 Introduction
Introduction
When I first came into contact with Fabric Protocol and the operating system OM1, my most intuitive impression was—this is a system about robotic payments. Early articles mainly discussed how robots have digital wallets, receive tokens, and earn rewards by completing tasks. It sounded more like financial technology in the field of automation.
But after deeply reading the technical documentation, developer tutorials, and investor analyses, I gradually realized: payment is just a superficial phenomenon. The deeper goal of Fabric and OM1 is to establish a shared memory system for machines.
In this architecture, robots no longer merely transmit raw sensor data or simple instructions but generate structured, readable reports detailing what they observed, how they judged, and why they took certain actions. Fabric is responsible for verifying these reports, transforming them into trustworthy information that other authorized robots can read and use. This shift from 'transmitting data' to 'sharing verified understanding' may redefine the organization of machine intelligence.
From perception to structured thinking: How OM1 organizes machine intelligence
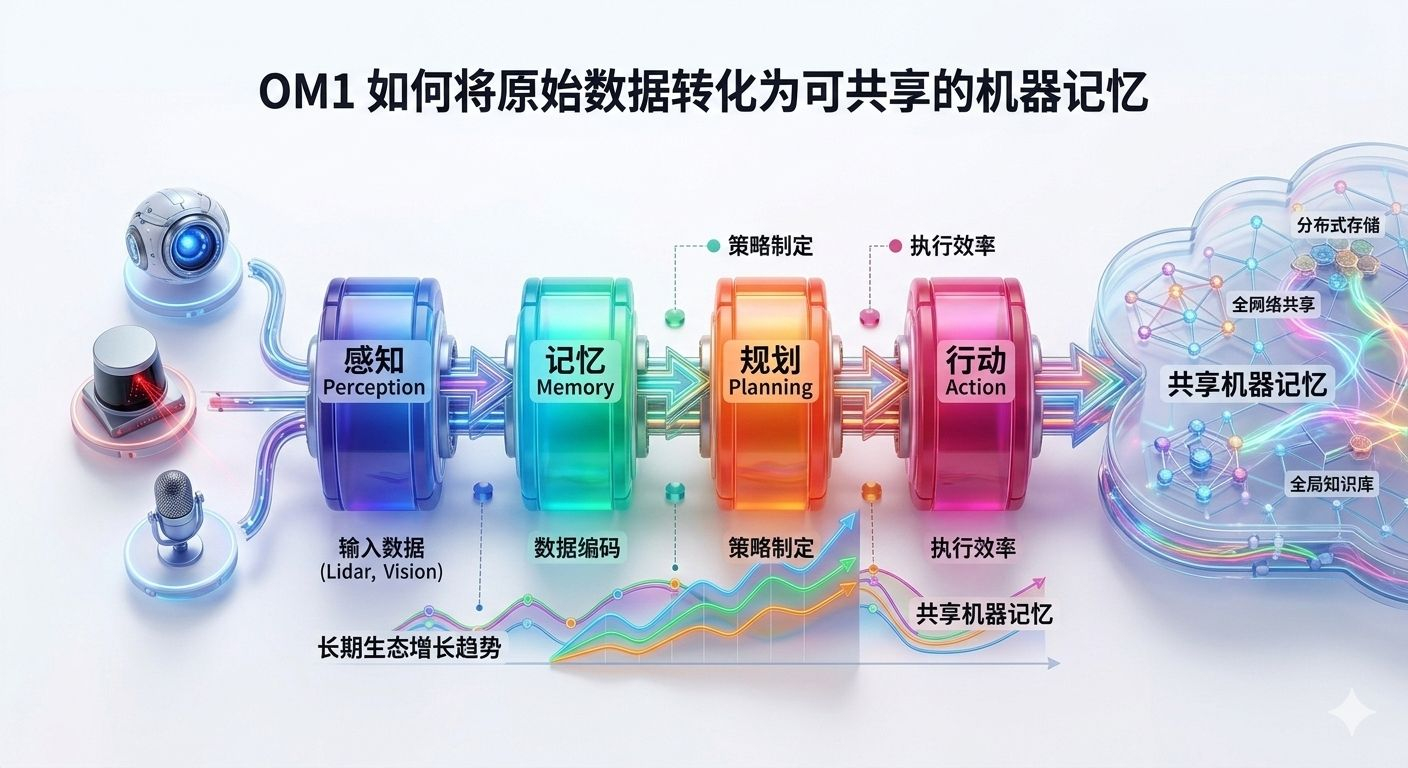
OM1 is often referred to as the 'universal robotic brain,' but in practice, it functions more like a translation framework for robotic cognition. Its architecture modularizes core functional components, typically implemented in Python, including:
Perception
Memory
Planning
Action
The operational process is roughly as follows:
The perception module receives data from cameras, LiDAR, or the network;
The memory module transforms data into structured information;
The planning module generates high-level strategies;
The action module executes decisions.
The uniqueness of OM1 lies in its use of a language-like data bus. The internal state and decisions of the system exist not in hard-to-understand numerical arrays, but are expressed in structured text. This design makes the system easier to debug, extend, and share information with other robots.
Developers can test through the WebSim browser simulator, and OM1 can also integrate with simulation platforms like Gazebo to validate robotic behaviors in virtual environments before deploying them to the real world. Virtual robots and real robots use the same high-level language for descriptions, creating a 'digital twin' effect.
The core significance is that robots not only execute actions but can explain their decision logic, enabling other systems to understand and assess their behavior.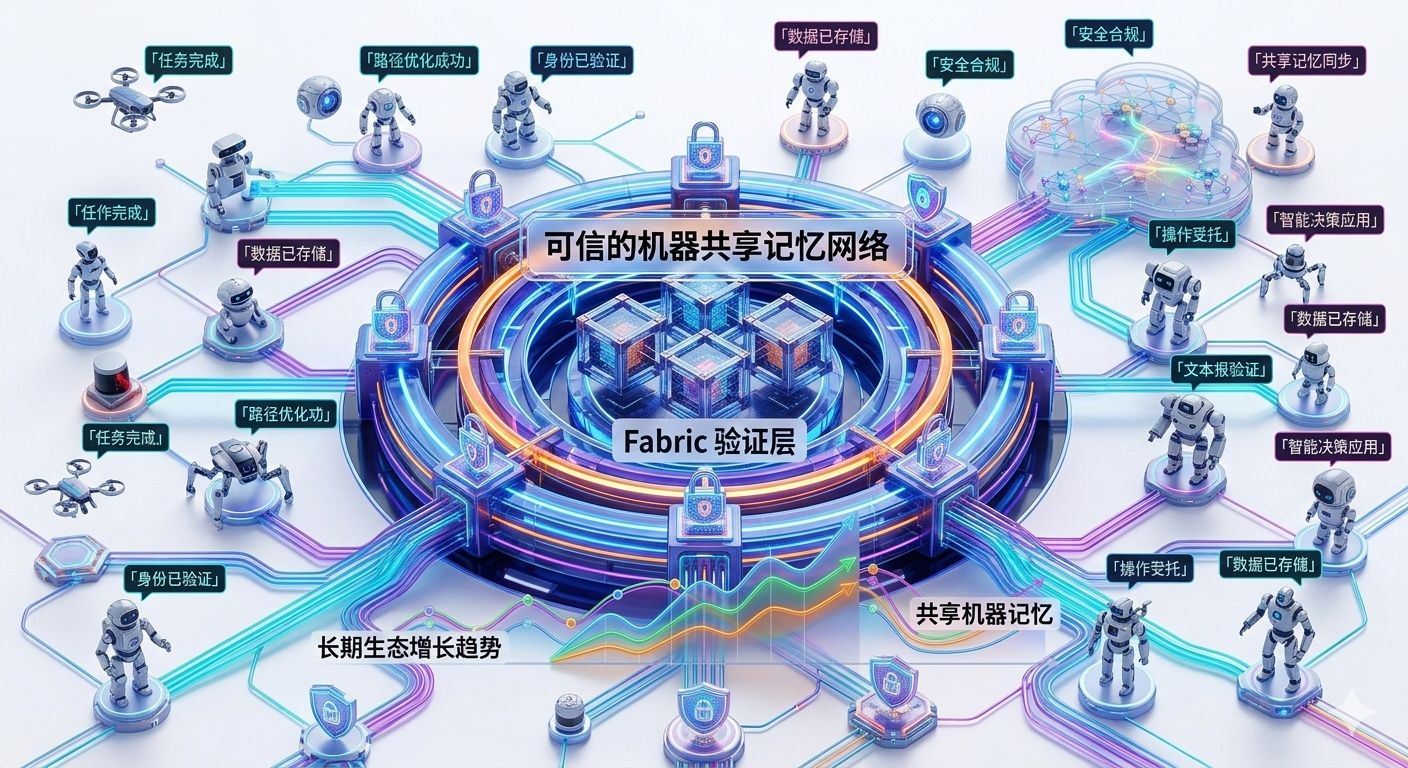
Fabric's verification layer: Making shared knowledge trustworthy
Current robotic systems typically only share underlying data, such as maps or control signals, but trust often relies on centralized management or default assumptions.
Fabric adds a layer of verification mechanism on top of this. Before robots accept information from other machines, they can verify:
Sender identity
Event location
Proof of task completion
Authenticity of encrypted signatures
Fabric acts more like a secure machine-to-machine social network. When robots complete tasks or acquire new skills, they generate structured reports accompanied by encrypted proofs. Other robots can query the ledger to verify the source and authenticity of the information.
For example, in a warehouse, a robot discovers a more efficient path. Under traditional models, such an optimization may only exist within a single system. However, through Fabric, that path and its proof of success can be published to the shared ledger, allowing other robots to download and utilize it.
What ultimately forms is a continuously accumulating 'robotic Wikipedia'—a collective memory system that grows over time.
Knowledge as an asset: Possibilities of a machine capital market
If machine-generated knowledge can be verified and shared, it may hold economic value.
Some investment perspectives suggest that Fabric can support the formation of knowledge markets. In this model:
Robots generate valuable knowledge (e.g., high-precision maps or optimized grasping strategies);
This knowledge is standardized and tokenized;
Other robots or developers can purchase or use it.
Unlike general ecological tokens, these types of knowledge tokens represent specific, verified information. Their value may depend on practicality, novelty, or scarcity.
This means that the robot economy may shift from hardware dominance to a focus on intellectual assets. Robots that continuously provide high-quality information may be more economically valuable than those performing repetitive tasks.
But this also brings new issues:
Who owns the data generated by robots?
How can knowledge quality be objectively assessed?
Will large enterprises hoard knowledge to form monopolies?
These issues have exceeded the discussion scope of traditional open-source licensing frameworks.
Trade-offs and challenges of shared memory
Building a machine sharing memory system is not without costs.
First, computation cost.
A large number of robots continuously publishing and verifying updates will increase the ledger load, which may affect real-time collaboration efficiency.
Second, privacy risks.
Detailed activity reports may expose environmental information, which could lead to surveillance and compliance issues if lacking filtering and encryption mechanisms.
Third, standard fragmentation.
The value of shared memory relies on economies of scale. If vendors adopt different standards, the system may split into multiple incompatible 'memory networks.'
Additionally, it involves real-world factors such as energy consumption, regulatory policies, and cybersecurity.
The success of the system relies on the balance between trust and participation: high participation but weak verification can lead to information distortion; strict verification but low participation can limit network value.
Conclusion
When we shift our perspective from 'tokens and payments' to 'knowledge flow', Fabric and OM1 demonstrate entirely different meanings. The real breakthrough is not that robots can be paid, but that they can record their observations and decisions in an understandable way and store them in shared memory.
OM1 allows machines to express their thought processes; Fabric ensures that these expressions are trustworthy. The combination of the two paints a future where the robot economy is based not only on hardware and financial transactions but also on verifiable machine memory.
This vision brings complex issues regarding ownership, privacy, and regulation, but also opens up higher levels of collaboration, adaptability, and transparency.
From this perspective, Fabric and OM1 are not merely payment infrastructures; they are an attempt to construct a 'collective consciousness' for machines.
#ROBO @Fabric Foundation $ROBO
