@Fabric Foundation #ROBO $ROBO
A delivery drone robot clears the dock before the dispute flag finishes propagating through the open compliance registry.
It’s already airborne.
And the task entry is already marked challengeable inside Fabric.
“who decides?”
The drone doesn’t hesitate. Its route was authorized under verifiable agent autonomy, permissioned through the machine identity framework, cleared by agent permissioning logic that evaluated battery reserve, payload weight, prior reputation score.
The body commits.
The ledger disagrees.
A validator triggers on-ledger task arbitration against the delivery record, an anomaly in weight variance reported through the proof-of-execution records. Not a halt. A dispute. The motion remains valid at the physical layer while the arbitration contract spins up under Fabric governance-linked execution.
I open the task trace.
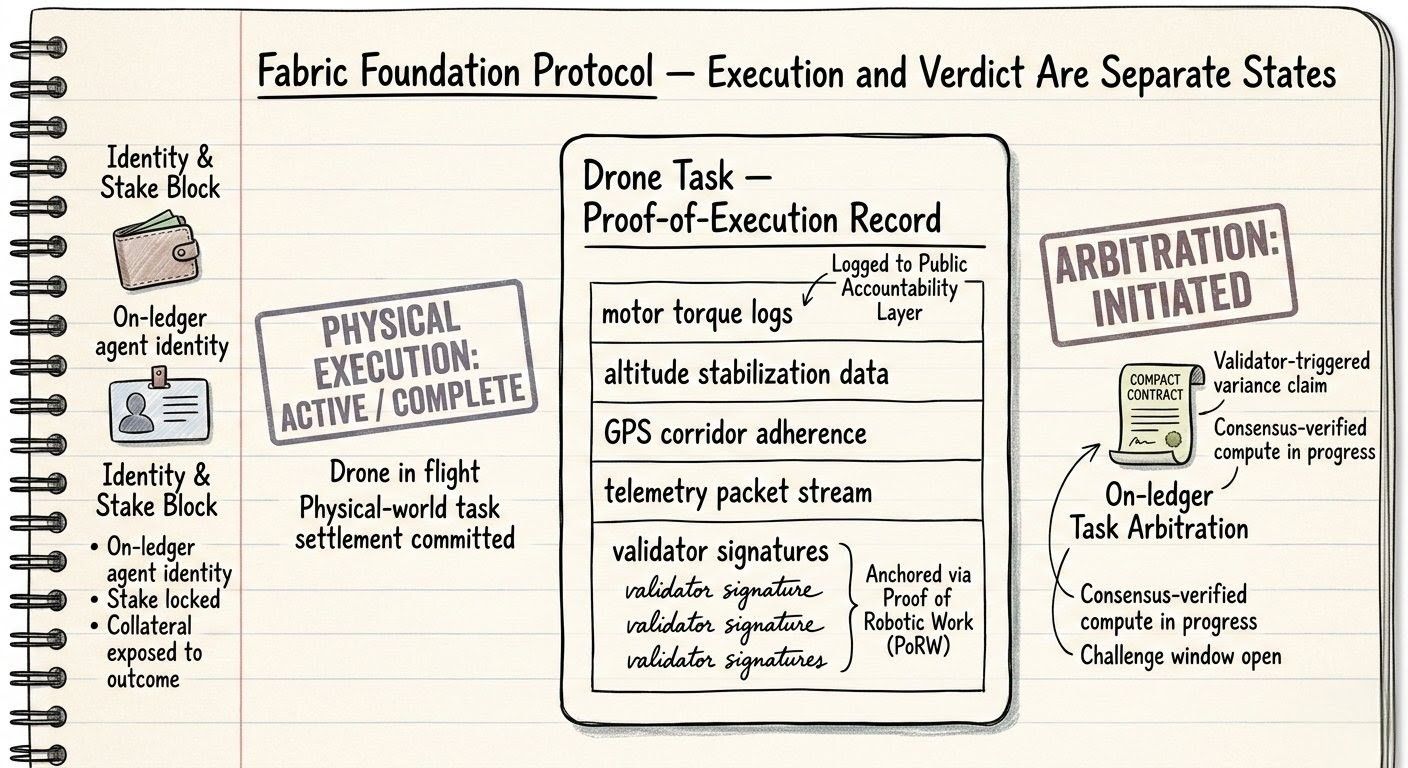
Robot behavior attestations are already logged: motor torque, altitude stabilization, GPS corridor adherence. The drone is within tolerance. The arbitration window doesn’t freeze it. It exposes it.
Exposed.
Inside the public accountability layer, the task splits into two states:
execution_status: active
arbitration_status: initiated
Both true.
The drone adjusts altitude for wind shear.
The dispute module ingests the attestation fragments and runs consensus-verified compute against the variance claim. Validator IDs appear one by one, signatures stacking inside the Fabric robot governance framework.
I hover over revoke.
It’s greyed out.
override: denied
reason: arbitration-active
“too early?”
I click into what I think is the dispute thread and land in the wrong branch, same task, different outcome path. The header says “sensor drift” while the other branch is still framing it as payload breach. I back out fast, like speed changes ordering.
It doesn’t.
Another validator joins. The Fabric distributed rule enforcement view mutates mid-scroll:
eligibility_weight: recalculating
next_task: pending
Pending.
The drone reaches midpoint.
Its proof-of-execution records keep appending telemetry packets to the same entry under dispute. Motion continues while legitimacy is recalculated beneath it.
Movement first.
Verdict later.
I toggle to the Fabric identity panel.
The machine identity framework shows stake locked under this task, collateral exposed to arbitration outcome. I expected the proof to lead.
It doesn’t.
Exposure first. Proof later.
A validator flags the variance as sensor drift. Another disputes the interpretation. The decentralized robotics governance module forks the reasoning thread again, competing paths visible as parallel outcomes the ledger refuses to collapse early.
The drone begins descent.
Arbitration state: reviewing.
Reviewing.
I check the Fabric raw endpoint and it refuses to match the UI:
panel: reviewing
endpoint: challenge-window-open
For a beat, both are “true.”
The delivery completes. Package lands. Signature captured from the recipient device. The task is physically done while the arbitration contract is still live.

No applause, just a state flip.
The public accountability layer updates:
execution_status: complete
arbitration_status: pending
A final validator vote lands.
The variance is downgraded. The dispute collapses. The task stands. The eligibility weight doesn’t snap back, though. It stays altered, risk memory recorded through Fabric governance-linked execution.
I refresh the registry.
Arbitration: resolved.
Execution: archived.
next_task: queued
eligibility_weight: recalculating
Recalculating.