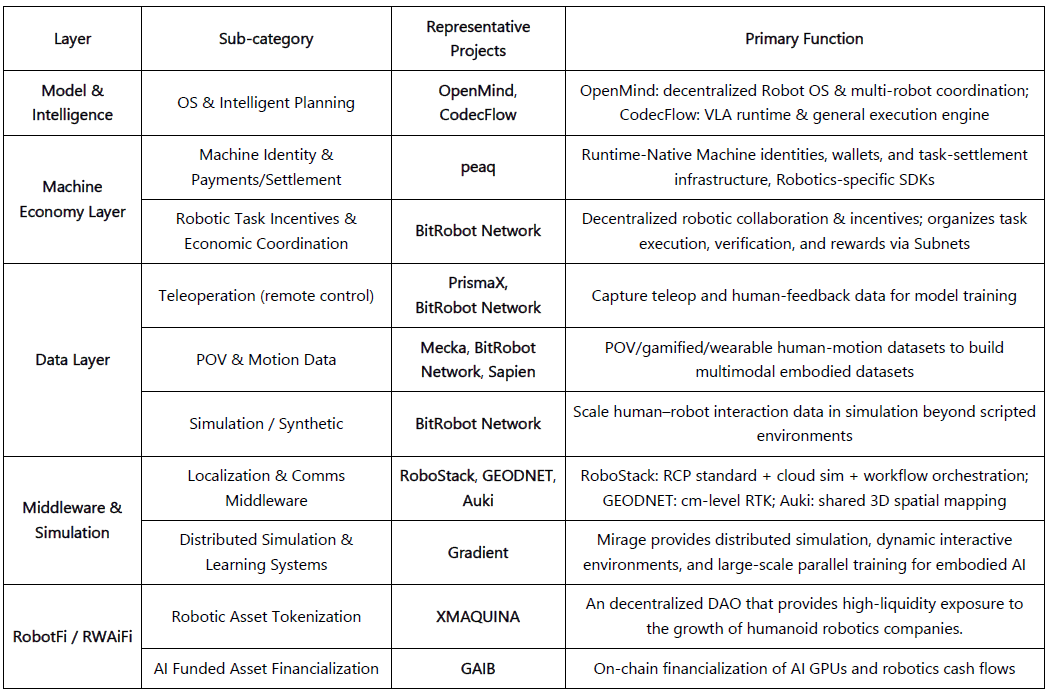
Модель и слой интеллекта
OpenMind — Создание андроида для роботов (https://openmind.org/)
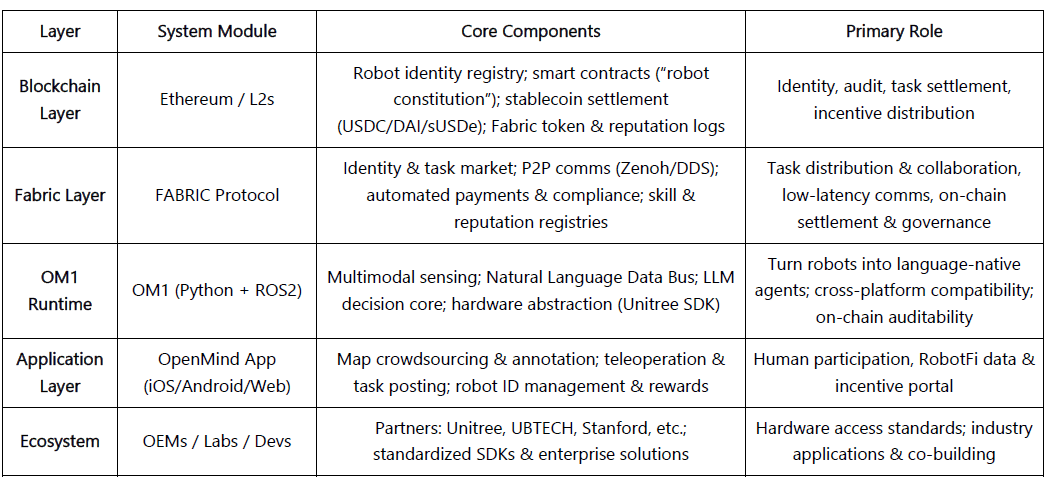
OpenMind — это операционная система робота с открытым исходным кодом для Эмбеддед AI и управления, нацеленная на создание первой децентрализованной платформы выполнения и разработки для роботов. Два основных компонента:
OM1: Модульный, открытый слой выполнения AI-агентов, построенный на основе ROS2, оркеструющий восприятие, планирование и конвейеры действий как для цифровых, так и для физических роботов.
FABRIC: Распределенный координационный слой, соединяющий облачные вычисления, модели и реальные роботы, чтобы разработчики могли управлять/обучать роботов в единой среде.
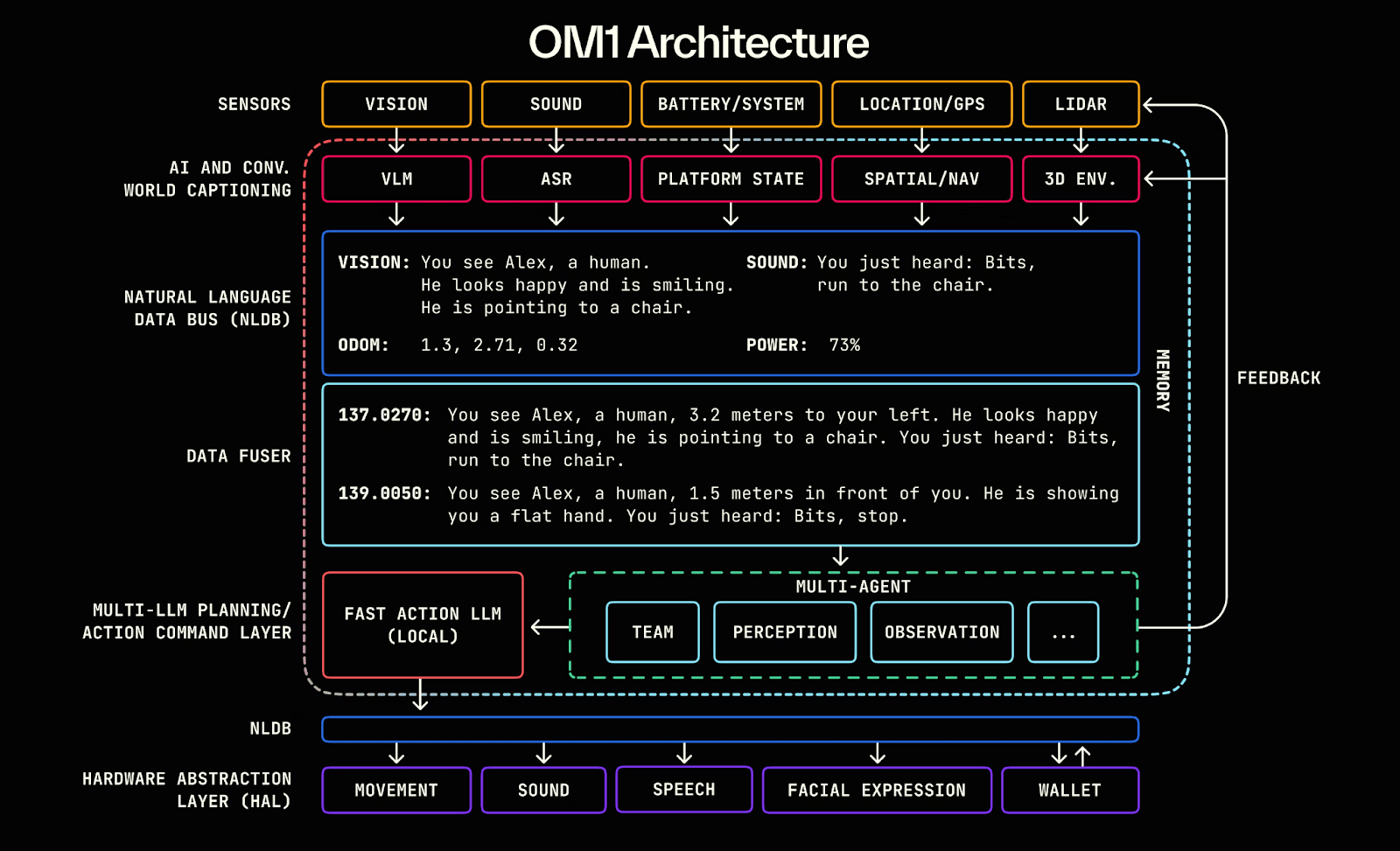
OpenMind действует как интеллектуальный middleware между LLM и миром робототехники — превращая языковой интеллект в эмбеддед интеллект и предоставляя каркас от понимания (Язык → Действие) до согласования (Блокчейн → Правила). Его многослойная система формирует полный цикл сотрудничества: люди предоставляют обратную связь/метки через приложение OpenMind (данные RLHF); Сеть Fabric управляет идентичностью, распределением задач и расчетами; роботы OM1 выполняют задачи и соответствуют on-chain "конституции роботов" для аудита поведения и платежей — завершая децентрализованный цикл человеческой обратной связи → сотрудничества по задачам → on-chain расчет.
Прогресс и оценка. OpenMind находится на ранней стадии "технически работающего, коммерчески непроверенного" этапа. OM1 Runtime находится в открытом доступе на GitHub с мультимодальными входами и NL автобусом данных для парсинга языка в действие — оригинально, но экспериментально. Fabric и on-chain расчет пока являются интерфейсными дизайнами. Связи в экосистеме включают Unitree, UBTECH, TurtleBot и университеты (Стенфорд, Оксфорд, Сеульская робототехника) для образования/исследований; промышленные внедрения еще не начались. Приложение находится в бета-версии; стимулы/задачи находятся на ранней стадии.
Бизнес-модель: OM1 (с открытым исходным кодом) + Fabric (расчет) + Рынок навыков (стимулы). Пока нет доходов; полагается на раннее финансирование на ~$20M (Pantera, Coinbase Ventures, DCG). Технически амбициозен с длинным путем и зависимостью от аппаратного обеспечения; если Fabric пройдет, это может стать "Андроидом Эмбеддед AI."
CodecFlow — Исполнительный механизм для робототехники (https://codecflow.ai)
CodecFlow — это децентрализованный Исполнительный Слой для Робототехники на Solana, предоставляющий среды выполнения по запросу для AI-агентов и робототехнических систем — давая каждому агенту "Мгновенную Машину". Три модуля:
Fabric: агрегатор вычислений DePIN для облачных и межоблачных систем (Weaver + Shuttle + Gauge), который развертывает безопасные виртуальные машины, контейнеры GPU или узлы управления роботами за секунды.
optr SDK: Python-рамка, которая абстрагирует аппаратные соединения, алгоритмы обучения и интеграцию блокчейна. Для создания "Операторов", которые управляют рабочими столами, симуляциями или реальными роботами.
Токеновые Стимулы: On-chain стимулы для открытых источников, выкуп из дохода и будущая экономика для рынка
Цель: Объединить фрагментированную экосистему робототехники с единственным слоем выполнения, который дает строителям абстракцию оборудования, инструменты для тонкой настройки, облачную инфраструктуру симуляции и onchain экономику, чтобы они могли запускать и масштабировать операторы, генерирующие доход для роботов и настольных ПК.
Прогресс и оценка. Ранний Fabric (Go) и optr SDK (Python) активны; веб/CLI могут запускать изолированные вычислительные экземпляры, интеграция с NRN, ChainLink, peaq. Рынок операторов нацелен на конец 2025 года, обслуживая разработчиков AI, лаборатории робототехники и операторов автоматизации.

Слой Машинной Экономики
BitRobot — Открытая Робототехническая Лаборатория Мира (https://bitrobot.ai)
Децентрализованная сеть исследований и сотрудничества для Эмбеддед AI и робототехники, совместно инициированная FrodoBots Labs и Protocol Labs. Видение: открытая архитектура Подсетей + Стимулы + Проверяемая Роботизированная Работа (VRW).
VRW: Определение и проверка реального вклада каждой роботизированной задачи.
ENT (Токен Эмбеддед Узла): on-chain идентичность робота и экономическая ответственность.
Подсети: Организация межрегионального сотрудничества в области исследований, вычислений, устройств и операторов.
Сенат + Gandalf AI: Совместное управление людьми и AI для стимулов и распределения исследований.
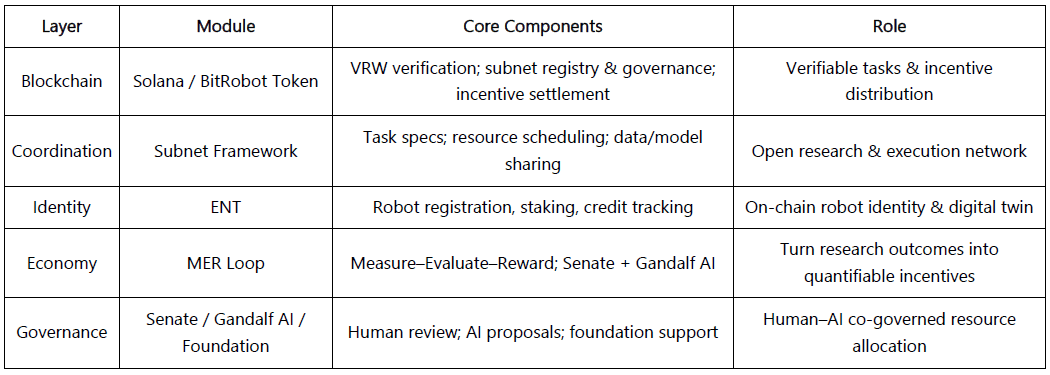
С момента своего белого документа 2025 года, BitRobot запустил несколько подсетей (например, SN/01 ET Fugi, SN/05 SeeSaw от Virtuals), обеспечив децентрализованную телеоперацию и захват данных из реального мира, и запустил фонд Grand Challenges на сумму 5 миллионов долларов для стимулирования глобальных исследований по разработке моделей.
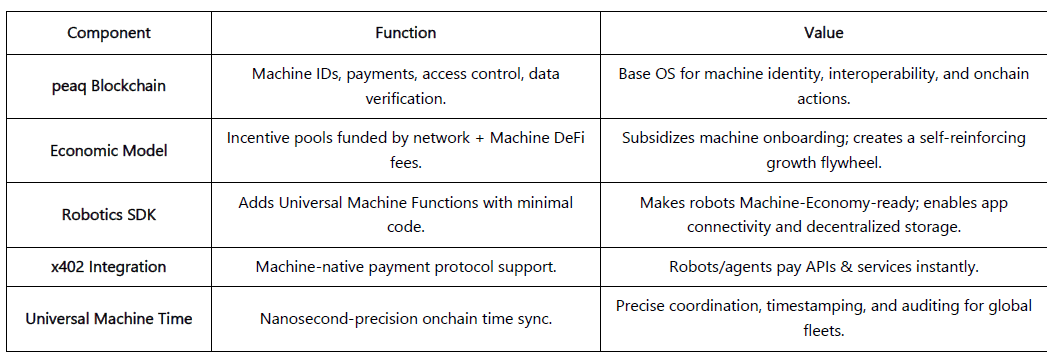
peaq — Компьютер Машинной Экономики (https://www.peaq.xyz/)
peaq — это цепочка Layer-1, построенная для Машинной Экономики, предоставляющая идентификации машин, кошельки, контроль доступа и синхронизацию времени (Универсальное машинное время) для миллионов роботов и устройств. Его Robotics SDK позволяет разработчикам делать роботов "готовыми к Машинной Экономике" всего лишь несколькими строками кода, обеспечивая независимую совместимость и взаимодействие равноправных участников.
Сеть уже хостит первую в мире токенизированную роботизированную ферму и более 60 реальных машинных приложений. Токенизационная структура peaq позволяет компаниям в области робототехники привлекать ликвидность для капиталоемкого оборудования и расширять участие за пределами традиционных покупателей B2B/B2C. Его пул стимулов на уровне протокола, финансируемый сетевыми сборами, субсидирует ввод машин и поддерживает строителей — создавая рост для проектов в области робототехники.
Слой данных
Цель: разблокировать редкие, дорогие реальные данные для обучения эмбеддед через телеоперацию (PrismaX, BitRobot Network), захват движения с первого лица и (Mecka, BitRobot Network, Sapien, Vader, NRN), и симуляцию/синтетические трубопроводы (BitRobot Network) для создания масштабируемых, обобщаемых обучающих корпусов.
Примечание: Web3 не производит данные лучше, чем гиганты Web2; его ценность заключается в перераспределении экономики данных. С помощью стейблкоинов + краудсорсинга, разрешительные стимулы и on-chain атрибуция позволяют осуществлять недорогие микро-распределения, происхождение и автоматическое распределение доходов. Открытый краудсорсинг все еще сталкивается с проблемами контроля качества и дефицитом спроса со стороны покупателей.
PrismaX (https://gateway.prismax.ai)
Децентрализованная телеоперация и экономика данных для Эмбеддед AI — нацеленная на создание глобального рынка труда для роботов, где человеческие операторы, роботы и модели AI развиваются вместе через on-chain стимулы.
Стек телеоперации: Интерфейс браузера/VR + SDK соединяет глобальные руки/сервисные роботы для управления в реальном времени и захвата данных.
Eval Engine: CLIP + DINOv2 + оптический поток семантического оценивания для оценки каждой траектории и улаживания on-chain.
Завершает цикл телеоперация → захват данных → обучение моделей → on-chain расчет, превращая человеческий труд в активы данных.
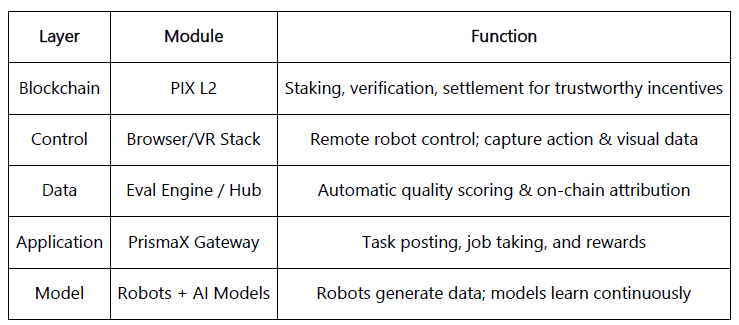
Прогресс и оценка. Тестовая сеть активна с августа 2025 года (gateway.prismax.ai). Пользователи могут телеоперировать руки для захвата задач и генерировать данные для обучения. Eval Engine работает внутренне. Четкая позиционирование и высокая техническая полнота; сильный кандидат для децентрализованного протокола труда и данных для эры эмбеддед, но краткосрочный масштаб остается проблемой.
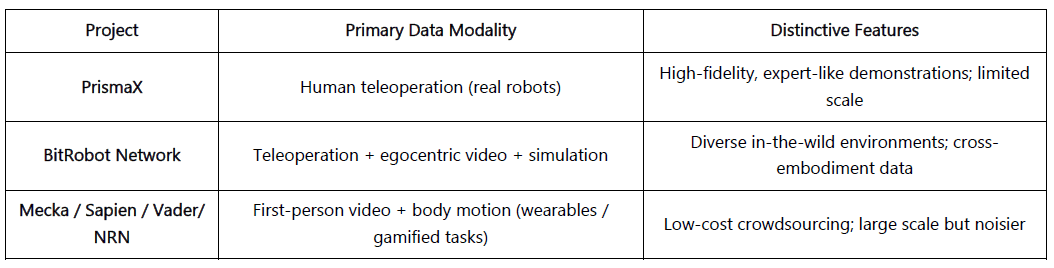
BitRobot Network (https://bitrobot.ai/)
Подсети BitRobot Network питают сбор данных по видео, телеоперации и симуляции. С SN/01 ET Fugi пользователи удаленно управляют роботами для выполнения задач, собирая данные о навигации и восприятии в "реальной игре Pokemon Go". Игра привела к созданию FrodoBots-2K, одной из крупнейших открытых баз данных навигации человека-робота, используемой UC Berkeley RAIL и Google DeepMind. SN/05 SeeSaw краудсорсит данные эгоцентрического видео через iPhone из реальных условий в масштабах. Другие анонсированные подсети RoboCap и Rayvo сосредоточены на сборе данных эгоцентрического видео через недорогие воплощения.
Mecka (https://www.mecka.ai)
Mecka — это компания по сбору данных о робототехнике, которая краудсорсит эгоцентрические видео, движения и демонстрации задач — через игрофицированный мобильный захват и специальные аппаратные платформы — для создания крупномасштабных многомодальных наборов данных для обучения эмбеддед AI.
Sapien (https://www.sapien.io/)
Платформа краудсорсинга для данных о движении человека для поддержки интеллекта роботов. С помощью носимых устройств и мобильных приложений, Sapien собирает данные о позах и взаимодействиях человека для обучения эмбеддед моделей — создавая глобальную сеть данных о движении.
Vader (https://www.vaderai.ai)
Vader краудсорсит эгоцентрические видео и демонстрации задач через EgoPlay, реальный MMO, где пользователи записывают повседневные действия с первого лица и зарабатывают $VADER. Его ORN конвейер преобразует сырые POV видеозаписи в защищенные от конфиденциальности структурированные наборы данных, обогащенные метками действий и семантическими нарративами — оптимизированными для обучения политике гуманоидов.
Агенты NRN (https://www.nrnagents.ai/)
Игрофицированная платформа данных для эмбеддед-RL, которая собирает примеры действий человека через управление роботами на базе браузера и смоделированные соревнования. NRN генерирует длинные поведенческие траектории для обучения имитации и непрерывного RL, используя спортивные задачи как масштабируемые данные для обучения политике с симуляции на реальность.
Сравнение сбора данных Эмбеддед — Проект
Middleware и Симуляция
Слой Middleware и Simulation формирует основу между физическим восприятием и интеллектуальным принятием решений, охватывая локализацию, коммуникацию, пространственное картирование и масштабное моделирование. Поле все еще на ранней стадии: проекты исследуют высокоточные позиции, совместные пространственные вычисления, стандартизацию протоколов и распределенное моделирование, но пока не появился единый стандарт или совместимая экосистема.
Middleware и Пространственная Инфраструктура
Основные способности роботов — навигация, локализация, связь и пространственное картирование — формируют мост между физическим миром и интеллектуальным принятием решений. Хотя более широкие проекты DePIN (Silencio, WeatherXM, DIMO) теперь упоминают "робототехнику", проекты ниже являются наиболее непосредственно связанными с эмбеддед AI.
RoboStack — Облачный нативный стек управления роботами (https://robostack.io)
Облачная операционная система и управленческий стек для роботов, интегрирующий ROS2, DDS, и облачные вычисления. Его RCP (Протокол Управления Роботами) направлен на то, чтобы сделать роботов вызываемыми/оркеструемыми как облачные услуги.GEODNET — Децентрализованная GNSS Сеть (https://geodnet.com)
Глобальная децентрализованная спутниковая сеть позиционирования, предлагающая см-уровень RTK/GNSS. С распределенными базовыми станциями и on-chain стимулами, она предоставляет высокоточное позиционирование для дронов, автономного вождения и роботов — становясь Гео-Инфраструктурным Слоем машинной экономики.Auki — Posemesh для пространственных вычислений (https://www.auki.com)
Децентрализованная Posemesh сеть, которая генерирует общие карты в реальном времени 3D с помощью краудсорсинговых сенсоров и вычислений, позволяя AR, навигацию роботов и многоприборное сотрудничество — ключевая инфраструктура, объединяющая AR × Робототехнику.Сеть Tashi — Координация Меш-сети в реальном времени для роботов (https://tashi.network)
Децентрализованная меш-сеть, позволяющая консенсус менее 30мс, обмен сенсорами с низкой задержкой и синхронизацию состояния нескольких роботов. Ее SDK MeshNet поддерживает совместное SLAM, координацию роя и надежные обновления карты для эмбеддед AI в реальном времени.Staex — Децентрализованная Связь и Телеметрия (https://www.staex.io)
Децентрализованный слой связи и управления устройствами от Deutsche Telekom R&D, обеспечивающий безопасную коммуникацию, доверенную телеметрию и маршрутизацию устройств в облако. Staex позволяет флотам роботов надежно обмениваться данными и взаимодействовать с операторами.
Распределенные Симуляции и Системы Обучения
Градиент — к открытому интеллекту (https://gradient.network/)
Gradient — это AI R&D лаборатория, посвященная созданию Открытого Интеллекта, обеспечивающего распределенное обучение, вывод, валидацию и симуляцию на децентрализованной инфраструктуре. Его текущий стек технологий включает Parallax (распределенный вывод), Echo (распределенное обучение с подкреплением и обучение многоагентных систем) и Gradient Cloud (AI решения для предприятий).
В робототехнике Gradient разрабатывает Mirage — распределенную платформу симуляции и обучения роботов, предназначенную для создания обобщаемых мировых моделей и универсальных политик, поддерживающую динамические интерактивные среды и параллельное обучение в большом масштабе. Ожидается, что Mirage скоро выпустит свою структуру и модель, и команда ведет обсуждения с NVIDIA относительно потенциального сотрудничества.
Роботизированные Активы и Доходы (RobotFi / RWAiFi)
Этот слой преобразует роботов из продуктивных инструментов в финансово обесцененные активы через токенизацию, распределение доходов и децентрализованное управление, формируя финансовую инфраструктуру машинной экономики.
XmaquinaDAO — Физический AI DAO (https://www.xmaquina.io)
XMAQUINA — это децентрализованная экосистема, предоставляющая глобальное, ликвидное воздействие на ведущие частные компании в области гуманоидной робототехники и эмбеддед-AI — принося традиционно доступные только венчурные возможности в onchain. Его токен DEUS функционирует как ликвидный индекс и актив управления, координируя распределение казны и рост экосистемы. Портал DAO и Лаунчпад Машинной Экономики позволяют сообществу совместно владеть и поддерживать новые предприятия Физического AI через токенизированные машинные активы и структурированное участие в onchain.
GAIB — Экономический Слой для Инфраструктуры AI (https://gaib.ai/)
GAIB предоставляет единый Экономический Слой для реальной инфраструктуры AI, такой как GPU и роботы, соединяя децентрализованный капитал с продуктивными активами AI и делая доходы проверяемыми, составными и on-chain.
Для робототехники GAIB не "продает токены роботов." Вместо этого он финансирует оборудование роботов и операционные контракты (RaaS, сбор данных, телеоперация) on-chain — преобразуя реальные денежные потоки → составные on-chain активы дохода. Это охватывает финансирование оборудования (аренда/залог), операционные денежные потоки (услуги RaaS/данные) и доходы от прав на данные (лицензирование/контракты), делая активы роботов и их доходы измеримыми, ценными и торгуемыми.
GAIB использует AID / sAID в качестве носителей расчетов/доходов, обеспеченных структурированными рисковыми контролями (избыточное обеспечение, резервы, страховка). Со временем он интегрируется с DeFi деривативами и ликвидными рынками, чтобы закрыть цикл от "роботизированных активов" до "составных активов дохода." Цель: стать экономическим фундаментом интеллекта в эпоху AI.
Ссылка на стек Web3 робототехники: https://fairy-build-97286531.figma.site/
V. Заключение: Настоящие Проблемы и Долгосрочные Возможности
С долгосрочной точки зрения, слияние Робототехники × AI × Web3 нацелено на создание децентрализованной машинной экономики (DeRobot Economy), перемещая эмбеддед интеллект от "автоматизации одиночной машины" к сетевому сотрудничеству, которое может быть собственным, разрешимым и управляемым. Основная логика — это самоподдерживающийся круг — "Токен → Развертывание → Данные → Перераспределение Ценности" — через который роботы, сенсоры и вычислительные узлы получают on-chain владение, транзакции и делят доходы.
Сказав это, на сегодняшнем этапе эта парадигма остается на ранней стадии исследования, все еще далеко от стабильных денежных потоков и масштабируемого коммерческого колеса. Многие проекты основаны на нарративах с ограниченным реальным внедрением. Производство и операции в робототехнике капиталоемкие; токеновые стимулы сами по себе не могут финансировать расширение инфраструктуры. Хотя on-chain финансы совместимы, они пока не решили проблему ценообразования рисков реальных активов и реализации денежных потоков. Короче говоря, "самоподдерживающаяся сеть машин" остается идеализированной, а ее бизнес-модель требует проверки в реальном мире.
Слой Модели и Интеллекта. Это самое ценное долгосрочное направление. Открытые операционные системы роботов, представленные OpenMind, стремятся разорвать закрытые экосистемы и объединить многороботную координацию с интерфейсами язык-действие. Техническое видение ясно и системно полно, но инженерная нагрузка огромна, циклы валидации длинные, и положительная обратная связь на уровне отрасли еще не сформировалась.
Слой Машинной Экономики. Все еще на стадии до рынка: реальная база роботов мала, и сети идентичности на основе ДИД и стимулов испытывают трудности в формировании самосогласованного цикла. Мы еще далеки от настоящей "экономики машинного труда." Только после того, как эмбеддед системы будут развернуты на большом масштабе, экономические эффекты on-chain идентичности, расчетов и сетей сотрудничества станут очевидными.
Слой Данных. Барьеры относительно ниже — и это наиболее близко к коммерческой жизнеспособности сегодня. Сбор данных эмбеддед требует пространственно-временной непрерывности и высокоточных семантических действий, которые определяют качество и повторное использование. Балансировка масштабов толпы с надежностью данных является основной задачей. PrismaX предлагает частично воспроизводимый шаблон, сначала фиксируя спрос со стороны B, а затем распределяя задачи захвата/валидации, но масштаб экосистемы и рынки данных потребуют времени для созревания.
Слой Middleware и Симуляции. Все еще на стадии технической валидации без единых стандартов и ограниченной совместимости. Результаты симуляции трудно стандартизировать для передачи в реальный мир; эффективность Sim2Real остается ограниченной.
Слой RobotFi / RWAiFi. Роль Web3 в основном вспомогательная — улучшение прозрачности, расчетов и эффективности финансирования в финансах цепочки поставок, аренде оборудования и инвестиционном управлении, а не переопределение экономики робототехники самой по себе.
Тем не менее, мы считаем, что пересечение Робототехники × AI × Web3 отмечает отправную точку следующей интеллектуальной экономической системы. Это не только слияние технических парадигм; это также возможность пересмотреть производственные отношения. Как только машины получат идентичность, стимулы и управление, сотрудничество человека и машины может перейти от локализованной автоматизации к сетевой автономии. В краткосрочной перспективе эта область останется движимой нарративами и экспериментами, но формирующиеся институциональные и стимульные структуры закладывают основу для экономического порядка будущего машинного общества. В долгосрочной перспективе комбинация эмбеддед интеллекта с Web3 перекроет границы создания ценности — поднимая интеллектуальные агенты в собственные, совместные, приносящие доход экономические субъекты.
Отказ от ответственности: Эта статья была подготовлена с помощью инструментов AI (ChatGPT-5 и Deepseek). Автор приложил усилия, чтобы проверить и обеспечить точность, но ошибки могут остаться. Обратите внимание, что рынки криптоактивов часто демонстрируют расхождение между основами проекта и ценовым действием на вторичном рынке. Этот контент предназначен только для синтеза информации и академического/исследовательского обмена и не является инвестиционной консультацией или рекомендацией по покупке или продаже какого-либо токена.